(54) УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВАНИЯ ТКАНИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления центрированием ткани | 1988 |
|
SU1601246A1 |
| Способ устранения перекоса ткани на сушильно-ширильной машине | 1980 |
|
SU1006558A1 |
| Устройство для равнения кромки ленточного материала | 1989 |
|
SU1728107A1 |
| Машина для ширения и сушки текстильного полотна | 1983 |
|
SU1121336A1 |
| Устройство для загибки и склеивания длинномерных изделий | 1986 |
|
SU1340730A1 |
| Устройство для равнения кромки движущегося материала | 1989 |
|
SU1669837A1 |
| Приспособление для центрирования ткани отделочных машин текстильного производства | 1977 |
|
SU742507A1 |
| Устройство для управления манипуляторными линейками реверсивного прокатного стана | 1984 |
|
SU1217512A1 |
| Устройство для равнения кромки текстильных полотен при их фрикционной размотке или намотке | 1989 |
|
SU1773834A1 |
| ТКАЦКИЙ СТАНОК | 1970 |
|
SU263521A1 |
1
Изобретение относится к отделочному оборудованию текстильной промышленности, конкретнее к центрирующим устройствам, обеспечивающим стабилизацию положения оси движущейся ткани.
Известно устройство для центрирования ткани, содержащее две пайл тканенаправляющих роликов с двумя датчиками положения кромок материала, два исполнительных механизма, каждый из которых кинематически связан с соответствующей парой тканенатфавляющих роликов, реверсивный привод поперечного перемещения обеих пар тканенаправляющих роликов, механизм исправления перекоса ткани с приводом и блок управления 1.
Основной недостаток известного устройства - невысокая точности центрирования ткани, обусловленная тем, что в устройстве только один датчик положения кромки ткани используется для контроля ширины ткани.
Цель изобретения - повышение точности центрирования ткани.
Поставленная цель достигается благодаря тому, что блок управления состоит из четырех элементов ЗКЩРТИ КА, двух элементов ИЛИ, трех элементов и, двух элементов ЗАПРЕТ, элемента НЕ-ИЛИ;и элемента НЕ-И, при этом выходы датчиков положения кромок ткани связаны со входами первого элемента ИЛИ, элемента НЕ-И и элемента НЕ-ИЛИ, выход первого элемента ИЛИ через первый элемент ЗАДЕРЖКА соединен с первыми входами обоих элементов ЗАПРЕТ и с первым входом первого
10 элемента И, выход элемента НЕ-И через второй элемент ЗАДЕРЖКА подключен ко вторым входам обоих элементов ЗАПРЕТ и ко второму входу первого элемента И, выход которого связан с первыми входами второго и третьего элементов И, и через третий элемент ЗАДЕРЖКА с первым входом второго элемента ИЛИ, второй вход которого через четвертый элемент ЗАДЕРЖКА и элемент
20 НЕ-ИЛИ связан с обоими датчиками положения кромок ткани, причем выход первого датчика положения.кромки ткани соединен со .вторым входом третьего элемента И, выход которого подклю25чен к первому входу привода механизма исправления перекоса ткани, выход второго датчика положения кромки ткани соединен со вторым входом второго элемента И, выход которого подключен
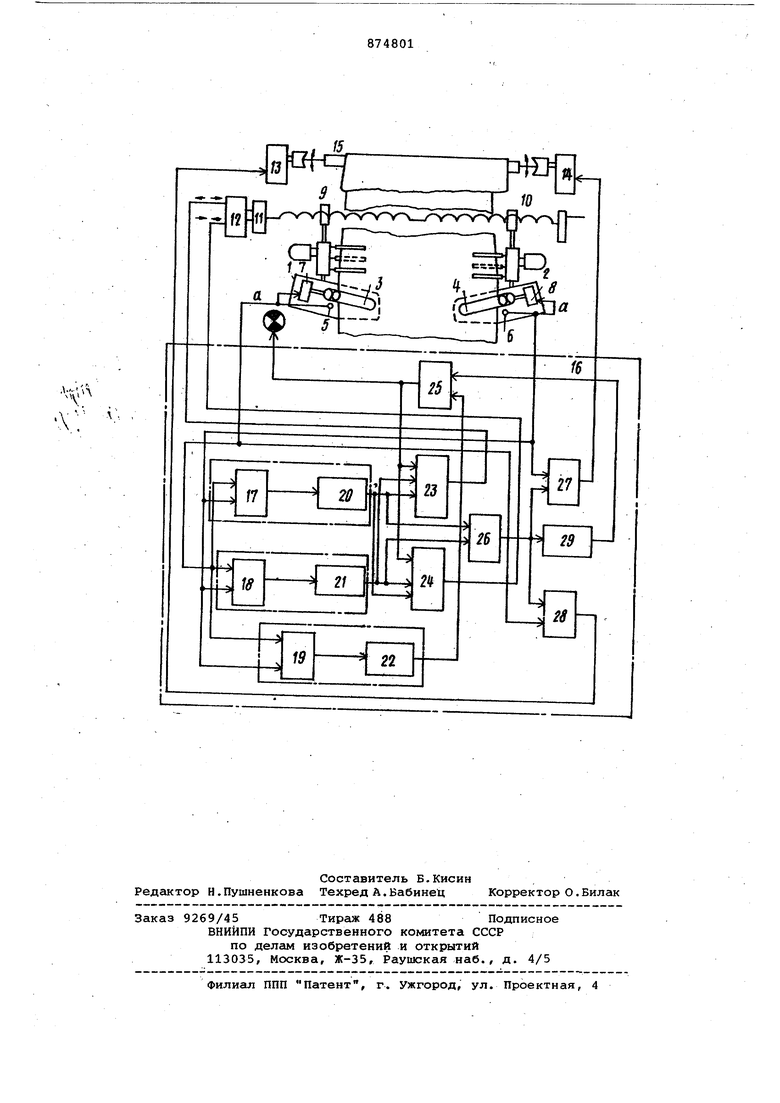
