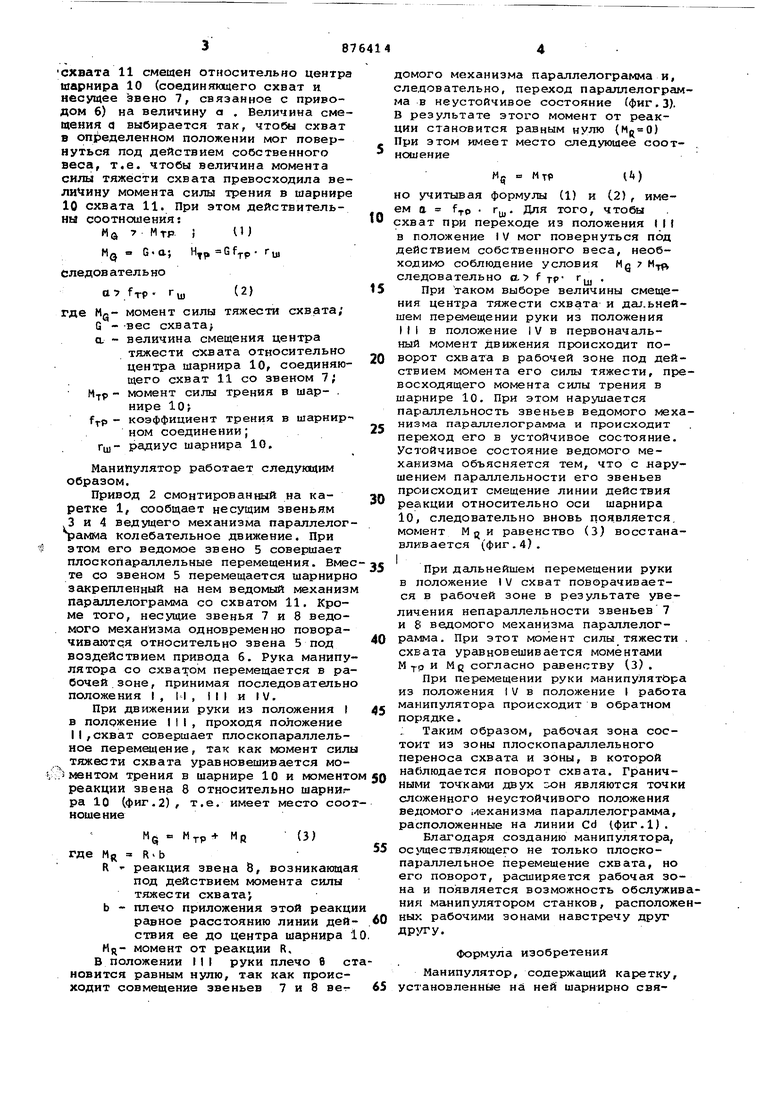
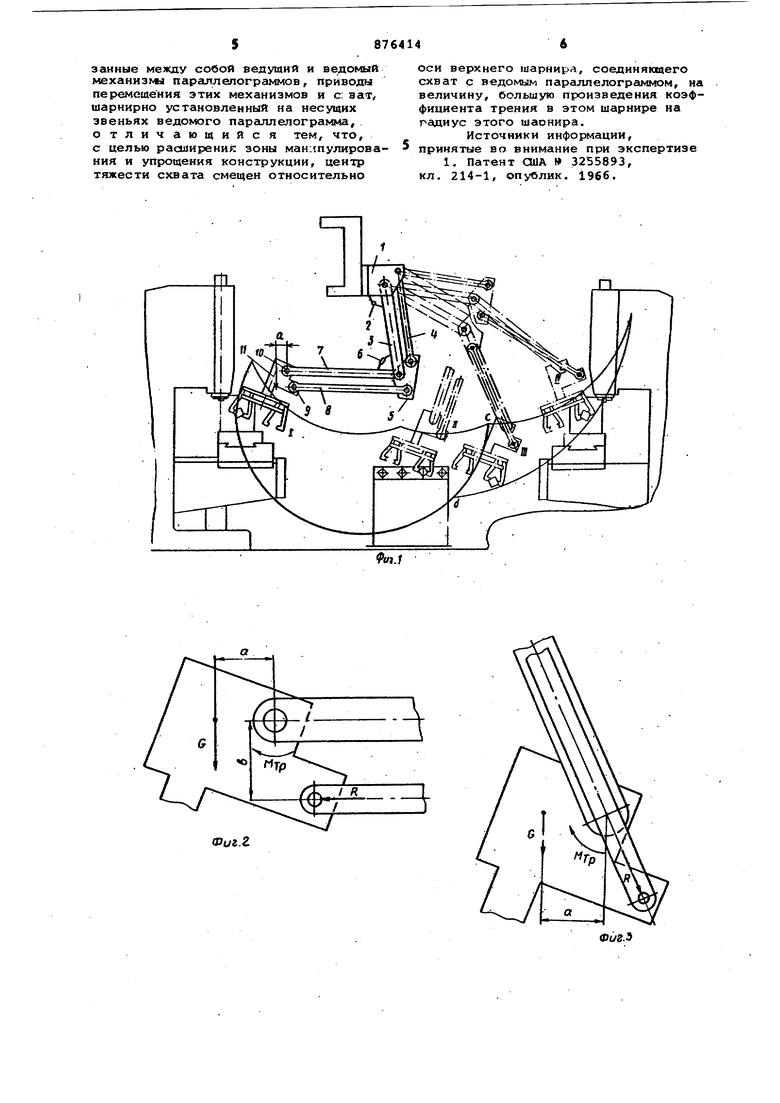
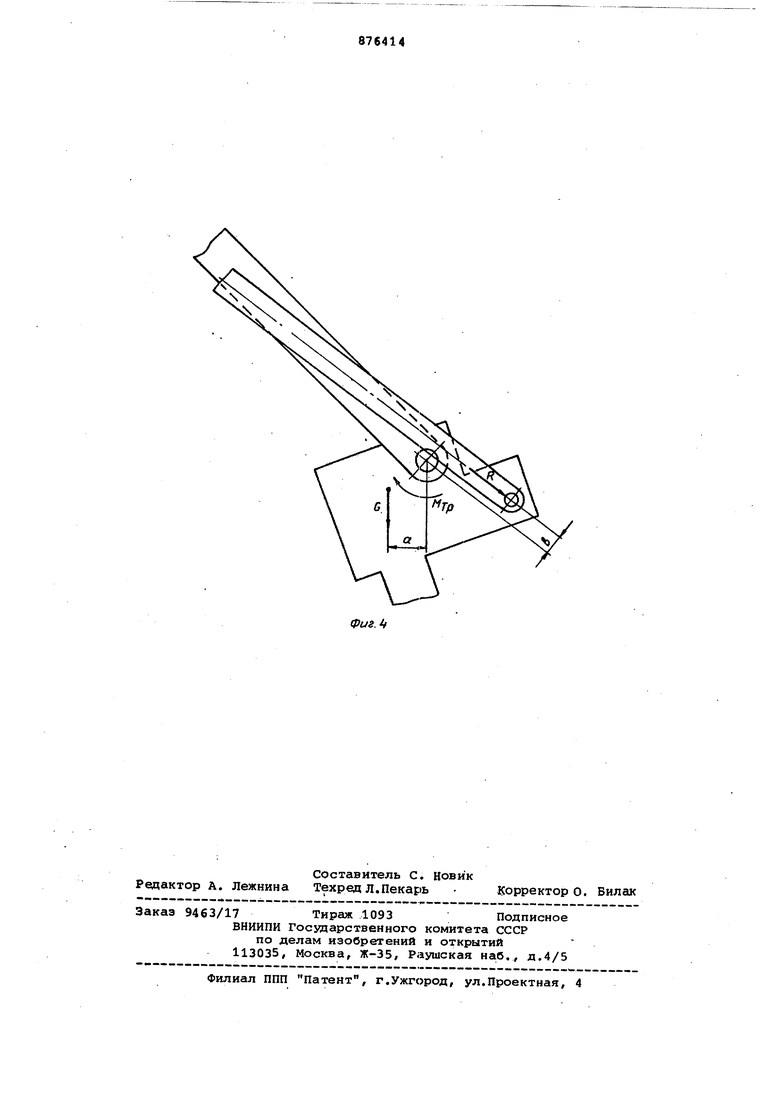
Изобретение относится к манипуляторам и может быть использовано в машиностроении для обслуживания металлорежущего оборудования, в част ности круглофрезеровальных станков, обрабатывающих турбинные лопатки. Известен манипулятор, содержащий каретку, установленные на ней шарнирно связанные между собой ведущий и ведомый механизмы параллелограммов, приводы перемещения этих механизмов и схват, шарнирно установлен ный на несущих звеньях ведомого параллелограмма Г1 . Недостатком этого манипулятора является сложность конструкции, обу ловленная наличием привода поворота схвата, необходимого для обслуживания станков, которые расположены рабочими зонами навстречу друг друг Цель изобретения - расширение зо ны манипулирования при одновременно упрощении конструкции манипулятора путем создания манипулятора, осуществляющего не только плоскопараллельное перемещение схвата но и его поворот. . Поставленная цель достигается те что центр тяжести схвата смещен относительно оси верхнего шарнира, соединяющего схват с ведомым параллелограммом, на величину, большую произведения коэффициента трения в этом шарнире -на радиус этого шарнира. На фиг.1 изображен манипулятор, общий вид (различные положения ведомого и ведущего механизмов паргшлелограмма в рабочей зоне) на фиг.2 схват и ведомый механизм параллелограмма (моменты и реакции, возникающие в шарнирах от веса схвата в зоне плоскопараллельного перекоса); на фиг.З - то же, моменты и реакции, возникающие в шарнирах от веса схвата в неопределенной точке; на фиг. 4 - то же моменты и реакции,возникающие в щарнирах от веса схвата в зоне поворота. Манипулятор содержит каретку 1,. к которой присоединен с возможностью поворота за счет привода 2 ведущий механизм