(54) АВТОМАТ ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для ультразвукового контроля дисков | 1977 |
|
SU642648A1 |
| Сканирующее устройство к ультразвуковому дефектоскопу | 1981 |
|
SU1000902A1 |
| АВТОМАТ ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ДИСКОВ | 1973 |
|
SU396621A1 |
| Многопозиционный сборочный автомат | 1981 |
|
SU921760A1 |
| Сканирующее устройство для ультразвукового контроля | 1981 |
|
SU1004868A1 |
| Автоматическая поточная линия для изготовления книг | 1986 |
|
SU1426848A1 |
| Установка для сварки | 1990 |
|
SU1756084A1 |
| Устройство для выполнения рисунков | 1981 |
|
SU1134407A1 |
| Автомат для предмонтажной обработки электрических шнуров | 1988 |
|
SU1642542A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ ШВОВ ИЗДЕЛИЙ | 1991 |
|
RU2008665C1 |
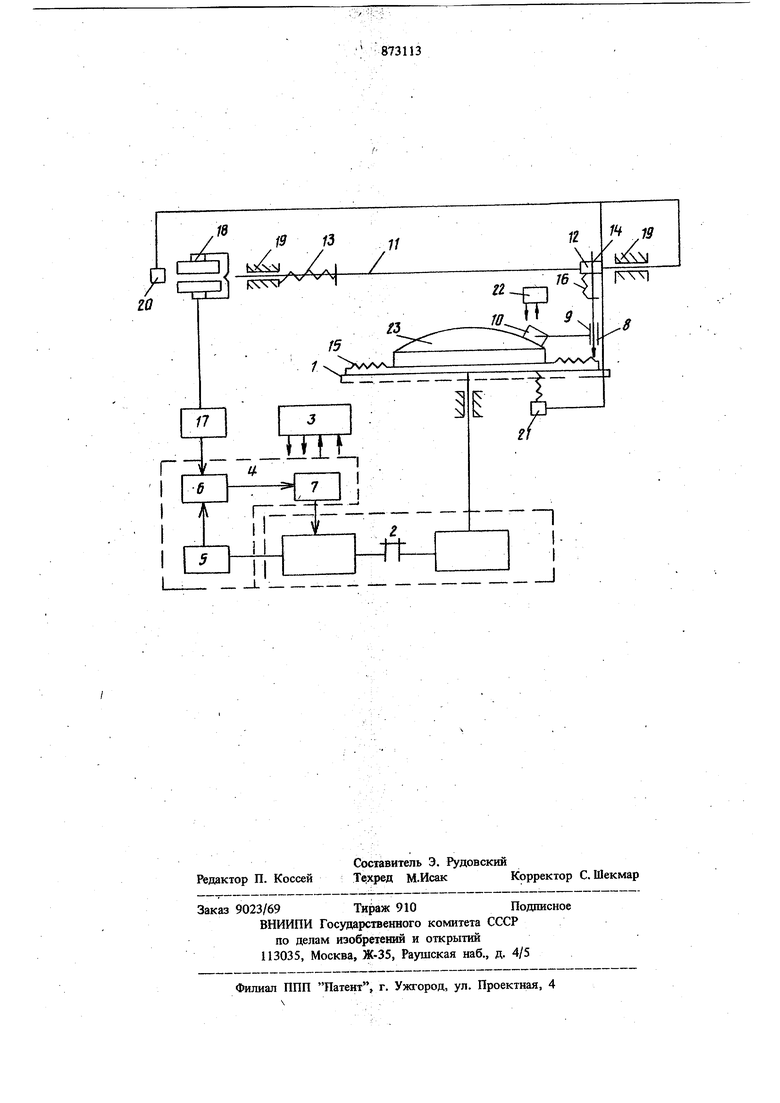
Изобретение относится к неразрушающим методам и средствам контроля и может быть использовано в машиностроении, например при дефектоскопии изделий с торцовыми поверхностями сферической формы. Известен автомат для ультразвукового контроля изделий, содержащий станину, стол с приводом вращения, блок управления скоростью вращения стола, ультразвуковой генератор, сканирующий узел с рычагом и искательной головкой,, блок индикации, подпружине1шую штаягу, копир с виде спирали и электромагнит ( Недостатком известного автомата является низкое качество контроля изделий, имеюишх торцовые поверхности сферической формы, вви ду постоянства шага испытательной головки в направлении, перпендикулярном оси вращения изделия. При сканировании происходит перепуск исти контролируемой сферической поверхности. Кроме того, недостатком является жесткое крепление искательной головки к рычагу сканирующего узла, не позволяющее оценивать при сканировании кривизну поверхности изделия. Целью изобретения является повышение качества контроля изделий со сферическими поверхностями. Указанная цель достигается тем, что стшраль копира выполнена с переменным шагом, а сканирующий узел установлен с возможностью скольжения по рычагу. На чертеже показана кинематическая схема автомата. Автомат содержит станину (не показана), на которой установлен стол 1 с приводом 2 вращения, блок 3 питания и коммутации и блок 4 управления скоростью вращения стола, включающий датчик 5 угловой скорости, блок 6 сравнения, исполнительный преобразователь 7. Автомат содержит также сканирующий узел, включающий рычаг 8, на котором установлена скользящая втулка 9 с жестко закрепленной на ней искательной головкой 10, питающий ее ультразвуковой генератор (не показан), штангу 11 с отверстием 12, размещенную параллельно поверхности стола и подпружиненную вдоль своей оси пружиной 13, электромагнит 14, закрепленный на штанге у кромки отверстия.
