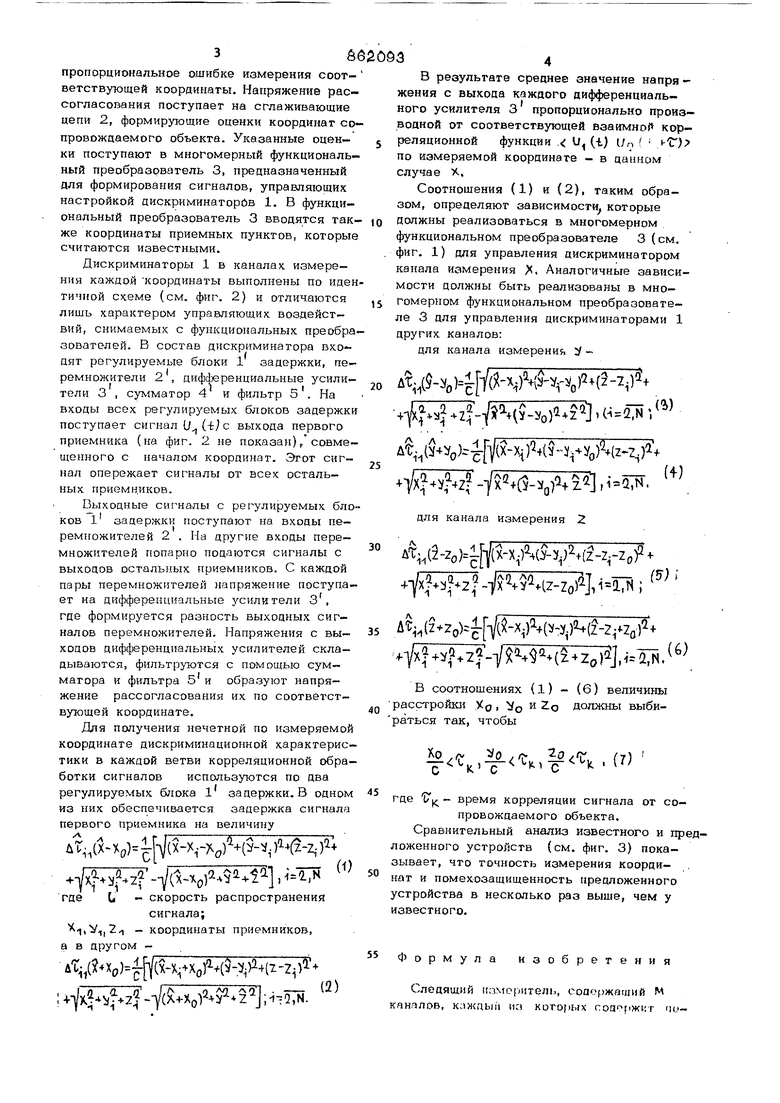
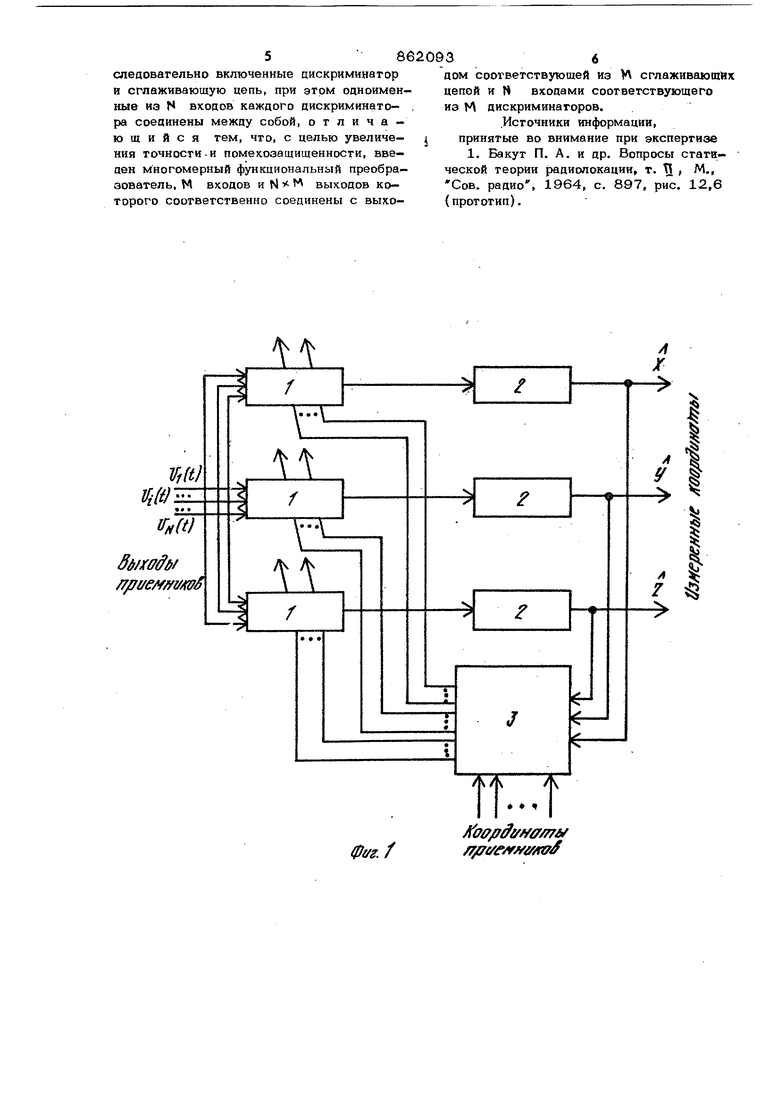
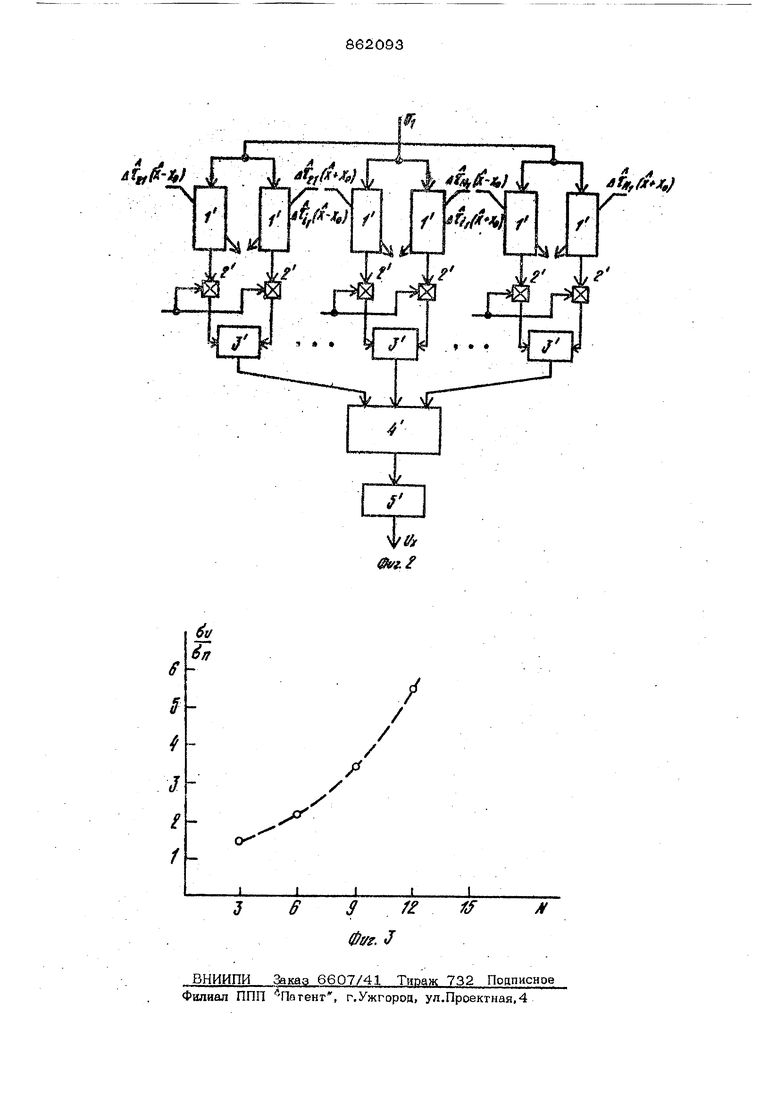
(54) СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ Изобретение относится к радиотехнике и может использоваться в пассивных многопоаиционных радиолокационнык системах для определения координат объектов. Известен следующий измеритель, содер жащий М каналов, каждый из которых содержит последовательно включенные дисKpmviHHarop и сглаживающую цепь. При этом одноименные из N входов каждого дискриминатора соединены между собой иД Однако известное устройство имеет низкие точность и помехозащищенность, т.к. ошибки от случайных помех в каждом канале практически не компенсируются, а измерение разностей задержек прихода сигналов происходит с ошибками. Цель изобретения - увеличение точности и помехозащищенности. Для этого в следящий измеритель, содержащий W каналов, каждый из которых содержит последовательно включенные дискриминатор и слагающую цепь, причем одноименные из N входов каждого дискри минатора соединены между собой, введен многомерный функциональный преобразователь, М входов и N W выходов которого соответственно соединены с выходом соответствующей из сглаживающих цепей и N входами соответствующего из дискриминаторов. На фиг. 1 приведена структурная электрическая схема предложенного устройства; на фиг. 2 - пример выполнения дискриминатора; на фнг. 3 - график отношения суммарной среднеквадратической ошибки С)/ известного устройства к той же ошиб- ке (in предложенного устройства. Следящий измеритель содержит в каждом из М каналов дискриминатор 1, сглаживающую цепь 2, а также многомерный функциональный преобразователь 3. Следящий измеритель работает следующим образом. На N входов каждого дискриминатора 1 поступают напряжения U (tj от всех N приемников (на фиг. 1 не показано). На выходе,.