Изобретение относится к машииостроению, а конкретнее к технологическому подъемно-транспортному оборудованию для пульсирующего перемещения грузов, и может быть использовано, например, для межоперационного накопления, транспортировки, укладки и удаления листовых деталей, отходов из-под щтампов в автоматических линиях и т. д.
Известен шагающий конвейер, содержащий неподвижную раму и размещенную между ее балками подвижную раму с клиновидными кулачками, связанную с приводом продольного перемещения и установленную на тележках. Угол наклона клиновидных кулачков зависит от угла трения 1.
Недостатками данного конвейера являются сложность (наличие тележек, пружин, зависимость от угла трения), больщие габариты, ограниченность использования для перемещения легких грузов.
Наиболее близким техническим решением к предлагаемому является шагающий конвейер, содержащий неподвижное основание, подвижную в вертикальной плоскости опорную раму с клиновыми копирами, установленную с возможностью возвратно-поступательного перемещения подвижную раму и привод подвижной рамы. Подвижная в вертикальной плоскости опорная рама связана с неподвижным основанием посредством пружины, а поверхность качения клиньев копиров расположена под углом к горизонтальной плоскости, тангенс которого меньше коэффициента трения груза по опорной раме 2.
Недостатком известного конвейера является ненадежность его работы, поскольку усилие пружины зависит от массы опорной рамы и угла между поверхностью качения клиньев копиров и горизонтальной плоскостью. Кроме того, устройство не обеспечивает транспортирование грузов разного веса, нетяжелых грузов с малой опорной плоскостью, листовых гнущихся заготовок.
Цель изобретения - повыщение надежности работы конвейера.
Указанная цель достигается тем, что щагающий конвейер, содержащий неподвижное основание, подвижную в вертикальной плоскости опорную раму с клиновыми копирами, установленную с возможностью возвратно-поступательного перемещения под. раму и привод подвижной рамы, снабжен передающей р.амой, установленной на неподвижном основании с возможностью возвратно-поступательного перемещения и взаимодействия с опорной рамой и подвижной рамой при помощи закрепленных на передающей раме соответственно клиновых кулачков и упоров, при этом подвижная рама снабжена толкателем, размещенным между упорами, а неподвижное основание
снабжено ограничительными направляющими для опорной рамы.
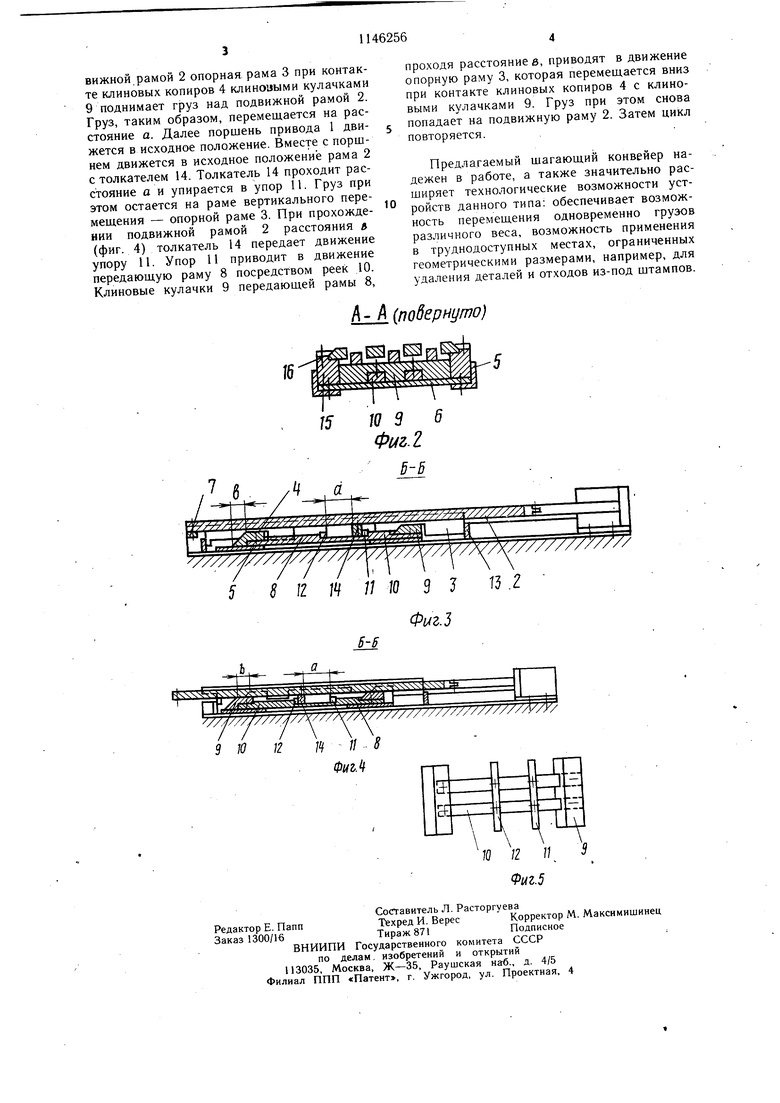
На фиг. 1 изображен щагающий конвейер в исходном положении подвижной рамы, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 то же, при крайнем переднем положении подвижной рамы; на фиг. 5 - передающая рама.
