1
Изобретение касается автоматизации горного оборудования.
Известно устройство для измерения углового отклонения ковша экскаватора от вертикальной плоскости стрелы, включающее датчики скорости и ускорения движения поворотной платформы, вычислитель параметров движения ковша с датчиками длин тягового и подъемного канатов и с выходными блоками определения расстояния ковша до плоскости, проходящей через ось вращения экскаватора и перпендикулярной к вертикальной плоскости стрелы, определения скорости изменения этого параметра, определения скорости изменения расстояния ковша до стрелы и определения обратной величины расстояния ковща до стрелы.
Цель изобретения - повышение точности измерения.
Для этого к блокам определения расстояния ковша до плоскости, проходящей через ось вращения экскаватора и перпендикулярной к вертикальной плоскости стрелы, определения скорости изменения этого параметра, определения скорости изменения расстояния ковша до стрелы подключены соответственно блоки произведения, к входам одних из которых подключены датчики скорости и ускорения движения поворотной платформы, а выходы блоков произведения подключены на
вход сумматора, выход которого соединен с одним из входов дополнительного блока произведения, другой вход которого подключен к блоку определения обратной величины расстояния ковша до стрелы, а выход соединен с интегратором, один из выходов которого, в свою очередь, соединен с блоком произведения, подключенного к блоку определения скорости изменения расстояния ковша до стрелы, а другой - соединен со входом интегратора, связанного с сумматором.
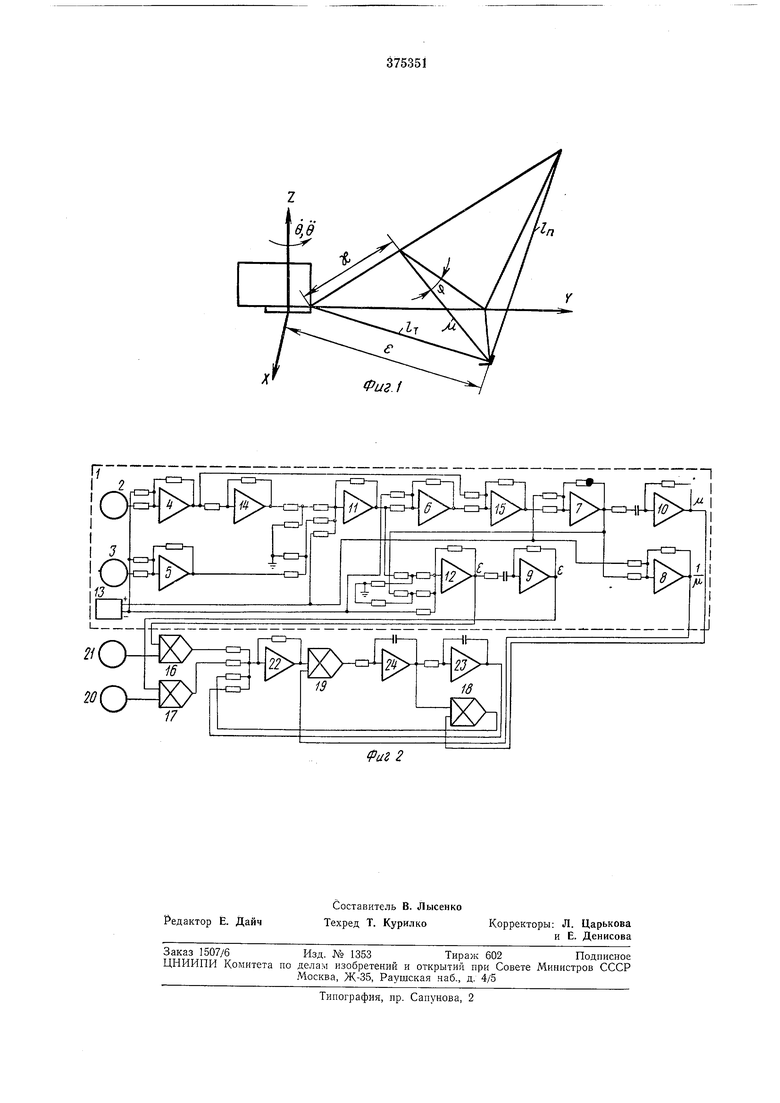
На фиг. 1 показано положение ковша экскаватора в пространстве относительно вертикальной плоскости стрелы; на фиг. 2 - припципиальная схема предлагаемого устройства.