каждого дискриминатора Аормируется напряжение рассогласования 3se пропорциональное ошибке измерения соот- ветствутощей координаты. Напряжение рассогласования посгупает на сглаживающие цепи 2, формирующие оценки координат сопровождаемого объекта. Указанные оцен ки поступают в многомерный функциональный преобразователь 3, прецназнаменный для формирования сигналов, управляющих настройкой дискриминаторов 1. В функци- ональный преобразователь 3 вводятся также координаты приемных пунктов, которые считаются известными. Дискриминаторы 1 в каналах измерения каждой координаты выполнены по иден тичной схеме (см. фиг. 2) и отличаются лишь характером управляющих воздействий, снимаемых с функциональных преобра зователей. В состав дискриминатора вхО дят регулируемые блоки 1 задержки, перемножители 2, цифсЬеренциальные усилители з, сумматор 4 и фильтр 5. На входы всех регулируемых блоков задержки поступает сигнал U(i/с выхода первого приемника (на фиг. 2 не показан), совмещенного с началом координат. Этот сигнал опережает сигналы от всех остальных приемников. Выходные сигналы с регулируемых бло ков l задержки поступают на входы пе- ремножителей 2 . На другие входы перемножителей попарно подаются сигналы с выходов остальных приемников. С каждой пары перемножителей напряжение поступает на дифференциальные усилители 3 , где формируется разность выходных сигналов перемножителей. Напряжения с выходов дифференциальных усилителей складываются, фильтруются с помощью сумматора и фильтра 5 и образуют напряжение рассогласования их по соответствующей координате. Для получения нечетной по измеряемой координате дискриминационной характеристики в каждой ветви корреляционной обработки сигналов используются по два регулируемых блока l задержки. В одном из них обеспечивается задержка сигнала первого приемника на величину .cx-b)yi;(x-v ) где L - скорость распространения сигнала; (l.,, - координаты приемников, а в другом A:i,(Xo)i{f5 x/H5-.)4(i-Zi): ( результате среднее значение напря жения с выхода каждого дифференциального усилителя 3 пропорционально производной от соответствующей взаимной корреляционной функции . If (t) Un ( -L) по измеряемой координате - в данном случае X. Соотношения (1) и (2), таким образом, определяют зависимости которые должны реализоваться в многомерном функциональном преобразователе 3 (см. фиг. 1) для управления дискриминатором канала измерения , Аналогичные зависимости должны быть реализованы в многомерном функциональном преобразователе 3 для управления дискриминаторами 1 других каналов: для канала измерения 2 A.