(54) АВТООПЕРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Автооператор | 1977 |
|
SU632547A1 |
| Автооператор | 1973 |
|
SU446358A1 |
| Автооператор | 1979 |
|
SU837755A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| СТАНОК ДЛЯ СУПЕРФИНИШНОЙ ОБРАБОТКИ КОЛЕЦ | 1992 |
|
RU2033916C1 |
| Устройство автоматической смены инструментов многоцелевого станка | 1987 |
|
SU1484568A1 |
| Портальный станок с автоматической сменой инструмента | 1988 |
|
SU1558629A1 |
1
Изобретение относится к станкостроению, в частности к устройствам для транспортировки заготовок и изделий из зоны обработки на транспортер и наоборот.
Известен автооператор, содержащий каретку, перемещающуюся по направляющим и несущую корпуса механизмов захватов, а также силовые цилиндры перемещения захватов I.
Недостатком известного устройства является то, что каретка перемещает по направляющим два гидропривода с коммуникациями и контролирующей аппаратурой, что делает каретку и направляющие громЪздкими. Кроме того, чтобы регулировать подачу заготовок и изделий на разные уровни, требуются специальные устройства.
Цель изобретения - упрощение конструкций и уменьщение габаритов.
Поставленная цель достигается тем, что автооператор снабжен линейкой, смонтированной на направляющих, и роликами, установленными на механизмах захватов, в корпусах этих захватов выполнены Т-образные пазы, а в щтоках силовых цилиндров - проточки, причем ролики кииематически связаны с линейками, а силовые