30 ко второму входу привода механизма исправления перекоса ткани, выходы обоих элементов ЗАПРЕТ соединены со входами реверсивного привода попереч ного перемещения обеих пар тканенап авпяющкх роликов, второго элемента ИЛИ подключен к третьим вхо дам обоих элементов ЗАПРЕТ. На чертеже представлена блок-схема устройства. Устройство состоит из двух головок 1 и 2, каждая из которых включает пару тканенаправляющих роликов 3 и 4, датчики 5 и 6 положения кромки ткани и исполнительные механизмы 7 и 8, Две пары винт-гайка 9 и 10 кинема тически связаны с головками 1 и 2 и через редуктор 11 - с реверсивным приводом 12 поперечного перемещения обеих пар тканенаправляющих роликов. Приводы 13 и 14 механизма 15 исправления перекоса ткани связаны с выходом блока 16 управления. Блок 16 управления включает элемент ИЛИ 17, элемент НЕ-И 18 и элемент НЕ-ИЛИ 19, входы которых связаны с.выходами датчиков 5 и б. Выходы элементов 17,18 и 19 соответственно через элементы ЗАДЕРЖКА 20,21 и 22 соединены с элементами ЗАПРЕТ 23, 24 и элементом ИЛИ 25. В свою очередь, выходы элементов ЗАПРЕТ подключены к реверсивному приводу 12. В блок 16 управления входят также элементы И 26,27, 28 и элемент ЗАДЕР ЖКА 29, при этом выходы элементов ЗАДЕРЖКА 20 и 21 через элемент И 26 и элемент ЗАДЕРЖКА ,29 подключены к элементу ИЛИ 29, выход которого соединен со вводами элементов ЗАПРЕТ 23 и 24. Выходы датчиков 5 и 6 соединены соответственно со входами элементов И 28 и 27, выходы которых связаны с приводами 13 и 14 механизма 15. Центрирующее устройство работает следующим образом. При включении устройства в работу сразу возникает ситуация отсутствия сигналов с датчиков 5 и 6 одновремен но. В результате на выходе Логического элемента НЕ-И 18 появляется еди ничный сигнал. Спустя определенное время, задаваемое элементом ЗАДЕРЖКА 21, на выходе элемента ЗАПРЕТ 24 фор мируётся также единичный сигнал, который, воздействуя на реверсивный привод 12, сводит головки 1 и 2, а, следовательно, и тканенаправляющие ролики 3 и 4. Головки 1 и 2 двигаются навстречу друг другу до тех пор, пока кромки ткани не окажутся в зоне действия датчиков 5 и 6. В случае, если обе кромки за время, определяемое элементом ЗАДЕРЖКА 22 (при отсутствии сигналов с датчиков 5 и 6 на выходе элемента НЕ-ИЛИ 19 имеет место логическая единица), не попадут в зону действия датчиков 5 и 6, на выходе элемента ИЛИ 25 фор мируётся сигнал, который выдает сигнал Авария и закрывает элекюнт ЗАПРЕТ 24. Привод 12 отключается и сведение головок 1 и 2 прекращается. Если в силу каких-либо обстоятельств расстояние между датчиками 5 и 6 окажется июньше ширины ткани, на выходе элемента ИЛИ 17 появляется логическая единица. При этом, если на выходе логических элементов НЕ-И 18 и ЗАДЕРЖКА 21 не появляется единичный сигнал; спустя определенное время, задаваемое элементом ЗАДЕРЖКА 20, на выходе элемента ЗАПРЕТ 23 формируется сигнал, который, воздействуя на привод 1.2, разводит головки 1 и 2. Критерием оптимальной работы устройства является режим, при котором кромки ткани попадгиот и исчезают из зоны действия датчиков на время, не превышающее время, установленное элементами ЗАДЕРЖКА 20 и 21. В этом режиме тканенаправляющие ролики 3 и 4 занимают фиксированное положение, а незначительное смещение ткани в ту или иную сторону компенсируется за счет прижатия ткани роликами той головки, фотодатчик которой в данный момент не имеет в