(54) СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ ЛЕТУЧИХ НОЖНИЦ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления мерным резом проката | 1980 |
|
SU927422A1 |
| Система управления приводом летучих ножниц | 1977 |
|
SU778956A1 |
| Система управления приводом летучих ножниц | 1987 |
|
SU1523269A1 |
| Система управления приводом летучих ножниц | 1977 |
|
SU746418A1 |
| Система управления приводом летучих ножниц | 1984 |
|
SU1260121A1 |
| Способ управления приводом летучих ножниц и устройство для его осуществления | 1990 |
|
SU1764865A1 |
| Цифровое устройство управления летучими ножницами (его варианты) | 1983 |
|
SU1156871A1 |
| Система управления электроприводом летучих ножниц | 1986 |
|
SU1433657A1 |
| Устройство управления летучими ножницами | 1975 |
|
SU545400A1 |
| Устройство управления летучими ножницами | 1986 |
|
SU1470473A1 |

f
Изобретение относится к автоматаэации металлургического производства и может быть использовано для управления автоматизированным электродри- водом летучих ножниц.
Известна система управления приводим летучих ножниц, содержащая задатчик мерных длин, цифроангшоговый позиционный регулятор и блок.синусоидального управления. Эта система управле- кия реализует синусоидальную диаграмму скорости 1 .
