2. Манипулятор по п 1, о т л и - чающийся тем,что,с цельюобес- печенид переналадки его по вертикали, на втулке выполнен ряд крепежных мест для кронштейна,а ось вилки выполнена с рядомвертикально расположенных отверстий и закреплена на механической руке посредством сменного пальца. .
Изобретение относится к литейному производству и, в частности, к механизации съема отливок, в машинах- литья под низким давлением.
Целью изобретения является расширение технологических возможностей и повышение производительности манипулятора.
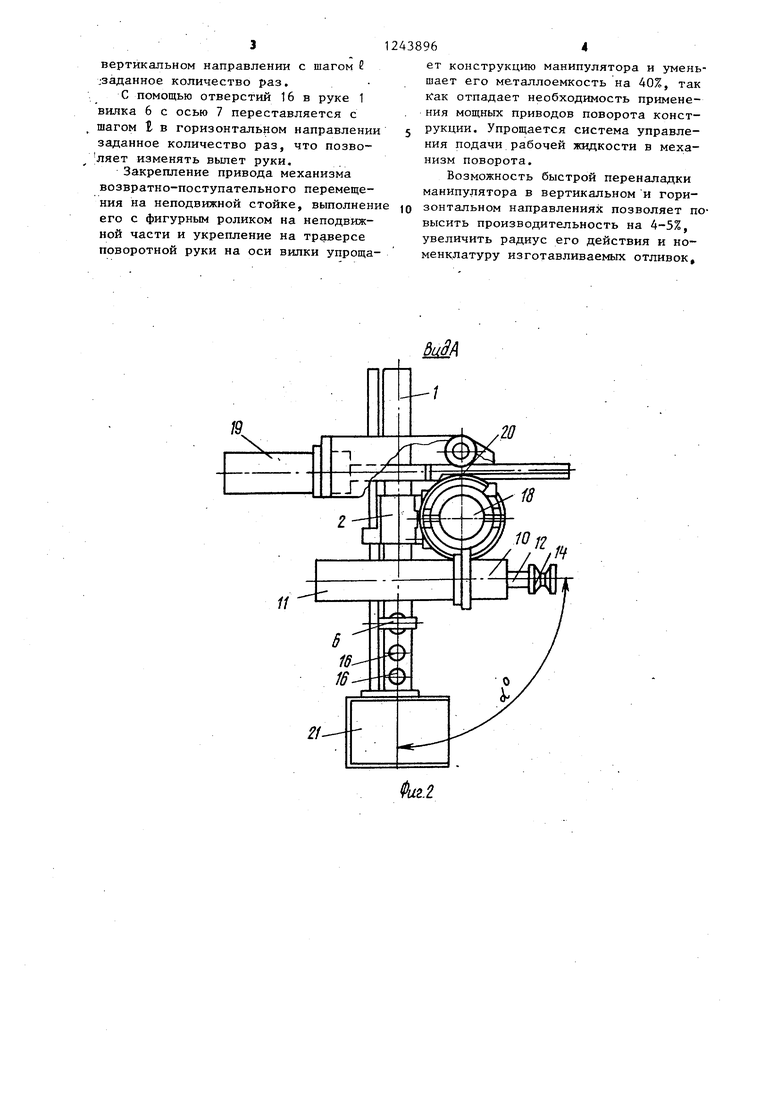
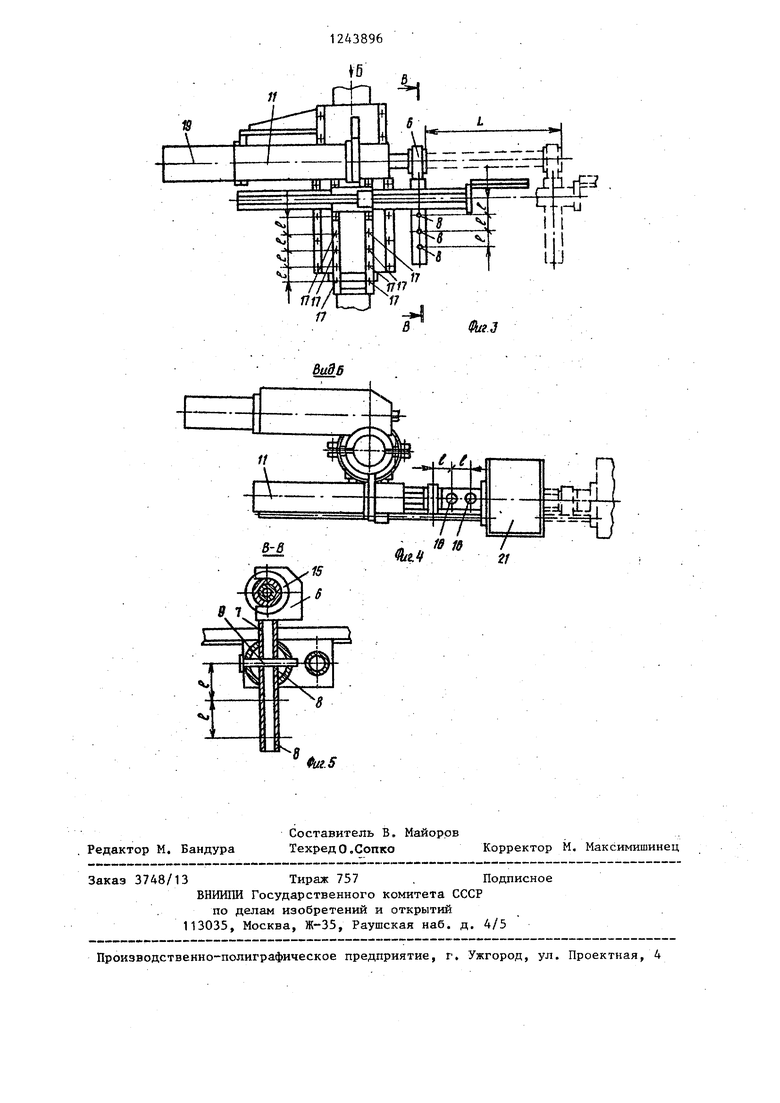
На фиг. 1 изображен манипулятор для съема отливок в исходном положении; на фиг.2 - вид А на фиг. 1; на фиг.З - манипулятор с повернутой, поворотной рукой; на фиг; 4 -вид Б на фнг.3;на фиг. 5- разрез В-В на фиг.З.