своей зон« ткани. При этом ткань испытывает силу, пропорциональную величине угла, образованного между кромкой и осью роликов и направленную в сторону этой головки. При значительном смещении ткани, когда один из датчиков фиксирует наличие ткани в течение времени, превышающем время, установленное элементом 20, а другой ни разу не зафиксировал кромку за время, установленное элементом 21, появляются единицы, соответствующие командам сведение и разведение, которые взаимоблокируются через элементы 23 и 24 и одновременно поступают на элемент И 26, который своим выходом снимает запрет с элементов И 27 и 28 через которые вырабатываются команды управления на привод 13 (14) механизма 15 исправления перекоса ткани. Если за.время, установленное элементом ЗАДЕРЖКА 29, ткань не примет нормального положения и не запустит привода разводного приспособления, с элементом ИЛИ 25 будет вырабатываться сигнал Авария. При сигнале Авария предусматривается остановка оборудования. Предложенное устройство обеспечивает высокую точность центрирования ткани на больших скоростях и уменьшение потерь от брака из-за вылетов ткани из тканенаправителя, жгучения, неисправим перекосов ткани на выходе в тканенаправитель, складывания и перехлестов ткани. Формула изобретения Устройство для центрирования ткани, содержащее две пары тканенаправяющих роликов с двумя датчиками полоения кромок материала, два исполнительных механизма, кё1ждый из которых кинематически связан с соответствующей парой тканенаправляющих роликов, реверсивный привод поперечного пере- , мещения обеих пар тканенаправляющих роликов, механизм направления перекоса ткани с приводом и блок управления, отличающееся тем, что, с целью повышения точности цен- . трирования ткани, блок управления. состоит из четырех элементов ЗАДЩРЖКА, двух элементов ИЛИ, трех элементов И, двух элементов ЗАПРЕТ, элемента НЕ-КЛИ и элемента НЕ-И, при этом выходы датчиков положения кромок тка- 15 ни связаны со входами первого элемента ИЛИ, элемента НЕ-И и элемента НЕИЛИ, выход первогоэлемента ИЛИ через первый элемент ЗАДЕРЖКА соединен с первыми входами обоих элементов 20 ЗАПРЕТ и с первьни входом первого элемента И, выход элемента НЕ-И через второй элемент ЗАДЕРЖКА подключен ко вторым входам обоих элементов ЗАПРЕТ и ко второму входу первого элемента 25 И, выход которого связан с первыми входами второго и третьего элементов
И и через третий элемент ЗАДЕРЖКА с первым входом второго элемента ИЛИ, второй вход которого через четвертый элемент ЗАДЕРЖКА и элемент НЕ-ИЛИ связан с обоими датчиками положения кромок ткани, причем выход первого датчика положения кромки ткани соединен со вторым входом третьего элемента И, выход которого подключен к первому входу привода механизма исправления перекоса ткани,выход второго датчика положения кромки ткани соединен со вторым входом второго элемента И, выход которого подключен ко второму входу привода механизма исправления перекоса ткани,выходы обоих элементов ЗАПРЕТ соединены со входами реверсивного привода поперечного перемещения обеих пар тканенаправляющих роликов, а выход второго элемента ИЛИ подключен к третьим входам обоих элементов ЗАПРЕТ.
Источники информации, принятые во внимание при экспертизе
..i4
Vy
л , ,
