(54) ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1979 |
|
SU874331A2 |
| Исполнительный орган манипулятора | 1982 |
|
SU1036525A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ИНОРОДНЫХ ТЕЛ ИЗ ПОЛЫХ ОРГАНОВ "ТРАЛ" (ВАРИАНТЫ) | 1998 |
|
RU2145488C1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1033306A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1172696A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1283100A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1094733A1 |
| Привод поворота исполнительного органа | 1980 |
|
SU975384A1 |
| Рука манипулятора | 1983 |
|
SU1121132A2 |
1
Изобретение относится к области .машино строения, а в частности к манипуляторам для механизации технологических процессов, содержащих подъемно-транспортные и другие операции.
Известен исполнительный орган манипулятора, содержащий основание, звенья, шарнирно-связанные между собой при помощи приводов, и захват 1.
Недостатком исполнительного органа является сложность конструкции и трудоемкость изготовления щарнирных соединений звеньев.
Цель изобретения - упрощение конструкции и технологичности.
Для этого звенья манипулятора выполнены в виде трубчатых элементов с торцами, скощенными в противоположные стороны относительно их оси, при этом оси приводов перпендикулярны к торцам звеньев, которые могут быть выполнены в виде круговых и э/ липтических цилиндров, в виде усеченных конусов и усеченных эллиптических конусов, при этом торцы смежных трубчатых элементов имеют одинаковые поверхности, а приводы выполнены в виде моментных двигателей.
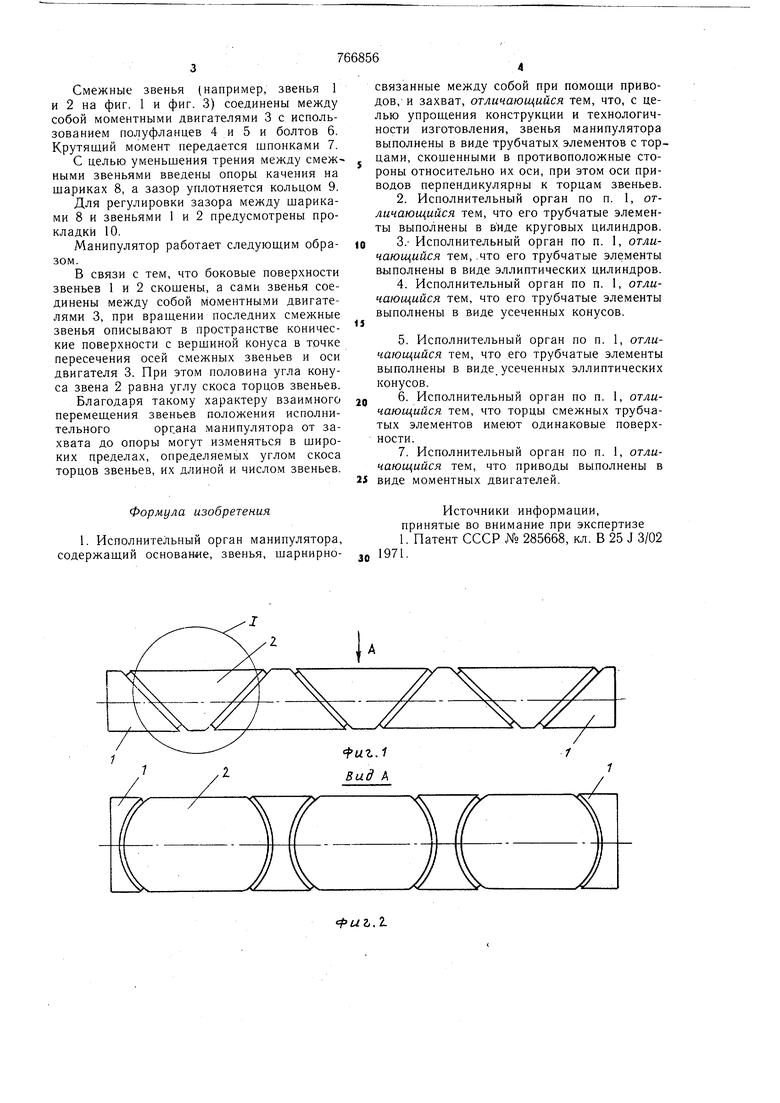
На фиг. 1 представлен общий вид исполнительного органа манипулятора; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - вид по стрелке Б на фиг. 3; на фиг. 5 - вариант выполнения исполнительного органа, собранного из конусов.
Исполнительный орган манипулятора содержит два концевых звена 1 (фиг. I), одно из которых соединено с основанием, а другое - с захватом (не показаны).
Между концевыми звеньями 1 размещеtoны промежуточные звенья 2 в виде трубчатых элементов. Торцы соприкасающихся звеньев скошены в противоположные стороны относительно звеньев.
Наружные поверхности звеньев могут
15 быть выполнены различной формы.
Для небольших углов скоса рационально применение кругового цилиндра, а для больших углов скоса (от 30° и более) эллиптического цилиндра, причем эксцентриситет эллипса выбирается таким, чтобы при необходимом угле скоса в сечении получить форму, близкую к окружности. В этом случае улучшаются условия компоновки манипулятора.
Смежные звенья (например, звенья 1 и 2 на фиг. 1 и фиг. 3) соединены между собой моментными двигателями 3 с использованием полуфланцев 4 и 5 и болтов 6. Крутящий момент передается шпонками 7.
С целью уменьшения трения между смежными звеньями введены опоры качения на шариках 8, а зазор уплотняется кольцом 9.
Для регулировки зазора между шариками 8 и звеньями 1 и 2 предусмотрены прокладки 10.
Манипулятор работает следующим образом.
В связи с тем, что боковые поверхности звеньев 1 и 2 скошены, а сами звенья соединены между собой моментными двигателями 3, при вращении последних смежные звенья описывают в пространстве конические поверхности с вершиной конуса в точке пересечения осей смежных звеньев и оси двигателя 3. При этом половина угла конуса звена 2 равна углу скоса торцов звеньев.
Благодаря такому характеру взаимного перемещения звеньев положения исполнительногоорг.ана манипулятора от захвата до опоры могут изменяться в широких пределах, определяемых углом скоса торцов звеньев, их длиной и числом звеньев.
Формула изобретения
J виде моментных двигателей.
Источники информации, принятые во внимание при экспертизе 1. Патент СССР № 285668, кл. В 25 J 3/02 0 1971.