Шагающий конвейер состоит из привода 1 возвратно-поступательного перемещения, установленной с возможностью возвратно-поступательного перемещения подвижной рамы 2 (фиг. 1) и подвижной в вертикальной плоскости опорной рамы 3 с клиновыми ко5 пирами 4. На неподвижном основании 5 закреплены направляющие 6. Подвижная рама 2 имеет стяжку 7. На нижних направляющих 6 неподвижного основания 5 установлена с возможностью возвратно-поступательного перемещения передающая рама 8, 0 состоящая из клиновых кулачков 9, реек 10 и упоров 11 и 12. На клиновые кулачки 9 установлена опорная рама 3, которая расположена между ограничительными вертикальными направляющими 13, закрепленными на неподвижном основании 5.
На подвижной раме 2 закреплен толкатель 14, размещенный между упорами 11 и 12. Подвижная рама 2 располагается между направляющими 15 и крыщками 16. Направляющие 15 крепятся к направляющим 6. Крышки 16 и опорная рама 3 находятся ниже плоскости подвижной рамы.
Рабочий ход привода определяется по формуле.
Яр а-Ье,
где а - расстояние, которое проходит толкатель подвижной рамы без взаимодействия с упорами 11 и 12; в -расстояние, которое проходит толкатель подвижной рамы, взаимодействуя с упорами 11 и 12.
0 Шагающий конвейер работает следующим образом.
В исходном положении груз находится на подвижной раме 2 между вертикальными направляющими 13. Поршень привода 1 движется вместе с подвижной рамой 2, толкателем 14 и грузом в направляющих 15 и крышках 16. После прохождения расстояния а (фиг. 3) толкатель 14 доходит до упора 12 передающей рамы 8. При прохождении расстояния R толкатель 14 передает движение упору 12. Упор 12 приводит в движение . передающую раму 8, опирающуюся на нижние направляющие 6, через рейки 10. Клиновые кулачки 9 передающей рамы 8 в свою очередь приводят в движение раму вертикального перемещения - опорную раму 3, которая двигается вверх в вертикальных направляющих 13 и по контактирующей с клиновыми кулачками 9 поверхности. После прохождения расстояния в (фиг. 4) подвижной рамой 2 опорная рама 3 при контакте клиновых копиров 4 клиноиыми кулачками 9 поднимает груз над подвижной рамой 2. Груз, таким образом, перемещается на расстояние а. Далее поршень привода 1 движется в исходное положение. Вместе с поршнем движется в исходное положение рама 2 с толкателем 14. Толкатель 14 проходит расстояние а и упирается в упор 11. Груз при этом остается на раме вертикального перемещения - опорной раме 3. При прохождении подвижной рамой 2 расстояния л (фиг. 4) толкатель 14 передает движение упору 11. Упор 11 приводит в движение передающую раму 8 посредством реек 10. Клиновые кулачки 9 передающей рамы 8,
проходя расстояние 8, приводят в движение опорную раму 3, которая перемещается вниз при контакте клиновых копиров 4 с клиновыми кулачками 9. Груз при этом снова попадает на подвижную раму 2. Затем цикл повторяется.
Предлагаемый шагающий конвейер надежен в работе, а также значительно расширяет технологические возможности устройств данного типа: обеспечивает возможность перемещения одновременно грузов различного веса, возможность применения в труднодоступных местах, ограниченных геометрическими размерами, например, для удаления деталей и отходов из-под штампов.
А- (подернуто)
W 9 6 Фмz.Z
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| Шагающий конвейер | 1981 |
|
SU996295A1 |
| Шагающий конвейер | 1983 |
|
SU1094816A1 |
| Шагающий конвейер | 1978 |
|
SU804551A1 |
| Шагающий конвейер | 1980 |
|
SU956377A1 |
| Шаговый конвейер | 1979 |
|
SU846437A1 |
| Разгрузочное устройство для подвесного конвейера | 1979 |
|
SU870299A1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
ШАГАЮЩИЙ КОНВЕЙЕР, содержащий неподвижное основание, подвижную в вертикальной плоскости опорную раму с клиновыми копирами, установленную с возможностью возвратно-поступательного перемещения подвижную раму и привод подвижной рамы, отличающийся тем, что, с целью повыщения надежности работы конвейера, он снабжен передающей рамой, установленной на неподвижном основании с возможностью возвратно-поступательного перемещения и взаимодействия с опорной рамой и подвижной рамой при помощи закрепленных на передающей раме соответственно клиновых кулачков и упоров, при этом подвижная рама снабжена толкателем, размещенным между упорами, а неподвижное основание снабжено ограничительными направляющими для опорной рамы. О) ND СП О5
///// //// /// 5 S II Ч
П W 9 J .5
У/./////////1//Х//// /Л(/.
3 да м ц - ;/..
У
ИЪ.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шагающий конвейер | 1972 |
|
SU479693A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шагающий конвейер | 1979 |
|
SU876531A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
