(54) ШАГАЮЩИЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий конвейер | 1972 |
|
SU479693A1 |
| Шагающий конвейер | 1983 |
|
SU1146256A1 |
| Привод шагающего конвейера | 1979 |
|
SU876530A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| Шагающий конвейер | 1979 |
|
SU829500A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2024423C1 |
| Шагающий конвейер | 1978 |
|
SU804551A1 |
| Шагающий конвейер | 1983 |
|
SU1094816A1 |
| Шагающий конвейер | 1981 |
|
SU996295A1 |
| НАКАПЛИВАЮЩЕЕ УСТРОЙСТВО ДЛЯ ОДНОТИПНЫХГРУЗОВ | 1970 |
|
SU258922A1 |
Известны шагающие конвейеры, содержаище неподвижную раму н расположенную на роликах подвижную раму, связанную с приводом ее продольного перемещения 1.
Недостатком известных конвейеров является нх невысокая производительность из-за необходимости затраты време ни на вертиюшьное перемещение подвижной рамы.
Наиболее близким к предлагаемому является щагающий конвейер, содержащий неподвижную и подвижную рамы, установленные на роликах, привод продольного перемещения подвижной рамы и пружину 2.
Недостатком известного конвейера является сложность конструкции и его обслуживание т.е. недостаточно высокая надежность.
Цепь изобретения - повышение надежности конвейера.
Указанная цель достигается тем, что неподвижная рама снабжена клиньями, а конвейер дополнительными роликами, )ч;тановленнымн с возможностью качения по поверхности клиньев, причем поверхность качения клиньев расположена под углом к горизонтальной плоскости, тангенс которого меньше коэффициента трения груза по неподвижной раме.
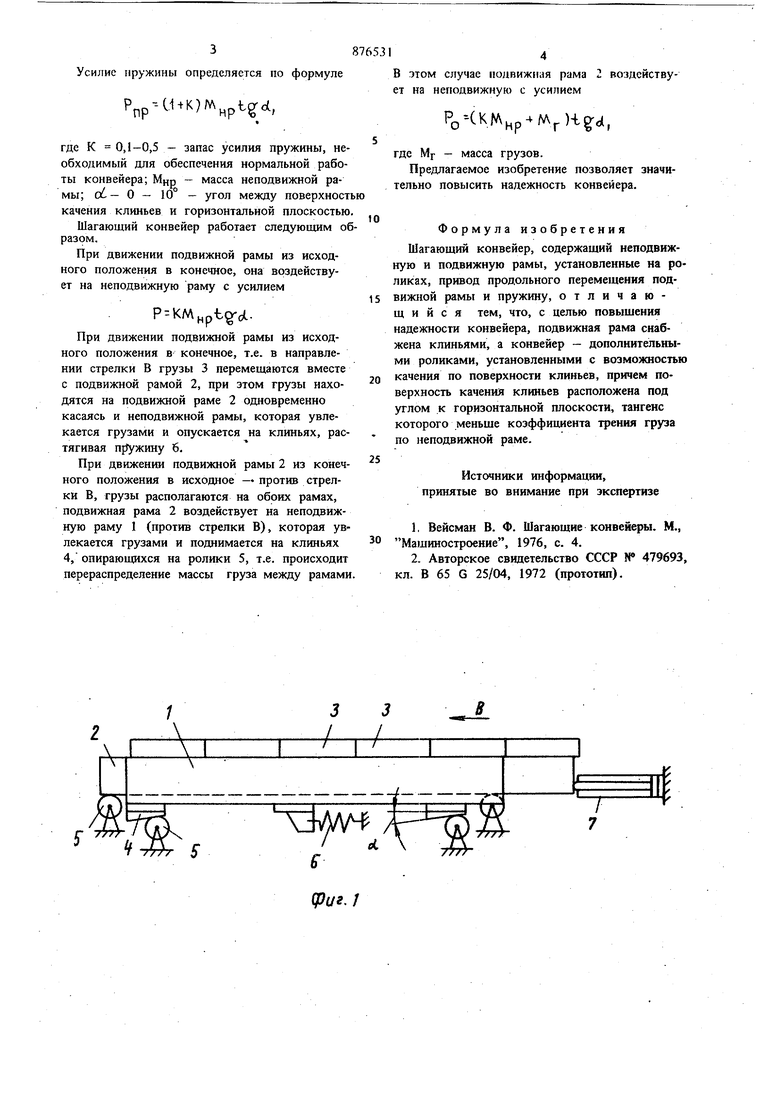
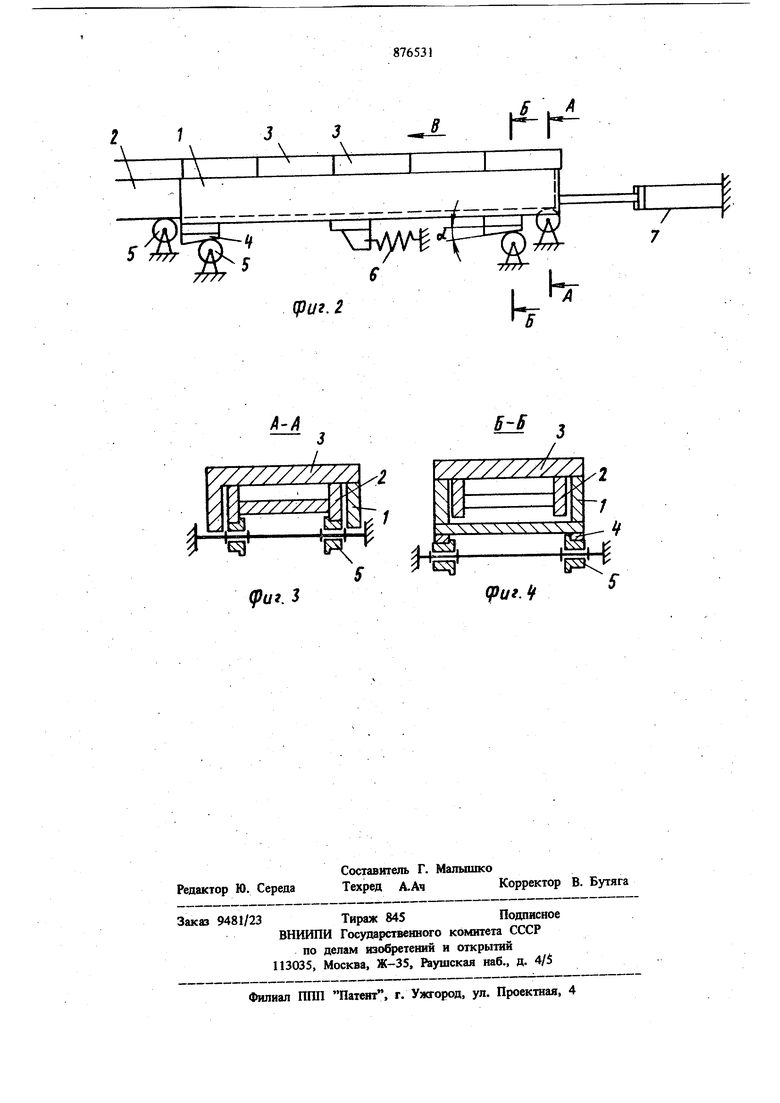
На фиг. 1 показан предлагаемый конвейер; на фиг. 2 - то же, положшие привода; на фнг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2.
Шагающий конвейер состоит из рамы I и подвижной рамы 2, на которых установлены транспортирующие грузы 3. Рама 1 своими клиньями 4 установлена на роликах 5. Подвижная рама 2 также установлена на роликах 5. Поверхность клиньев 4, контактирующая с роликами 5, установлена под углом 0 по отношению к движению грузов 3. На раме 1 закреплена пружина 6. Привод 7, выполненный