(54) ЗАГРУЗОЧНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат питания для поштучной выдачи изделий | 1980 |
|
SU897468A2 |
| Загрузочное устройство роторно-конвейерной машины для сборки втулочно-роликовой цепи | 1982 |
|
SU1058702A1 |
| Роторно-конвейерная машина | 1982 |
|
SU1046068A1 |
| Роторный автомат для закалки деталей | 1982 |
|
SU1096289A1 |
| Загрузочное устройство роторно-конвейерной машины | 1985 |
|
SU1255262A1 |
| УСТРОЙСТВО ПОДАЧИ ДЕТАЛЕЙ | 2013 |
|
RU2533980C1 |
| Загрузочный ротор | 1988 |
|
SU1599177A1 |
| Роторный автомат питания | 1983 |
|
SU1161326A1 |
| РОТОРНАЯ МАШИНА СБОРКИ | 1992 |
|
RU2014195C1 |
| Роторный автомат для термической обработки изделий | 1980 |
|
SU954444A1 |
I
Изобретение относится к машиностроению и может быть использовано при автоматизации загрузки станков и автоматических линий.
Известно загрузочное устройство, содержащее бункер, стержневой захват с осевым отверстием, установленный с возможностью возвратно-поступательного перемещения и связанный с источником вакуума 1.
Недостатком известного устройства является возможность загрузки лишь тех деталей, ось которых расположена соосно осевому отверстию стержневого захвата, что снижает производительность устройства.
Цель изобретения - повышение производительности устройства.
Указанная цель достигается тем, что устройство снабжено установленным соосно стержневому захвату и неподвижно относительно него кольцевым упором, рабочая поверхность которого выполнена в виде витка спирали.
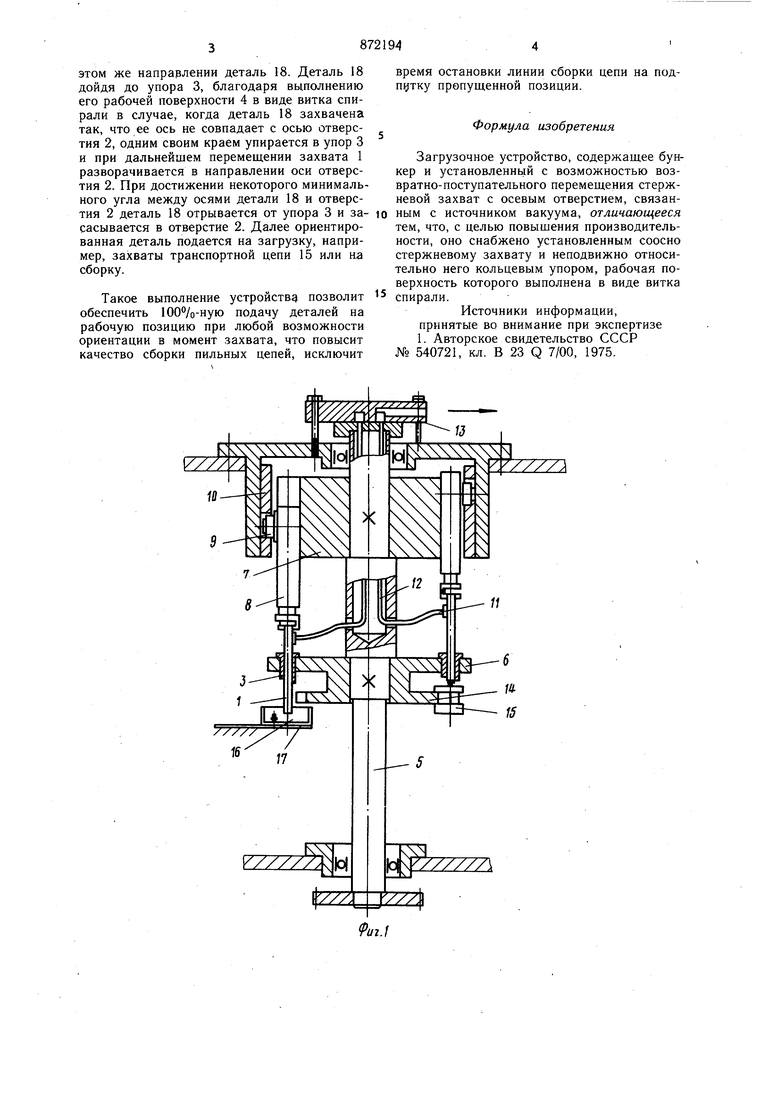
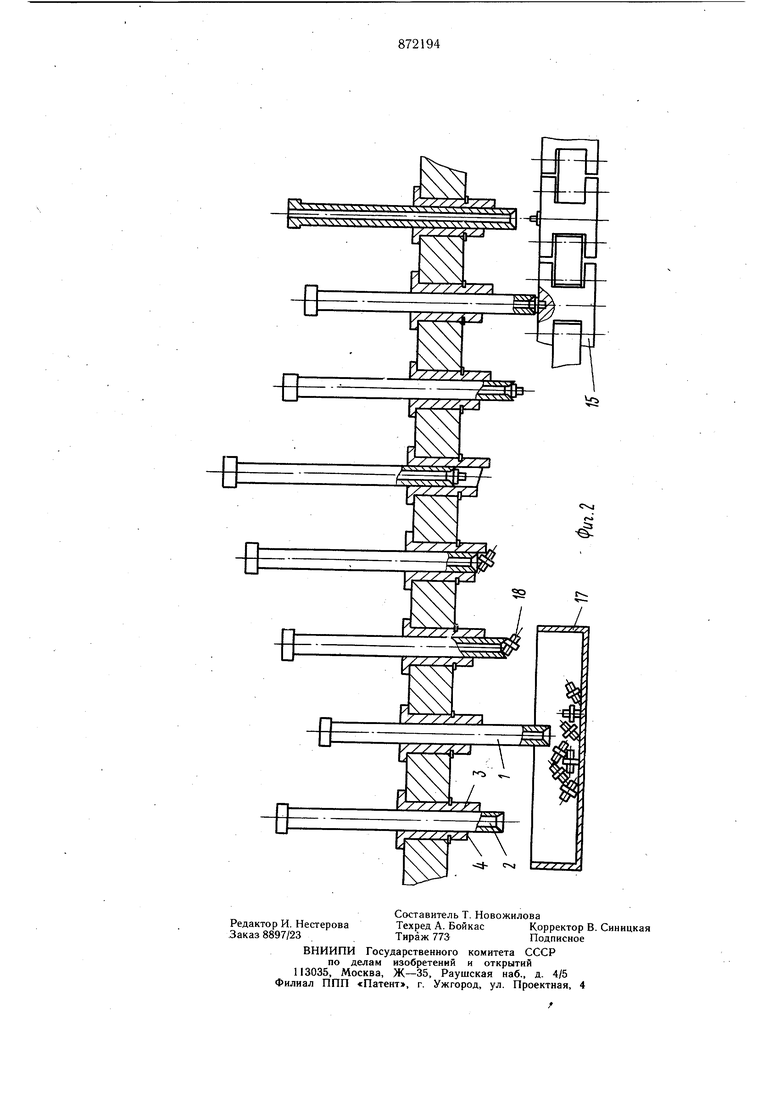
На фиг. 1. изображено загрузочное устройство, встроенное в ротор; на фиг. 2 - схема работы устройства.
Устройство состоит из стержневого захвата 1 с осевым отверстием 2, неподвижного
кольцевого упора 3 с рабочей поверхностью 4, выполненной в виде витка спирали. Данные устройства встроены в ротор загрузки, на валу 5 которого закреплен диск 6 с неподвижными упорами 3, соосными стержневым захватам 1. В барабане 7 расположены ползуны 8, которые с одной стороны через ролики 9 связаны с неподвижным копиром 10, а с