Предлагаемое устройство основано на определении углового отклонения ковша из уравнения его колебаний относительно вертикальной плоскости стрелы, которое имеет вид:
fa + а;р + /C/f + sH + ев - О,
где гр, ф, ф - угол, скорость и ускорение отклонения ковша,
6, 9 - скорость и ускорение поворотной платформы,
,11 - кратчайшее расстояние от ковша до стрелы,
Е - расстояние от ковша до плоскости, проходящей через ось вращения экскаватора и перпендикулярной к вертикальной плоскости стрелы,
Ki - постоянный коэффициент. В свою очередь, параметры траекторного движения ковша ц и е связаны с длинами тягового (If) и подъемного (/п) канатов следующим образом:
хгг, + /С,/ -К/п;
;..«;
е к,- + К.1 + К,;
где X - расстояние от пяты стрелы до проекции ковша на стрелу, Kz, Кз, Ki, Ks, Ке, Ki - постоянные коэффициенты.
Устройство состоит из вычислителя 1 параметров движения ковша с датчиками длин тягового 2 и подъемного 3 канатов. В вычислителе / нелинейные операции возведение в
квадрат (/т /п, х-) осуш.ествляются соответственно на блоках 4, 5, 6, извлечение квадратного корня ( У) - на блоке 7, воспроизведение зависимости блоке 8, а блоки 9, 10 выполняют операцию дифференцирования. На входы блоков 4, 5, 6, 7, 8, а также на входы блоков 11, 12 подается смешаюшее напряжение от источника питания 13. В вычислителе / нелинейные операции апроксимированы линейными.
Вычислитель 1 также содержит инвертор 14 и сумматор 15. На блоки 16, 17, 18 умножения и дополнительный блок 19 поступают соответственно с выходов блоков 12, 9, 10, 8 напряжения, пропорциональные величинам е, е, ц, 1/|д,. Кроме того, на блоки 17, 16 умножения поступают сигналы с датчиков скорости 20 и ускорения 21 движения поворотной платформы. Вход сумматора 22 соединен с выходами блоков умножения 16, 17, 18 и с выходом интегратора 23. Сумматор 22 выполняет функцию алгебраического суммирования, на выходе которого формируется напряжение, пропорциональное величине ц ср.
На выходе дополнительного блока умножения 19 формируется напряжение, пропорциональное ускорению углового отклонения ковша ф. С выходов интеграторов 24 и 23 (с нулевыми начальными условиями) снимаются напряжения, пропорциональные скорости ф и
углу отклонения ковша экскаватора ф. Полученные напряжения подаются соответственно на блоки 18 и 22.
Искомый параметр, т. е. угловое отклонение ковша от вертикальной плоскости стрелы экскаватора, снимается с выхода блока 23 в виде напряжения постоянного тока.
Значения длин тягового и подъемного канатов, а также скорости и ускорения поворотной платформы экскаватора определяются непосредственно из объекта.
Предмет изобретения
Устройство для измерения углового отклонения ковша экскаватора от вертикальной плоскости стрелы, включающее датчики скорости и ускорения движения новоротной платформы и вычислитель параметров движения ковша с датчиками длин тягового и подъемного канатов и с выходными блоками определения расстояния ковша до плоскости, проходящей через ось вращения экскаватора и нерпендикулярной к вертикальной плоскости стрелы, определения скорости изменения этого параметра, определения скорости изменения расстояния ковша до стрелы и определения обратной величины расстояния ковша до
стрелы, отличающееся тем, что, с целью повышения точности, к блокам определения расстояния ковша до плоскости, проходящей через ось вращения экскаватора и перпендикулярной к вертикальной плоскости стрелы,
определения скорости изменения этого параметра и скорости изменения расстояния ковша до стрелы подключены соответственно блоки произведения, к входам одних из которых подключены датчики скорости и ускорения движения поворотной платформы, а выходы блоков произведения подключены на вход сумматора, выход которого соединен с одним из входов дополнительного блока произведения, другой вход которого подключен к
блоку определения обратной величины расстояния ковша до стрелы, а выход соединен с интегратором, один из выходов которого, в свою очередь, соединен с блоком произведения, подключенного к блоку определения скорости изменения расстояния ковша до стрелы, а другой - соединен со входом интегратора, связанного с сумматором.
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1989 |
|
SU1795010A2 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Устройство для определения расстояния ковша драглайна от вертикальной плоскости стрелы | 1977 |
|
SU657130A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1984 |
|
SU1219754A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Устройство для контроля положенияКОВшА эКСКАВАТОРА-дРАглАйНА | 1979 |
|
SU827709A1 |
| Устройство для измерения углового отклонения ковша экскаватора от вертикальной плоскости | 1983 |
|
SU1121357A1 |