цилиндры жестко установлены на направляющих.
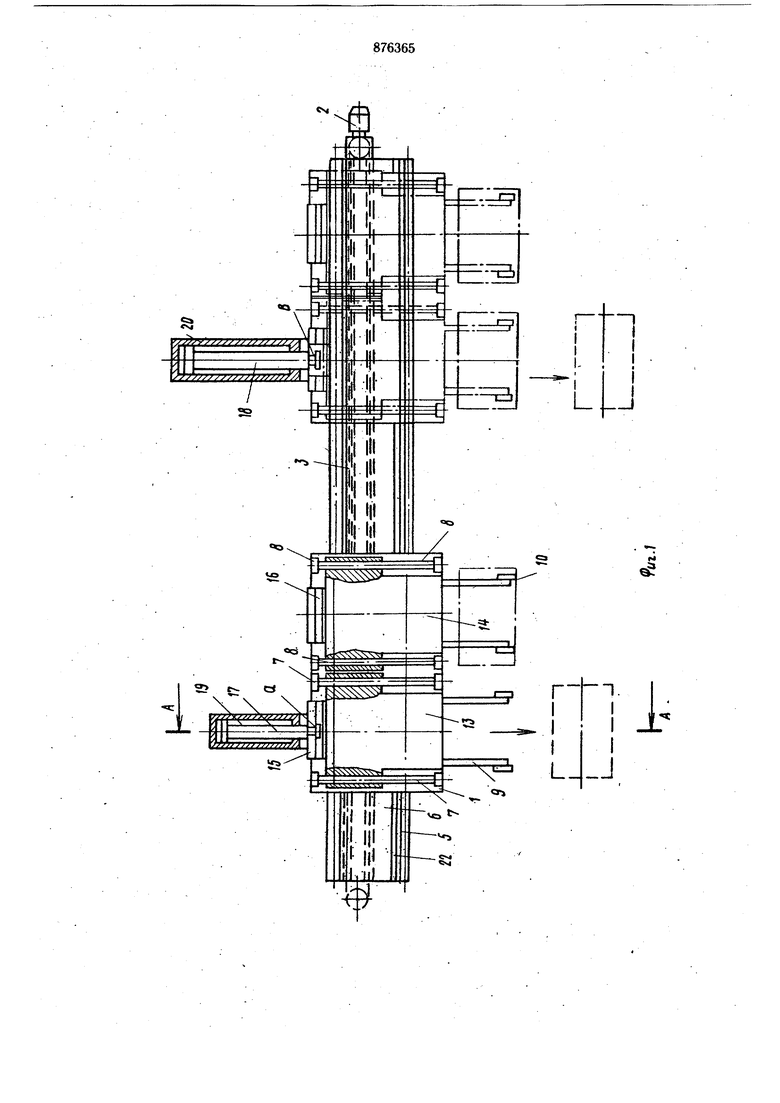
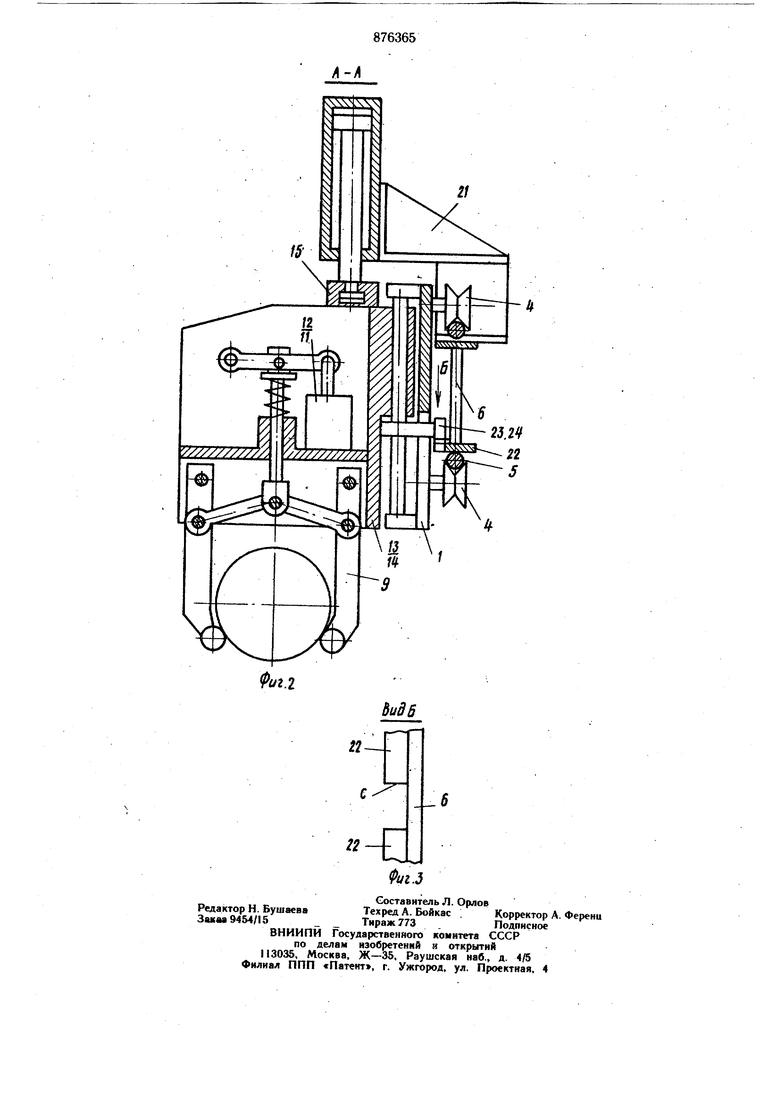
На фиг. 1 изображен автооператор, общий вид; на фиг. 2 -: разрез А-А на фиг. I; на фиг. 3 - вид Б на фиг. 2.
Автооператор содержит каретку 1, перемещающуюся посредством гидропривода 2 и цепной передачи 3 на катках 4 по направляющим 5, закрепленным на швеллере 6. На каретке 1 закреплены две пары вертикальных скалок 7 и 8, по которым перемещаются механизмы захвата заготовок и из10делий с механическими руками 9 и 10 и механизмами 11 и 12 фиксации. На корпусах захватов 13 и 14 выполнены Т-образные пазы 15 и 16, которые периодически .входят в контакт с проточками айв штоков 17 и 18 силовых цилиндров 19 и 20, укрепленных посредством кронщтейнов 21 на швеллере 6 в местах загрузки и разгрузки (в исходном левом и правом положениях) На полке швеллера 6 закреплена линейка 22, которая имеет в местах, противолежащих 20 силовым цилиндрам 19 и 20, прорези с (в плоскости перемещения штоков 17 и 18).
В этих же местах имеются прорези на полке швеллера 6. На корпусах механизмов
.13 и И захватов смонтированы ролики 23 и 24, контактирующие с линейкой 22, когда механизмы захвата выходят из зацепления со штоками 17 или 18.
Автооператор работает следующим образом.