Недостатком ее является то, что при отрезании мерных длин, когда прнвод ножниц работает с остановами в 15 интервалах между рядами, увеличиваются электрические потери в двигателе, что увеличивает его нагрев и снижает нгщежность работы.
Цель изобретения - повшиение Hai- 24 дежности работы за счет обеспечения возможности снижения нагрева привода.
Поставленная цель достигается тем, что система управления приводом лету- чих ножниц, содержащая задатчик ных длин, цифроаналоговый позиадонный регулятор и блок синусоидального управления, снабжена ограничителем длины, вход которого электрически . соединен с задатчиком мерных длин, 30
а аналоговьШ и цифровой выходы соответственно, с аналоговым и первым цифровым входами блока синусоидсшьного управления, при этом второй цифровой вход блока синусоидального .управления электрически соединен с выходом цифроаналогового позиционного регул ятора.
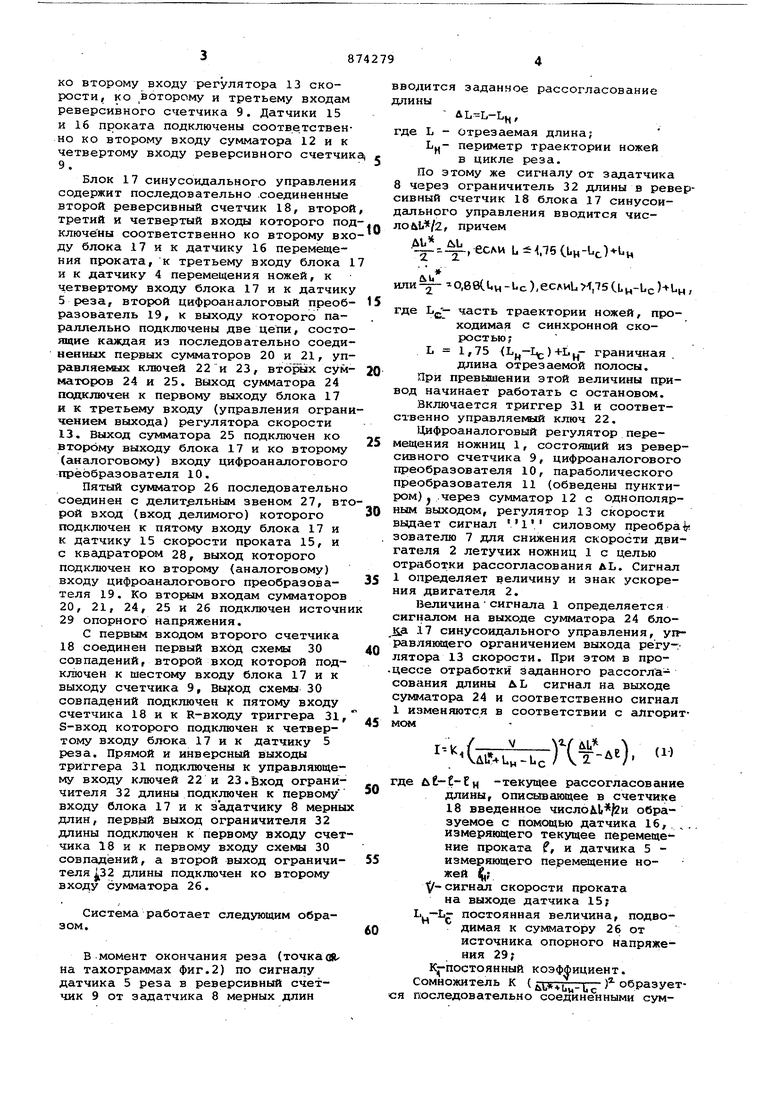
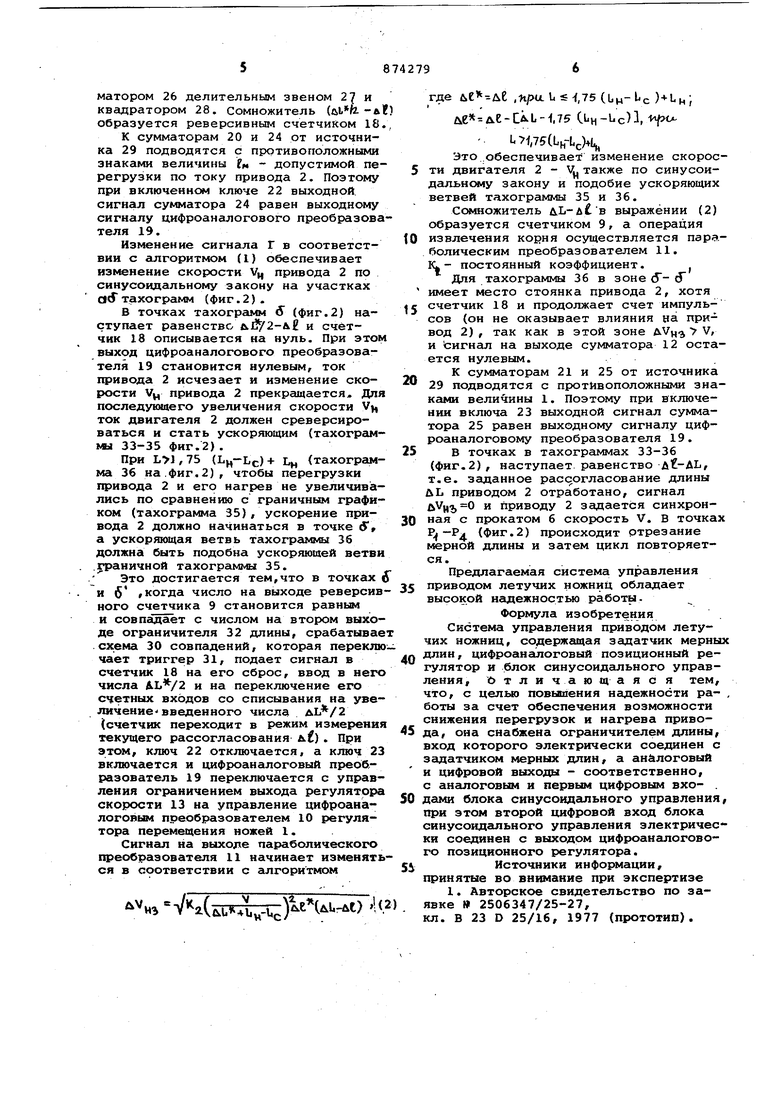
На фиг.1 приведена блок-схема системы; на фиг.2 - тахограммы работы системы.
