(54) МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулирующее устройство | 1983 |
|
SU1146194A2 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| Манипулирующее устройство | 1974 |
|
SU510363A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Манипулирующее устройство | 1985 |
|
SU1271741A1 |
| Манипулирующее устройство | 1978 |
|
SU674890A2 |
| Полуавтоматический станок для совместной обработки грифа и корпуса музыкальных инструментов | 1986 |
|
SU1339016A1 |
| МНОГОПОЗИЦИОННЫЙ СТАНОКI ВСЕСОЮЗНАЯ \ | 1973 |
|
SU381499A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |

I
Изобретение относится к машиносТрое- . нию, а именно к манипуляторам и промышлеиным роботам, предназначенным для механизации и автоматизации загрузки деталей в металлорежущих станках.,
Известно манипулирующее устройство, содержащее корпус с расположенными в нем вращающимся шпинделем, возвратнопоступательно перемещающимся толкателем и захватными головками со Стержнями |1.
Недостатками известной конструкции яЬ-. ляются низкая производительность при обслуживании многоместных станочных приг; енособлений, а также вероятность открывания губок захватов на головке, иаходящеЙ7 ся под углом к оси шпинделя.
Цель изобретения - повышение производительности при смене захватных головок для выполнения загрузочно-разгрузочных работ на обрабатывающих станках, оснащенных многоместными приспособлениями, а также исключение возможности самопроизвольного откреплеиия заготовки, зажатой в любой из захватных головок прн любом их относительном положении.
Поставленная цель достигается тем, что устройство снабжено установленной на базирующем торце шпинделя площадкой, на которой расположены захватные головки, с закрепленным на корпусе диском с выполненным в нем кольцевым Т-образным пазом, с которым взаимодействуют стержнн ахватных головок.
На концах стержней захватных головок выполнены углубления, в которых с возможностью вращения установлены шарики.
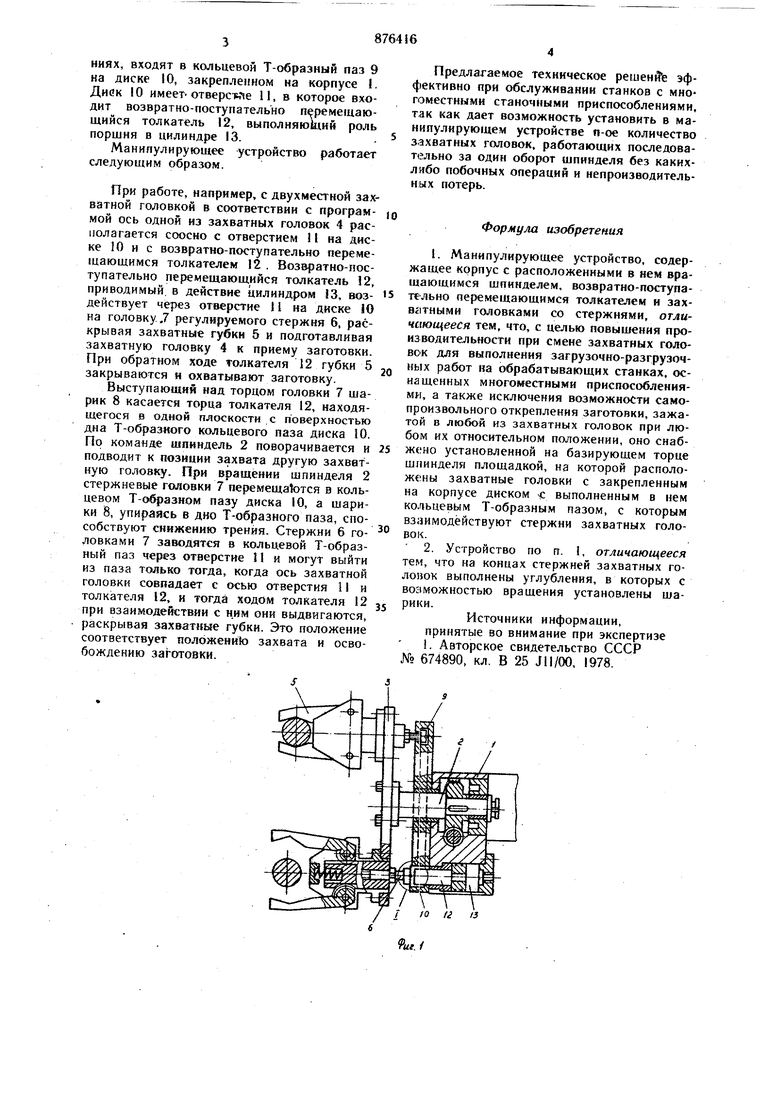
На фиг. I изображено маннпулирующее
10 устройство с двумя захватными головками, вид спереди; на фиг. 2 - то же, вид сбоку; . на фиг. 3 - узел I на фиг. 1 в положении захвата.
В корпус 1 маиипулирующего устройства 9 помещен поворотный шпиндель 2, на базирующем торце которого расположена площадка 3, имеющая п отверстий, выполненных равномерно по окружности. В каждом из отверстий закреплено п-ое количество захватиых головок 4, губки 5 которых свя20заны с регулнруемыми стержнями 6. Головки 7 стержней 6 с шариками 8 установленными с возможностью вращения в углублениях, входят в кольцевой Т-образный паз 9 на диске 10, закрепленном на корпусе . Диск 10 имеет-отверс е И, в которое входит возвратно-поступательно переметающийся толкатель 12, выполняющий роль поршня в цилиндре 13.
Манипулирующее устройство работает следующим образом.
При работе, например, с двухместной захватной головкой в соответствии с программой ось одной из захватных головок 4 располагается соосно с отверстием I на диске 10 и с возвратно-поступательно перемещающимся толкателем 12 . Возвратно-поступательно перемещающийся толкатель 12, приводимый, в действие цилиндром 13, воздействует через отверстие II на диске 10 на головку .7 регулируемого стержня 6. раскрывая захватные губки 5 и подготавливая захватную головку 4 к приему заготовки. При обратном ходе толкателя 12 губки 5 закрываются и охватывают заготовку.
Выступающий над торцом головки 7 щарик 8 касается торца толкателя 12, находящегося в одной плоскости с поверхностью дна Т-образного кольцевого паза диска 10. По команде шпиндель 2 поворачивается и подводит к позиции захвата другую захватную головку. При вращении шпинделя 2 стержневые головки 7 перемещается а кольцевом Т-образном пазу диска 10, а шарики 8, упираясь в дно Т-образного паза, способствуют снижению трения. Стержни 6 головками 7 заводятся в кольцевой Т-образный паз через отверстие П и могут выйти из паза только тогда, когда ось захватной головки совпадает с осью отверстия 11 и толкателя 12, и тогда ходом толкателя 12 при взаимодействии с н.им они выдвигаются, раскрывая захватные губки. Это положение соответствует пол6жени1о захвата и освобождению заготовки.
Предлагаемое техническое pemeHHte эффективно при обслуживании станков с многоместными станочными приспособлениями, так как дает возможность установить в манипулирующем устройстве п-ое количество захватных головок, работающих последовательно за один оборот щпинделя без какихлибо побочных операций и непроизводительных потерь.
Формула изобретения
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 674890, кл. В 25 Л1/00, 1978.
9иг.г 9иг. д