и копир 15 в виде спирали переменного шага, который установлен по периметру стола 1. Рычаг 8 подпружинен с помощью пружины 16 относительно штанги вдоль своей продольной оси и одним концом контактирует с отверстием 12 штанги, а вторым концом - с копиром 15, Автомат содержит датчик 17 линейного перемещеНия, соединенньш с блоком 4 и реостатом 18 Штанга 11 установлена в направляющих 19. Переключатель 20 и реостат 18 установлены вдоль направляющих 19с возможностью контактирования в процессе контроля с концом штанги И Переключатель 21 предназначен для включения электромагнита и включения привода 2 вращения стола. Выход искательной головки 10 соединен с блоком 22 индикации.. Контролируемое изделие 23 установлено на столе 1.
Автомат работает следующим образом.
Переключатель 21 выключает электромагнит 14 и включает привод 2 вращения стола. Рычаг 8 под действием пружины 16 находится в контакте со спиралью копира 15, под действием которой он перемещается, одновременно перемещая искательную головку 10 и штангу 11. Ультразвуковой генератор обеспечивает прозвучивание контролируемого изделия 23, а блок 22 индикации - регистрацию результатов контроля. Штанга 11, перемещаясь в направляющих 19, сжимает пружину 13 и перемещает ползунок реостата 18, связанный с датчиком 17. Электрические сигналы датчика 17 линейного перемещения и датчика 5 угловой скорости подаются на блок 6 сравнения. Разность этих сигналов с блока 6 поступает в исполнительный преобразователь 7 и затем на привод 2 вращения стола.
Напряжение датчика 17 определяет скорость вращения вала двигателя привода 2 и соответственно стола 1 в зависимости от положения искательной головки 10 относительно центра изделия 23. Таким образом, в автомате поддерживается постоянство скорости контроля поверхности изделия.
lio окончании контроля штанга 11 упирается в переключатель 20, который выключает питание привода 2 и включает электромагнит 14. Последний выводит из контакта искательную головку 10, сжимая при этом пружину 16, В момент выхода рычага 8 из зацепления со спиралью копира 15 пружина 13 возвращает
0 цнангу 11 в исходное положение. После установки на копир 15 следующего изделия переключатель 21 отключает электромагнит .14, а пружина 16 вводит рычаг 8 в контакт со спиралью копира 15, и вместе с тем искательную
, головку 10 в рабочее положение, цикл повто-, ряется.
Использование предложенного автомата повьь шает качество контроля изделий со сферическими поверхностями за счет обеспечения сканирова1шя всей поверхности, что приведет к повышению надежности и долговечности изделий в эксгшуатации.
Ф о рмулаизобретения
Автомат для ультразвукового контроля изделий, содержащий станину, стол с приводом враще1шя, блок управления скоростью вращения стола, ультразвуковой генератор, сканирующий узел с рычагом и искательной головкой, блок индикации, подпружиненную штангу, копир в виде спирали и электромагнит, о т л ичающийся тем, что, с целью повышения качества контроля изделий со сферическими поверхностями, спираль копира выполнена . с перемешым шагом, а ска1шрзтощий узел установлен с возможностью скольжения по рычагуИсточники информации,
принятые во BHHMaiffle при экспертизе
1, Авторское свидетельство СССР № 642648, кл. G 01 N 29/04, 1977.