параллелограмма, состоящий из несущих звеньев 3 и 4 и ведомого звена 5. На ведомом звене 5 шарнирно установлен с возможностью поворота за счет привода 6 ведомый механизм параллелограмма, состоящий из несущих звеньев 7 и 8, на которых закреплен посредством шарниров 9 и 10 схват 11, причем центр тяжести охвата 11 смещен отвюсительно центра шарнира 10 (соединяющего схват и несущее звено 7, связанное с приводом 6) на величину а , Величина смещения о выбирается так, чтобы схват в определенном положении мог повернуться под действием собственного веса, т.е. чтобы величина момента силы тяжести схвата превосходила вели4ину момента силы трения в шарнире 10 схвата 11. При этом действительны соотношения: Ma МТР i Ч) G-a; Н. TQ и- u-i п,р С Л е д ов ател ь НО affrf Гц, где MQ- момент силы тяжести схвата; G - -вес схвата а - величина смещения центра тяжести схвата относительно центра шарнира 10, соединяющего схват 11 со звеном 7; МТР - момент силы трения в шар- . нире 10, - коэффициент трения в шарнир ном соединении; Гщ- радиус шарнира 10. Манипулятор работает следующим образом. Привод 2 смонтированный на каретке 1, сообщает несущим звеньям 3 и 4 ведущего механизма параллелог рамма колебательное движение. При этом его ведомое звено 5 совершает плоскопараллельные перемещения. Вме те со звеном 5 перемещается шарнирн закрепленный на нем ведомый механиз параллелограмма со схватом 11. Кроме того, несущие звенья 7 и 8 ведомого механизма одновременно поворачиваются относительно звена 5 под воздействием привода 6. Рука манипу лятора со схватом перемещается в ра бочей зоне, принимая последовательн положения I, II, III и IV. При движении руки из положения I в положение III, проходя положение II,схват совершает плоскопараллельное перемещение, так как момент сил тяжести схвата уравновешивается мо5 ментом трения в шарнире 10 и момент реакции звена 8 относительно шарнигра 10 (фиг.2) , т.