нз пздроцилиндра, обеспечивает возвратно-поступательное перемещение подвижной рамы 2 на шаг, равный длине одного груза 3 3 Усилие пружины определяется по формуле Pnp- K MptSf, где К 0,1-0,5 - запас усилия пружины, необходимый для обеспечения нормальной работы конвейера; Мнр - масса неподвижной рамы; cL- Q - 10° - угол между поверхност качения клиньев и горизонтальной плоскостью Шагающий конвейер работает следующим об разом. При движении подвижной рамы из исходного положения в конечное, она воздействует на неподвижную раму с усилием движении подвижной рамы из исходного положения в конечное, т.е. в направлении стрелки В грузы 3 перемещаются вместе с подвижной рамой 2, при этом грузы находятся на подвижной раме 2 одновременно касаясь и неподвижной рамы, которая увлекается грузами и опускается на клиньях, растягивая прГужину 6. При движении подвижной рамы 2 из конечного положения в исходное - против стрелки В, грузы располагаются на обоих рамах, подвижная рама 2 воздействует на неподвижную раму 1 (против стрелки В), которая увлекается грузами и поднимается на клиньях 4, опирающихся иа ролики 5, т.е. происходит перераспределение массы груза между рамами
/
/et
е
(Риг./ Б этом случае подвижная рама 2 воздействует на неподвижную с усилием Po4KN,p4M,Hg:a, где MI- - масса грузов. Предлагаемое изобретение позволяет значительно повысить надежность конвейера. Формула изобретения Шагающий коивейер, содержащий неподвижную и подвижную рамы, установленные на роликах, привод продольного перемещения подвижной рамы и пружину, отличающийся тем, что, с целью повыщения надежности конвейера, подвижная рама снабжена клиньями, а конвейер - дополнительными роликами, установленными с возможностью качения по поверхности клиньев, причем поверхность качения клиньев расположена под углом к горизонтальной плоскости, тангенс которого меньще козффищ1ента трения груза по неподвижной раме. Источники информации, принятые во внимание при экспертизе 1,Вейсман В. Ф. Шагающие конвейеры. М., Машиностроение, 1976, с. 4. 2.Авторское свидетельство СССР fC 479693, кл. В 65 G 25/04, 1972 (прототип).
(риг. 2
hr
k
5-f
L
/
2
7
V
S.
eg
t/. 5
. 4