Каретка 1, находясь в левом исходном положении {например, у станка), Т-образным пазом 15 механизма 13 захвата находится в контакте с проточкой а штока 17 силового цилиндра 19. Подается команда силовому цилиндру 19 на перемещение вниз штока 17 и связанного с ним механизма 13 захвата, механическая рука II которого предварительно расфиксирована механизмом 13 фиксации. Опустившись до необходимого уровня, механическая рука 9 при помощи механизма 11 фиксации захватывает обработанное изделие из патрона станка (не показан), после чего подается команда силовому цилиндру 19 на подъем штокд 1/ с механизмом 13 захвата в верхнее исходное положение на каретке 1. Затем каретка I перемещается влево гидроприводом 2 и цепью 3 на расстояние, обеспечивающее загрузку заготовки в патрон, в резу.льтате .шток 17 выходит из зацепления с механизмом 13 захвата, который при этом роликом 23 удерживается на линейке 22, а захват 14 своим пазом 16 входит в зацепление с проточкой а штока 17. Каретка 1 останавливается; подается команда силовому цилиндру 19 на опускание штока 17, воздействующего на механизм 14 захвата с механической рукой 10, удерживающей заготов-ку посредством механизма 12 фиксации. Опустившись до уровня патрона (не показан), механическая рука 10 раскрывается механизмом 12 фиксации, оставляя заготовку в патроне. При подаче силовому цилиндру 19 команды на подъем штока 17 захват 14 возвращается в исходное положение на каретке I..Подается команда гидроприводу 2 на перемещение каретки 1 вправо к силовому цилиндру 20 (к транспортеру), при этом механизм 13 и 14 захватов опираются на ролики 23 и 24. Пру подходе каретки 1 к силовому цилиндру 20 паз 16 механизма 14 захвата входит в-зацепление с проточкой в штока 18. Каретка 1 останавливается, подается команда силовому цилиндру 20 на перемещение штока 18 и связанного с ним механизма 14 захвата вниз к транспортеру (не показан). Механическая рука 10 при этом расфиксирована. Опустившись до уровня заготовки, механическая рука 10 берет ее и удерживает механизмом 12 фиксации. Подается команда на подъем механизма
14 захвата с заготовкой в исходное положение на каретке I. Затем гидроприводом 2 и цепью 3 каретка I перемещается вправо на расстояние, необходимое для размещения захвата 13 над транспортером с заготовкой,
при этом Т-образный паз 16 механизма 14 захвата выходит из зацепления с пазом в штока 18, а Т-образный паз 15 механизма 13 захвата входит в зацепление с проточкой в штока 18. Снова подается команда
силовому цилиндру 20 на перемещение штока 18 с механизмом 13 захвата вниз, изделие разгружается, затем снова подается команда силовому цилиндру 20 на перемещение штока 18 с механизмом 13 захвата вверх, при этом механизм 13 захвата займет исходное положение на каретке I. Гидропривод 2 цепью 3 переменлает каретку I в левое исходное положение (к станку).
Цикл работы автооператора повторяется. . Предлагаемая конструкция автооператора обеспечивает значительное уменьшение габаритов каретки и направляющих, что экономит значительное количество металла. Кроме того, закрепление гидроцилиндров стационарно позволяет использовать жесткие трубопроводы, повыщающие надежность и точность работы управляющей гидроэлектроаппаратуры, расширяет диапазон регулирования величины хода штоков, что дает возможность легко переналадить автооператор и, при необходимости перемещать заготовки и изделия на разный уровень транспортеров.
Формула изобретения
Аьтооператор, содержащий каретку, перемещающуюся по направляюСЦим и несущую корпуса механизмов захватов, и силовые цилиндры перемещения захватов к изделию и заготовке, отличающийся тем, что, с целью упрощения конструкции и уменьшения габаритов, он снабжен линейкой, смонтированной на направляющих, и роликами, установленными на механизмах захватов, в корпусах этих захватов выполнены Т-образные пазы, а в штоках силовых цилиндров - проточки, причем ролики кинематически связаны с линейкой, а силовые цилиндры жестко установлены на направляющих.
Источники информации, принятые во внимание Лрн экспертизе 1. Авторское свидетельство СССР № 424689, .кл. В 23 Q 7/04, 1972.
LM
li21