е. имеет место соо ношение М0 МТР+ MR (3) где MR Rb R - реакция звена 8, возникающа под действием момента силы тяжести схвата Ь - плечо приложения этой реакц равное расстоянию линии дей ствия ее до центра шарнира Мц- момент от реакции R. В положении III руки плечо 8 с новится равным нулю, так как происходит совмещение звеньев 7 и 8 ве-г омого механизма параллелограмма и, ледовательно, пepeJtoд параллелограма в неустойчивое состояние (фиг.З), результате этого момент от реакии стано-вится равным нулю () ри зтом имеет место следующее соотношениеМд МТР(1) О учитывая формулы (1) и (2), имем а . Гц,. Для того, чтобы хват при переходе из положения (II в положение IV мог повернуться под действием собственного веса, необходимо соблюдение условия MQ 7 М следовательно а f тр- . При таком выборе величины смещения; центра тяжести схвата и дат.ьнейшем перемещении руки из положения III в положение IV в первоначальный момент движения происходит поворот схвата в рабочей зоне под действием момента его силы тяжести, превосходящего момента силы трения в шарнире 10, При этом нарушается параллельность звеньев ведомого механизма параллелограмма и происходит переход его в устойчивое состояние. Устойчивое состояние ведомого механизма объясняется тем, что с нарушением параллельности его звеньев происходит смещение линии действия реакции относительно оси шарнира 10, следовательно вновь появляется, момент Мци равенство (3) восстанавливается (фиг. 4). При дальнейшем перемещении руки в положение IV схват поворачивается в рабочей зоне в результате увеличения непараллельности звеньев 7 и 8 ведомого механизма параллелогpa мa. При этот момент силы тяжести . схвата уравновешивается моментами М-гр и М(2 согласно равенству (3) . При перемещении руки манипулятора