(D))) (-:/o) n-,) 4,оЬгр-Х|)24($-.-Уо)-{2) канала измерения 2 At,(Zo)4px; 4ff7.-1(, i .(o)4№( Yx.y.2f-f.4i-Zo),.. в соотношениях (1) - (6) величины расстройки УО , VQ и ZQ ДОЛЖНЫ Быбираться так, чтобы ,t,,tr, .(7) где V| - время корреляции сигнала от сопровождаемого объекта. Сравнительный анеитиз известного и предложенного устройств (см. фиг. 3) показывает, что точность измерения коорди- . нат и помехозащищенность предложенного устройства в несколько раз вЫше, чем у известного. Формула изобретения Следящий 11амо -п1тел1., содоржащий М каналов, кажцьл но кото1)ых пислеаовагельно включенные дискриминатор и сглаживающую цепь, при этом одноимен ныв иа N входов каждого дискриминатора соединены между собой, отличающийся тем, что, с целью увеличения точности.и помехозащищенности, введен многомерный функциональный преобразователь, М входов и N t выходов которого соответственно соединены с выходом соответствующей из V сглажива)ошмх цепей и N входами соответствующего из М дискриминаторов.
Источники информации, принятые во внимание при экспертизе
1. Бакут П. А. и др. Вопросы статической теории радиолокации, т. ti , М., Сов. радио, 1964, с. 897, ркс. 12,6 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ДИСКРИМИНАТОР | 1999 |
|
RU2153702C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| БОРТОВОЙ ИЗМЕРИТЕЛЬ РАЗНОСТИ ДАЛЬНОСТЕЙ ДЛЯ СИСТЕМЫ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018869C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ СИГНАЛОВ ПЕЛЕНГОВАНИЯ ОБЪЕКТА ВИЗИРОВАНИЯ ИНЕРЦИАЛЬНОГО И РАДИОЛОКАЦИОННОГО ДИСКРИМИНАТОРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488137C2 |
| СЛЕДЯЩИЙ ПРИЕМНИК ШИРОКОПОЛОСНОГО СИГНАЛА | 1999 |
|
RU2157052C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| Следящий фильтр фазоманипулированного псевдослучайного сигнала | 1982 |
|
SU1072252A1 |
П-.-Т
A0ff/f yf/ffff76f
/7/7e/e f/ff/af
-JZ/
лГ/fffjf jf f) /