другой - с захватами 1. Осевые отверстия 2 захвата 1 в свою очередь связаны через трубки 11, каналы 12 и плоский распределитель 13 с источником вакуума (не показан). На валу 5 жестко закреплена звездочка 14 для транспортной цепи 15. На станине 16 расположен бункер 17. Диаметр отверстия захвата выбирается меньше длины детали 18, но больше ее наибольшего диаметра.
15
Устройство работает следуюшим образом.
В бункере 17 навалом располагаются детали 18 (оськи пильной цепи). Осевое отверстие 2 захвата 1 связано с источником вакуума. Захват 1 под действием ползуна 8, взаи20модействующего с копиром 10, опускается в бункер 17. Деталь 18 притягивается к его торцу в любом возможном положении. Захват 1 начинает перемещаться вверх, перемещая в
этом же направлении деталь 18. Деталь 18 дойдя до упора 3, благодаря выполнению его рабочей поверхности 4 в виде витка спирали в случае, когда деталь 18 захвачена так, что ее ось не совпадает с осью отверстия 2, одним своим краем упирается в упор 3 и при дальнейшем перемещении захвата 1 разворачивается в направлении оси отверстия 2. При достижении некоторого минимального угла между осями детали 18 и отверстия 2 деталь 18 отрывается от упора 3 и засасывается в отверстие 2. Далее ориентированная деталь подается на загрузку, например, захваты транспортной цепи 15 или аа сборку.
Такое выполнение устройству позволит обеспечить 100%-ную подачу деталей на рабочую позицию при любой возможности ориентации в момент захвата, что повысит качество сборки пильных цепей, исключит
время остановки линии сборки цепи на подпртку пропущенной позиции.
Формула изобретения
Загрузочное устройство, содержащее бункер и установленньш с возможностью возвратно-поступательного перемещения стержневой захват с осевым отверстием, связанным с источником вакуума, отличаюи ееся тем, что, с целью повышения производительности, оно снабжено установленным соосно стержневому захвату и неподвижно относительно него кольцевым упором, рабочая поверхность которого выполнена в виде витка спирали.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 540721, кл. В 23 Q 7/00, 1975.
