(54) УСТРОЙСТВО АВТШАТИЧЕСКОГО ОСТАНОВА РЕВЕРШВНОГО СТАНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической точной остановки реверсивного прокатного стана с моталками | 1977 |
|
SU692648A1 |
| Устройство для автоматического сопровождения сварных швов и останова реверсивного прокатного стана | 1977 |
|
SU743739A1 |
| Устройство автоматического торможения реверсивного стана холодной прокатки | 1990 |
|
SU1787478A1 |
| Устройство автоматического торможения реверсивного стана холодной прокатки | 1980 |
|
SU937070A1 |
| Устройство автоматического останова реверсивного стана | 1983 |
|
SU1308410A1 |
| Устройство для торможения реверсивного стана холодной прокатки | 1977 |
|
SU929260A1 |
| Устройство для автоматического замедления и точного останова реверсивного стана холодной прокатки | 1976 |
|
SU713629A1 |
| БИБЛИОТЕКА jМ. Л. Прудков | 1972 |
|
SU338980A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СКОРОСТИ ВХОДА МЕТАЛЛА В КЛЕТЬ ПРИ ПРОКАТКЕ | 1973 |
|
SU405614A1 |
| УСТРОЙСТВО КОРРЕКЦИИ по ВЕЛИЧИНЕ ОБЖАТИЯ | 1970 |
|
SU266905A1 |
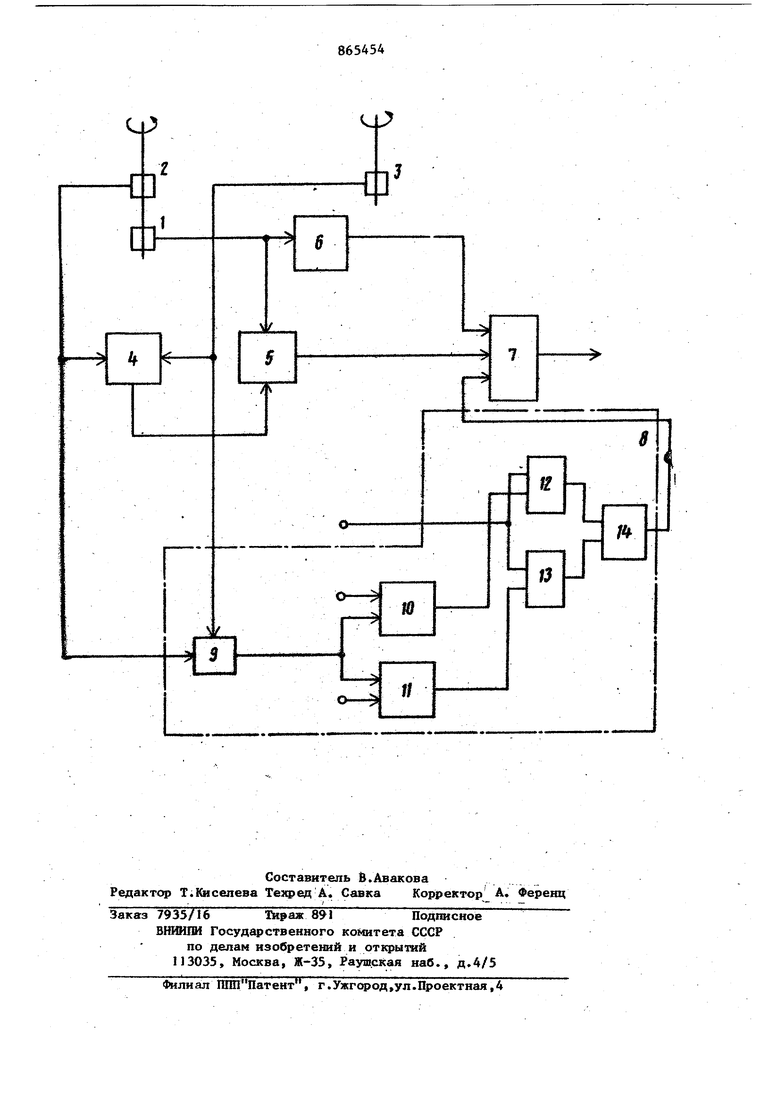
Изобретение относится к автомати ции станов для прокатки полосы и, в частности к автоматизации станов холодной прокатки полосы. Наиболее близким к предлагаемому по технической сущности и достигаемо му результату является устройство, содержащее датчики положе1шя моталок датчики скорости моталок и рабочих валков клети, блок умножения, блок сравнения, блок контроля датчиков положения и блок управления, причем входы блока умножения соеднне1&1 с выходами датчиков скорости разматывающей моталки и валков клети, входы блока сравнения с выходами датчика положения разматывающей моталки и блока умножения, а выходы блока сравнения и блока контроля датчиков положедая - со входами блока управления. В известных устройствах и система сигнал положения разматывающей мотал ки используют в качестве задания скорости гфи торможении стана. По мере пpибJшжeння к заданному положению сигнал положения убывает, т.е. с{шжается уровень задагагя скорости. Когда уровень заданной скорости становится меяыне, чем уровень фактической скорости, схема сравнения вырабатывает снгйал на торможение стана. Используе шй в качестве сигнала обратной связи дпя систем автоматического останова сигнал скорости в современных системах представляет собой некоторую функцию, например щ оиэведение угловых скоростей размап ающей моталюи и рабочих валков кле-га, что позволяет учесть факторы обжатия и переменность диаметра рулона на разматывающей моталке ПД Однако они не обнаруживают аварийного исчезновения сигнала обратной связи системы - сигнала скорости, например, из-за выхода из строя как самих датчиков скорости, так и связей между датчиками и механизмами ИЛИ между датчиками и остальной аппа ратурой устройства, расстояния между которыми бывают весьма значительны. Так как при аварийном исчезновени сигнала скорости схема сравнения ведет себя так же, как и при уровне задания вьше уровня фактической скорости , и создается аварийная ситуация для стана - торможение не наступает, происходит вьфывполосы из ра матывающей моталки и вход необжатого конца полосы в рабочие валки клети. Известно, что для современных реверсивных станов холодной прокатки полосы характерна безредуктовая связ двигателей рабочих валков клети и моталок с датчиками, т.е. последовательное соединение валков двигателя и датчика. Нарушение связи между ABHi ателем и ближайшим к нему датчи ком выводит из работы этот и все по следующие датчики, в результате чег принцип дублирования аппаратуры системы автоматического останова оказывается непригодным в случае возникновения такой неисправности. Нарушение связи в любом месте после довательно соединенных датчиков нередко наблюдается в промышленарй эксплуатации, так как приводы стана работают со скоростями и нагрузками которые могут быть резкопеременными по величине и знаку, например, при обрывах полосы и выходе полосы из клети. Цель изобретения - повьшение надежности останова стана при аварийном исчезновении сигнала скорости. Поставленная цель достигается тем, что известное устройство, соде жащее датчики положения моталок, датчики скорости моталок и рабочих