Летучие ножницы 1 с. двигателем 2 и датчиками скорости 3 ножей, перемещения 4 ножей и реза 5 обеспечивают порезку на мерн1 е длины движущегося проката 6. {Двигатель 2 подключен к силовому преобразователю 7, который управляется от последовательно соединенных задатчика 8 мерных длии, реверсивного счетчика 9, цифроаналогового преобразователя 10, параболического преобразователя 11, сумматора 12 с однополярным выходом, регулятора 13 скорости, выход которого подключен ко входу силового преобразователя 7. С прокатом 6 связаны следующие ролики 14, на валу котосжш: установлены датчики скорости 15 и перемещения 16 проката 6. Датчики Зг 5 ножей подключены соответственно ко второму входу регулятора 13 скорости, ко воторому и третьему входам реверсивного счетчика 9. Датчики 15 и 16 проката подключены соотве.тствен но ко второму входу сумматора 12 и к четвертому входу реверсивного счетчик 9. Блок 17 синусоидального управлени содержит последовательно .соединенные второй реверсивный счетчик 18, второ третий и четвертый входы которого под ключены соответственно ко второму вх ду блока 17 и к датчику 16 перемещения проката, к третьему входу блока и к датчику 4 перемещения ножей, к четвертому входу блока 17 и к датчик 5 реза, второй цифроаналоговый преоб разователь 19, к выходу которого параллельно подключены две цепи, состо ящие каждая из последовательно соеди ненных первых сумматоров 20 и 21, уп равляемых ключей 22и 23, вторых сум маторов 24 и 25. выход сумматора 24 подключен к первому выходу блока 17 и к третьему входу (управления огран чением выхода) регулятора скорости 13, Выход сумматора 25 подключен ко второму выходу блока 17 и ко второму (аналоговому) входу цифроаналогового преобразователя 10. Пятый сумматор 26 последовательно соединен с делит льньол звеном 27, вт рой вход (вход делимого) которого подключен к пятому входу блока 17 и к датчику 15 скорости проката 15, и с квадратором 28, выход которого подключен ко второму (аналоговому) входу цифроаналогового преобразователя 19. Ко вторым входам сумматоров 20, 21, 24, 25 и 26 подключен источн 29 опорного напряжения. С первым входом второго счетчика 18 соединен первый вход схемы 30 совпадений, второй вход которой подключен к шестому входу блока 17 и к выходу счетчика 9, схемы 30 совпадений подключен к пятому входу счетчика 18 и к R-входу триггера 31, S-вход которого подключен к четвертому входу блока 17 и к датчику 5 реза. Прямой и инверсный выходы триггера 31 подключены к управляющему входу ключей 22 и 23.вход ограничителя 32 длины подключен к первому входу блока 17 и к задатчику 8 мерны длин, первый выход ограничителя 32 длины подключен к первому входу счет чика 18 и к первому входу схемы 30 совпадений, а второй выход ограничителя 132 длины подключен ко второму входу сумматора 26. Система работает следующим образом. В-момент окончания реза (точкао на тахограммах фиг.2) по сигналу датчика 5 реза в реверсивный счетчик 9 от задатчика 8 мерных длин водится заданное рассогласование лины - , где L - Отрезаемая длина; периметр траектории ножей в цикле реза. По этому же сигналу от задатчика 8 через ограничитель 32 длины в реверсивный счетчик 18 блока 17 синусоидального управления вводится числойЬ /2, причем ..,есАи LiU5Ci.H-bc) О,68(.14ц-Ьс),есАиЬМ,75СЬц-Ьс)--1н/ где Lgjj- часть траектории ножей, проходимая с синхронной скоростью;L 1,75 (Ьц-I) граничная длина отрезаемой полосы. При превышении этой величины привод начинает работать с остановом. Включается триггер 31 и соответственно управляе1 ый ключ 22. Цифроаналоговый регулятор перемещения ножниц 1, состоящий из реверсивного счетчика 9, цифроаналогового преобразователя 10, параболического преобразователя 11 (обведены пунктиром) j, через сумматор 12 с однополярным выходом, регулятор 13 скорости силовому преобра выдает сигнал зователю 7 для снижения скорости двигателя 2 летучих ножниц 1 с целью отработки рассогласования дЬ. Сигнал 1 определяет величину и знак ускорения двигателя 2. Величинасигнала 1 определяется сигналом на выходе сумматора 24 блоiS.a .17 синусоидального управления, управлянадего органичением выхода регу-:лятора 13 скорости. При зтом в процессе отработки заданного рассогласования длины AL сигнал на выходе сумматора 24 и соответственно сигнал 1 изменяются в соответствии с алгоритмом.(is;e)4f-). где t t-t-f -текущее рассогласование длины, описывающее в счетчике 18 введенное числоА. образуемое с помощью датчика 16, , . измерякнцего текущее перемещение проката f, и датчика 5 измеряющего перемещение ножей ; сигнёш скорости проката на выходе датчика IS; Ьц-L- постоянная величина, подводимая к сумматору 26 от источника опорного напряжения 29; К-постоянный коэффициент. Сомножитель к (а -;ьц-1с ) образуется последовательно соединенными сумматором 26 делительным звеном 27 и квадратором 28. Сомножитель ( -лС образуется реверсивным счетчиком 18.