из положения IV в положение I работа манипулятора происходит в обратном порядке. Таким образом, рабочая зона состоит из зоны плоскопараллельного переноса схвата и зоны, в которой наблюдается поворот схвата. Граничными точками двух зон являются точки сложенного неустойчивого положения ведомого механизма параллелограмма, расположенные на линии Cd (фиг.1). Благодаря созданию манипулятора, ос дцествляющего не только плоскопараллельное перемещение схвата, но его поворот, расширяется рабочая зона и появляется возможность обслуживания манипулятором станков, расположенных рабочими зонами навстречу друг ДР1/ГУ. Формула изобретения Манипулятор, содержащий каретку, установленные на ней шарн-ирно свяэанные между собой ведущий и ведомый механизмы параллелограммов, приводы перемещения этих механизмов и с; ват, шарНИРно установленный на несущих звеньях ведомого параллелограмма, отличающийся тем, что, с целью расширение: зоны манипулирования и упрощения конструкции, центр тяжести схвата смещен относительно
оси верхнего шарнира, соединякщего схват с ведомым параллелогрг ммом, на величину, большую произведения коэффициента трения в этом шарнире на радиус этого шаонира.
Источники информации, принятые во внимание при экспертизе
1. Патент США 3255893, кл, 214-1, опублик. 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1085805A1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| Промышленный робот | 1977 |
|
SU846267A1 |
| Устройство для открывания клапанных мешков и надевания их на патрубки расфасовочных машин | 1985 |
|
SU1323469A1 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| РЕЕЧНАЯ ПЕРЕДАЧА | 2003 |
|
RU2230244C1 |
| Промышленный робот | 1977 |
|
SU837850A1 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
| Манипулятор | 1971 |
|
SU372885A1 |
| Манипулятор | 1980 |
|
SU1050863A1 |
Фиг.2.