валков клети, блок умножения, блок сравнения, блок контроля датчиков положения и блок управления, причем входы блока умножения соединены с выходом датчиков скорости разматывающей моталки и рабочих валков клети, входы блока сравнения - с выходом датчика положения разматывеющей моталки и блока умножения, а выходы блока сравнения и блока контроля датчиков положения - со входом блока управления, дополнител но содержит схему контроля наличия сигнала скорости, содержащую блок деления, два компаратора, две логическизс счемы И и логическую схему ЛИ причем вход делимое блока еления подключен к выходу датчика корости рабочих валков клети, ход делитель - к датчику скороси разматывающей моталки, выход частное - к одному из входов комараторов, выход каждого из котоых подключен к одному из входов хемл И, выходы схем И соединены о входами схемы ИЖ, выход которой одключен ко входу блока управления. Известно, что при работе с натяением угловые скорости рабочих алков клети и разматывающей мотали связаны соотношением Ef - .S)u.,v(; Й% где Шрц - угловая скорость разматывающей моталкиj угловая скорость рабочих валков клети диаметр рулона на разматывающей мoтaлкe, Диаметр рабочих валков, толщина полосы на выходе из клети; толщина полосы на входе в клеть-, опережение металла на выходной стороне клети. Для современных реверсивных станов холодной прокатки максимальные диапазоны возможных изменений lie. Дв. т - BI г и 5 составляют соответственно 1 11,1 , 1:2 и 1:0,95. Следовательно, обший максимальный диапазон отношения -.., составляет UUg, 1,13-2-,,. (2) tUpM Ситуация, при которой отношение становится меньшим 1,0, свишрмдетельствует о неисправности в ipaKте передачи сигнала скорости рабочих . валков клети, а ситуация, при которой отношение -(jjf становится больше 7,0, свидетельствует о неисправности в тракте передачи сигнала скорости разматывающей моталки. На чертеже .представлена блок-схема предлагаемого устройст ,а. Блок-схема содержит датчик 1 положения разматывающей моталки, датчик 2 скорости разматывающей моталки, датчик 3 скорости рабочих валков клети, блок 4 умножения, блок 5 сравнения, блок 6 контроля датчиков положения, блок 7 управления и схему 8 контроля наличия сигнала скорости, включающую блок 9 деления, компараторы 10 и 11, схемы И 12 и 13 и схе му 14. Устройство работает следующим образом. В процессе прокатки сигнал положения разматывающей моталки, формируемый датчиком 1 и служащий сигналом задания скорбсти стана, т.е. кле - ти, в процессе автоматического останова стана сравнивается в блоке 5 сравнения с выходным сигналом блока 4 умножения. Последний сигнал является сигналом обратной связи по скорости и пропорционален сигналу произведения сигналов угловых скоростей разматывающей моталки и рабочих валков клети, формируемых датчиками 2 и 3 соответственно. Выходные сигналы блока 5 сравнени и блока 6 контроля датчиков положени воздействуют на блок 7 управления, представляющий собой, например, задатчик интенсивности в схеме управл ния скоростью стана. Такой задатчик как известно, имеет входы для разных Зфовней задания интенсивности изменения выходного сигнала задатчика, например, нормальной и увеличенной, по сравнению с нормальной, интенсивности . Выходной сигнал блока 5 сравнения воздействует на вход нормальной интенсивности задатчика интенсивности, а выходной сигнал блока 6 контроля датчиков положения - на вход увеличенной интенсивности. Схема 8 контроля наличия сигнала скорости работает следующим образом. Блок 9 деления производит деление сигнала угловой скорости рабочих вал ков клети на сигнал угловой скорости разматывающей моталки; Выходной сигн блока 9, пропорциональный результату деления -Qjla в соответствии с выражением 2 имеет диапазон изменения не более 1:7, для любого из современнь х реэерсивных станов холод ной прокатки. В соответствии с этим диапазоном изменения выходной сигнал блока 9 сравнивается на компараторе 10 с сигналом, пропорциональным принятому максимальному значению выходного сигнала блока 9, а на компараторе 11 - с сигналом, пропорциональным 1:7 от принятого максимального значения выходного сигнала блока 9. Эти два значения постоянных . сигналов для компараторов 10 и П могут