(54) АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2003 |
|
RU2257332C1 |
| Механизм для фиксации рабочих органов захватного устройства | 1983 |
|
SU1191414A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Автоматический захват для транспортировки штучных грузов | 1980 |
|
SU872431A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| Грузозахватное устройство | 1985 |
|
SU1382802A1 |
| Грузозахватное устройство | 1987 |
|
SU1493585A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |

I , .
Изобретение относится к подъемно-транспортным средствам.
Известен автоматический захват для штучных грузов, содержаш,ий, по меньшей мере, одну пару захватных клещей, шарйирнрЗакрепленных на нижней траверсе и соединенных шарнирными тягами с верхней траверсой, и механизм фиксации захватных клещей в раскрытом положении, включающий закрепленную на нижней траверсе С1;ойку и охватывающий ее ползун, закрепленный на верхней траверсе 1 .
Однако известнь1Й захват недостаточно надежен в работе.
Цель изобретения - повышение надежности работы.
Поставленная цель достигается тем, что меха.низм фиксации каждой пары клещей снабжен валом с жёстко закрепленной на нем втулкой с буртиком, установленным подвижно в отверстиях, выполненных в CTOfikib и ползуне, одна стенка ползуна выполнена с углублением под буртик втулки, а отвррстие в стойке выполнено в виде замочной скважины.
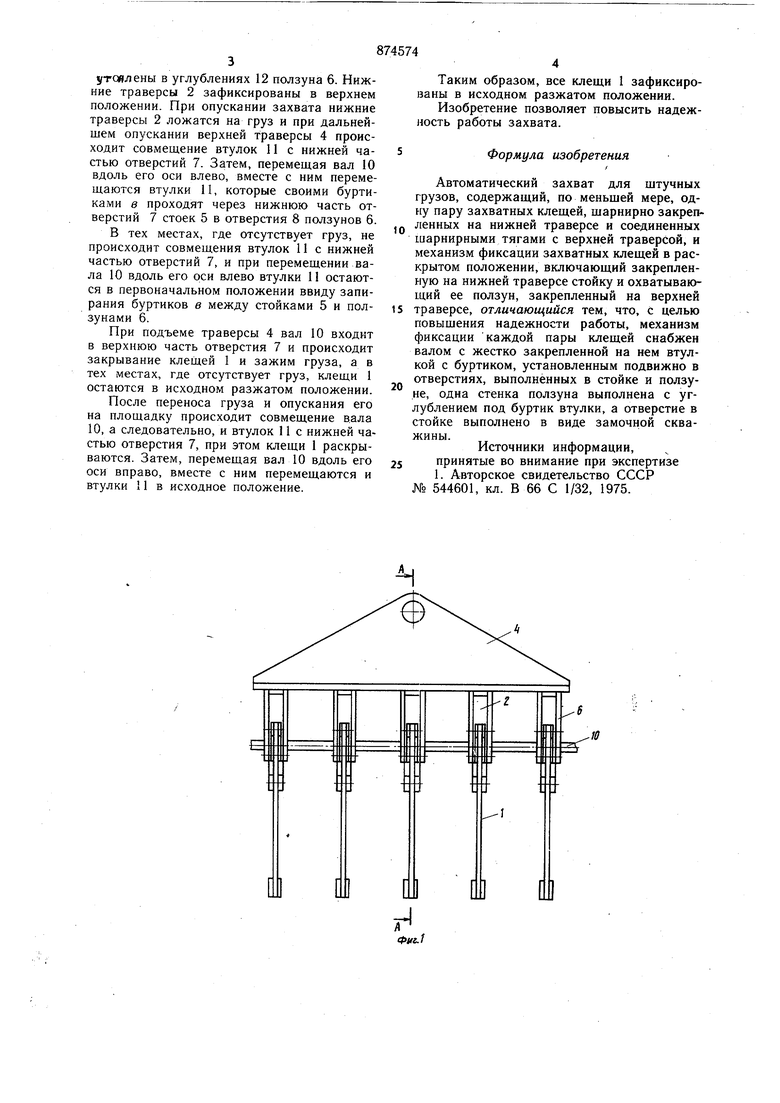
На фиг. 1 изображен предлагаемый захват, общий вид; на фиг. 2 - разрез
на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2.
.Захват содержит, по меньщей мере, одну пару захватных клещей 1, щарнирно закрепленных на нижней траверсе 2 и соединенных щарнирными тягами 3 с верхней траверсой 4, и механизм фиксации захватных клещей в раскрытом положении, который включает закрепленную на нижней траверсе 2 стойку 5 и охватывающий ее ползун 6, закрепленный на верхней траверсе 4. В стойке 5 имеfQ ется отверстие 7, выполненное в виде замочной скважины, а в ползуне 6 выполнены отверстия 8 и 9. В отверстиях стойки и ползуна подвижно установлен вал 10 с жестко закрепленной на нем втулкой 11 с буртиком 0. Одна стенка ползуна выполнена с
15 углублением 12 под буртик в. При этом диаметр отверстия 8 в стенке ползуна 6 и диаметр уижней части отверстия 7 соответствуют диаметру буртика в втулки, а ширина верхней части отверстия 7 соответствует диаметру вала 10.
Захват работает следующим образом.
В исходном разжатом положении клещей 1 втулки 11 находятся в нижней части отверстий 7 таким образом, что буртики в утоялены в углублениях 12 ползуна 6. Нижние траверсы 2 зафиксированы в верхнем положении. При опускании захвата нижние траверсы 2 ложатся на груз и при дальнейшем опускании верхней траверсы 4 происходит совмещение втулок 11 с нижней частью отверстий 7. Затем, перемещая вал 10 вдоль его оси влево, вместе с ним перемещаются втулки 11, которые своими буртиками в проходят через нижнюю часть отверстий 7 стоек 5 в отверстия 8 ползунов 6. В тех местах, где отсутствует груз, не происходит совмещения втулок 11 с нижней частью отверстий 7, и при перемещении вала 10 вдоль его оси влево втулки 11 остаются в первоначальном положении ввиду запирания буртиков в между стойками 5 и ползунами 6. При подъеме траверсы 4 вал 10 входит в верхнюю часть отверстия 7 и происходит закрывание клещей 1 и зажим груза, а в тех местах, где отсутствует груз, клещи 1 остаются в исходном разжатом положении. После переноса груза и опускания его на площадку происходит совмещение аала 10, а следовательно, и втулок 11 с нижней частью отверстия 7, при этом клещи 1 раскрываются. Затем, перемещая вал 10 вдоль его оси вправо, вместе с ним перемещаются и втулки 11 в исходное положение. Таким образом, все клещи 1 зафиксированы в исходном разжатом положении. Изобретение позволяет повысить надежность работы захвата. Формула изобретения Автоматический захват для щтучных грузов, содержащий, по меньщей мере, одну пару захватных клещей, щарнирно закрепленных на нижней траверсе и соединенных шарнирными тягами с верхней траверсой, и механизм фиксации захватных клещей в раскрытом положении, включающий закрепленную на нижней траверсе стойку и охватывающий ее ползун, закрепленный на верхней траверсе, отличающийся тем, что, с целью повыщения надежности работы, механизм фиксации каждой пары клещей снабжен валом с жестко закрепленной на нем втулкой с буртиком, установленным подвижно в отверстиях, выполненных в стойке и ползуне, одна стенка ползуна выполнена с углублением под буртик втулки, а отверстие в стойке выполнено в виде замочной скважины. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 544601, кл. В 66 С 1/32, 1975.