Манипулятор содержит механическую руку 1,которая крепится через направляющий кронштейн 2 к направляющим площадкам 3 поворотной втулки 4, установленной на неподвижном основании 5, имеет вилку 6, закрепленную на оси 7 через одно из отверстий 8 сменным пальцем 9, механизм 10 возвратно-поступательного перемещения руки с гидроцилиндр6м 11, на штоке 12 которого закреплен ролик 13, имеюш ий фигурную проточку 14. В вилке 6 выполнен паз 15, имеющий конфигурацию, соответствующую профилю ролика 13.
На руке 1 выполнены горизонтально расположенные отверстия 16, диаметр которых соответствует диаметру оси 7 и которые предназначены для переналадки вилки 6 в горизонтальном направлении.
В направляющих площадках 3 поворотной втулки 4 вьшолнен ряд крепежных мест 17 под кронштейн 2, соответствующий крепежным от:перстиям 8 оси 7. С помощью отверстий 8 и крепеж ных мест 17 производят переналадку поворотной руки 1 в вертикальном на3. Манипулятор по п, 1, отличающийся тем, что, с целью обеспечения переналадки его по горизонтали, на механической руке выполнен ряд горизонтально расположенных от)зерстий, диаметр которых соответствует, диаметру оси вилки.
0
15
20
25
30
35
40
правлении. Неподвижное основание 5 выполнено в виде, стойки 18.
Для вращения вокруг неподвижной стойки 18 втулки 4с механическойрукой 1 установлен привод 19 с реечной передачей 20.
- Для приема отливок на руке 1 жестко закреплен приемный лоток 21.
Манипулятор работает .следзгющим образом,,
В исходном положении лоток 21 находится в крайнем левом положении (фиг. 1 и 2).
При включении привода 19 реечной передачей 20 втулка 4 с рукой 1 поворачивается вокруг основания 5 на заданный угол , как показано на фиг. 3 и 4. При этом вилка 6 входит в зацепление своим пазом 15 с фигурной проточкой 14 ролика 13.После включения привода механизма 10 возвратно-поступательного перемещения шток 12 через ролик 13 и вилку 6 выдвигае руку 1 с лотком 21 на заданное расстояние, необходимое для ввода лотка между полуформами (не показаны).
После съема отливки шток 12 обратным ходом через ролик 13 и вилку 6 выводит лоток 21 с отливкой (не показана) из полуформ.
После выключения привода 19 поворотная рука 1 поворачивается в крайнее левое положение (исходное), При этом в.илка 6 выходит из зацепления с роликом 13. Манипулятор снова готов к операции съема отливки.
С помощью отверстий 8 на оси 7, сменного пальца 9 и крепежных мест 17, выполненных на направляющих площадках 3 под кронштейн 2, вилка 6 и рука 1 могут переналаживаться в
вертикальном направлении с шагом 2 ;заданное количество раз,
С помощью отверстий 16 в руке 1 вилка 6 с осью 7 переставляется с шагом в горизонтальном направлении заданное количество раз, что позво- ляет изменять вьшет руки.
Закрепление привода механизма возвратно-поступательного перемещения на неподвижной стойке, выполнени его с фигурным роликом на неподвижной части и укрепление на траверсе поворотной руки на оси вилки упроща
2438964
ет конструкцию манипулятора и уменьшает его металлоемкость на 40%, так iCaK отпадает необходимость применения мощных приводов поворота конст- 5 рукции. Упрощается система управления подачи рабочей жидкости в механизм поворота.
Возможность быстрой переналадки манипулятора в вертикальном и гори- )0 зонтальном направлениях позволяет повысить производительность на 4-5%, увеличить радиус его действия и номенклатуру изготавливаемых отливок.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Поточная линия для изготовления модельного блока в точном литье | 1983 |
|
SU1473900A1 |
| Манипулятор для раздельного съема отливок и литниковой системы | 1980 |
|
SU865515A1 |
| Устройство для сборки | 1991 |
|
SU1757836A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Автомат для изготовления электрических катушек | 1980 |
|
SU888228A2 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| Автомат для изготовления электрических катушек | 1980 |
|
SU892491A1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| Механическая рука к прессу | 1988 |
|
SU1611755A1 |
ю
,10
Фиг. 5
e 2f
Редактор М. Бандура
Составитель В. Майоров
Техред О ,Сопко Корректор М. Максимишинец
Заказ 3748/13Тираж 757 , Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий: 113035, Москва, Ж-35, Раушская наб. д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Кокильный станок | 1976 |
|
SU609594A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Манипулятор для машины литья под давле-НиЕМ | 1979 |
|
SU831311A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