сниматься, -например, с потенциометров, входы которых подклйчены к источнику питания компараторов. Обозначим принятое максимаг1ьное значение выходного сигнала блока 9 через Ug , а все другие значения выходного сигнала этого блока черезЦ Компаратор 10 работает в соответствии с условиями: а)если и Uo, то на компаратора удерживается нулевой позиционный сигнал 1 б)ecmi , то на выходе компаратора устанавливается единичный позиционный сигнал. Компаратор 11 работает в соответствии с условиями: а)если , то на выходе компаратора удерзшвается нулевой позиционный сигнал} б)если U -iUo то на выходе компаратора устанавливается единичный позиционный сигнал. При нормальной работе датчиков 2 и 3 скорости и трактов сигналов этих датчиков la выходе компараторов 10 и 11 удерживается нулевой позиционный сигнал, соответствующий логическому О. При выходе из строя датчика 2 или тракта его выходного сигнала выходной сигнал блока 9 становится большим величины приводит к появлению единичного позиционного сигнала на выходе компаратора 10. При выходе из строя датчика 3 или тракта его выходного сигнала выходной сигнал блока 9 становится меныанм 1 б что приводит к появлеш1ю еданичного позиционного сигнала на выходе компаратора П . Единичтвле позиционные сигналы компараторов, соответствукш91е логической 1, через схемы U 12 и 13, вве-г енные для того, чтобы избежать возействия схемы 8 на блок 7 при знаениях скорости, близких в нулевому, огда частное -ц, стремится к непределенности вида-2- , и своими свог одными входами соединяемые с выхоом нуль-органа сигнала скорости стаа, имеющегося в схемах управления коростью стана, при скорости стана ыше некоторого малого значения, затавляют срабатывать схемы И Г2 или 3, выходные сигналы которых через хему ИЛИ 14, воздействуют на блок управления таким же образом, как то делает блок 6 контроля датчиков оложения. Блоки 9-11 устройства могут быть выполнены и цифровыми. Алгоритм обнаружения аварийного исчезновения сигнала скорости стана при таком исполнении блоков остается прежним Использование схемы контроля наличия сигнала скорости выгодно отличает предлагаемое устройство автрматическогр останова реверсивного стана от известного, так как существенно повьшается надежность останова устройством автоматического останова для случаев появле1ия неисправности в наиболее кри1%чных местах устройства - связях его датчиков с механизмами стана и с остальной аппаратурой устройства. Кроме того, появляется сопутствующий дополнительный положительный эффект отпадает необходамость в дублировании собственно датчиков скоростей. Применение предлагаемого устройства автоматического останова стана создает экономический эффект за сч повышения надежности.останова, что ведет к большим срокам сохранности рабочих валкор и механизмов моталок стана и за счет удешевления устройс ва в результате отказа от дубгррова ния датчиков скорости.
Формула изобретения
Устройство автоматического останова реверсивного стана, содержащее
Источники информации, 1 принятые во внимание при экспертизе
I.Авторское свидетельство СССР 549188, кл. В 21 В 37/00, 1976. 48 датчики положения моталок, датчики скорости моталок и рабочих валков клети, блок умножения, блок сравнения блок контродя- датчиков положения и блок управления, причем входы блока . умножения соединены с выходами датчиков скорости рас матывающей моталки и рабо,чих валков клети, входы блока сравнения - с выходами датчика положения разматывающей моталки и блока умножения, а выходы блока сравнения и блока контроля датчиков положения - со входами блока управле1шя, отличающееся тем, что, с целью повышения надежности останова стана при аварийном исчезновении сигнала скорости оно дополнительно содержит схему контроля наличия сигнала скорости, содержащую блок деле.ния, два компаратора, две логических схемы И и логическую схему ИЛИ, причем вход делимое блока деления подключен к выходу датчика скорости делитель рабочих валков клети, вход к датчику скорости разматываюп ей моталки, выход частное - к одному из входов компараторов, выход каждого из которых подключен к одному из входов схемы И, выходы схем И соединены со входами схемы ИЛИ, выход которой подключен ко входу блока управления.