К сумматорам 20 и 24 от источника 29 подводятся с противоположными знаками величины 1н - допустимой перегрузки по току привода 2. Поэтому при включенном ключе 22 выходной сигнал сумматора 24 равен выходному сигналу цифроаналогового преобразователя 19.
Изменение сигнаша Г в соответствии с алгоритмом (1) обеспечивает изменение скорости Уц привода 2 по синусоидальному закону на участках сиГ тахограмм {фиг.2).
В точках тахограмм S (фиг.2) наступает равенство ь.йУ2-л и счётчик 18 описывается на нуль. При этом выход цифроаналогового преобразователя 19 становится нулевым, ток привода 2 исчезает и изменение скорости V привода 2 прекращается. Для последующего увеличения скорости Уц ток двигателя 2 должен среверсироваться и стать ускоряющим (тахогргш- мы 33-35 фиг.2).
При ,75 (Ьц-LC)+ L (тахограмма 36 на.фиг.2), чтобы перегрузки привода 2 и его нагрев не увеличивались по сравнению с граничным графиком (тахограмма 35), ускорение привода 2 должно начинаться в точке dr а ускоряющая ветвь тахограммы 36 должна быть подобна ускоряющей ветви .граничной тахограммы 35. достигается тем,что в точках о и б ,когда число на выходе реверсивного счетчика 9 становится равным и совпадает с числом на втором выходе ограничителя 32 длины, срабатывае .схема 30 совпадений, которая переклю чает триггер 31, подает сигнал в счетчик 18 на его сброс, ввод в него числа Д. и на переключение его счетных входов со списывания на увеличение введенного числа (счетчик переходит в режим измерения текущего рассогласования л). При этом, ключ 22 отключается, а ключ 23 включается и циФроаналоговый преоб.разователь 19 переключается с управления ограничением выхода регулятора скорости 13 на управление цифроаналоговым преобразователем 10 регулятора перемещения ножей 1.
Сигнал на выходе параболического преобразователя 11 начинает изменяться в соответствии с гшгоритмом
Иг (,. 1(.2
Н W
где ,. U -(,75 (Ьц-Ьс )-«-LM; де ле-Сй 1-1,75 Сьн-Ьс)3, f
(Lh-Lc4
Это .обеспечивает изменение скорости двигателя 2 - Уц также по синусоидальному закону и подобие ускоряющих ветвей тахограммы 35 и 36.
Сомножитель дЬ-дСв выражении (2) образуется счетчиком 9, а операция o извлечения корня осуществляется параболическим преобразователем 11. К1 - постоянный коэффициент. Для тахограи мы 36 в зоне (Г имеет место стоянка привода 2, хотя с счетчик 18 и продолжает счет импульсов (он не оказывает влияния на привод 2) , так как в этой зоне ДУц-а V, и сигнал на выходе сумматора 12 остается нулевым.
К сумматорам 21 и 25 от источника
0 29 подводятся с противоположными знаками величины 1. Поэтому при включении включа 23 выходной сигнал сумматора 25 равен выходному сигналу цифроаналоговому преобразователя 19. 5 в точках в тахограммах 33-36
(фиг.2), наступает равенство , т.е. заданное рассогласование длины ДЬ приводом 2 отработано, сигнал и приводу 2 задается синхронная с прокатом 6 скорость У. В точках (фиг.2) происходит отрезание мерной длины и затем цикл повторяется.
Предлагаемая система управления 5 приводом летучих ножниЦ обладает высокой нёщежностью работы.
Формула изобретения Система управления приводом летучих ножниц, содержащая задатчик мерных 0 длин, циФроаналоговый позиционный регулятор и блок синусоидального управления. Отличающая с я тем, что, с целью повипения нгщежности ра- , боты за счет обеспечения возможности снижения перегрузок и нагрева привода, она снабжена ограиичителем длины, вход которого электрически соедииен с Зсщатчиком мерных длин, а аналоговый и цифровой выходы - соответственно, с аналоговым и первым цифровым вхо- . 0 дами блока синусоидального управления, при этом второй цифровой вход блока синусоидального упргшления электрически соединен с выходом цифроаналогового позиционного регулятора. 5 Источники информации,
принятые во внимание при экспертизе
v14
-«.
