Изобретение относится к робототехнике и может быть, использовано в различных областях машиностроения, приборостроения и др.
Известен манипулятор, содержащий механизм линейного, перемещения.захвата, выполненный в виде силового ; цилиндра, на штоке которого размещены механизмы поворота и фиксации захвата, и систему управления 1.
Однако известный манипулятор обладает узкими технологическими возможностями.
Цель изобретения - расширение технологических возможностей манипулятора.
Цель достигается тем, что манипулятор снабжен штангой с наружной резьбой, зажимом штанги, размещенным на корпусе силового цилиндра и связанным с системой управления, и зубчатой парой, причем одно из колес этой пары размещено на механизме поворота захвата и снабжено упором, предназначенным для взаимодействия, с этим механизмом а другое колесо выполнено с резьбовым отверстием и размещено на штанге, образуя с ней несамотормозящуюся резьбовую пару.:
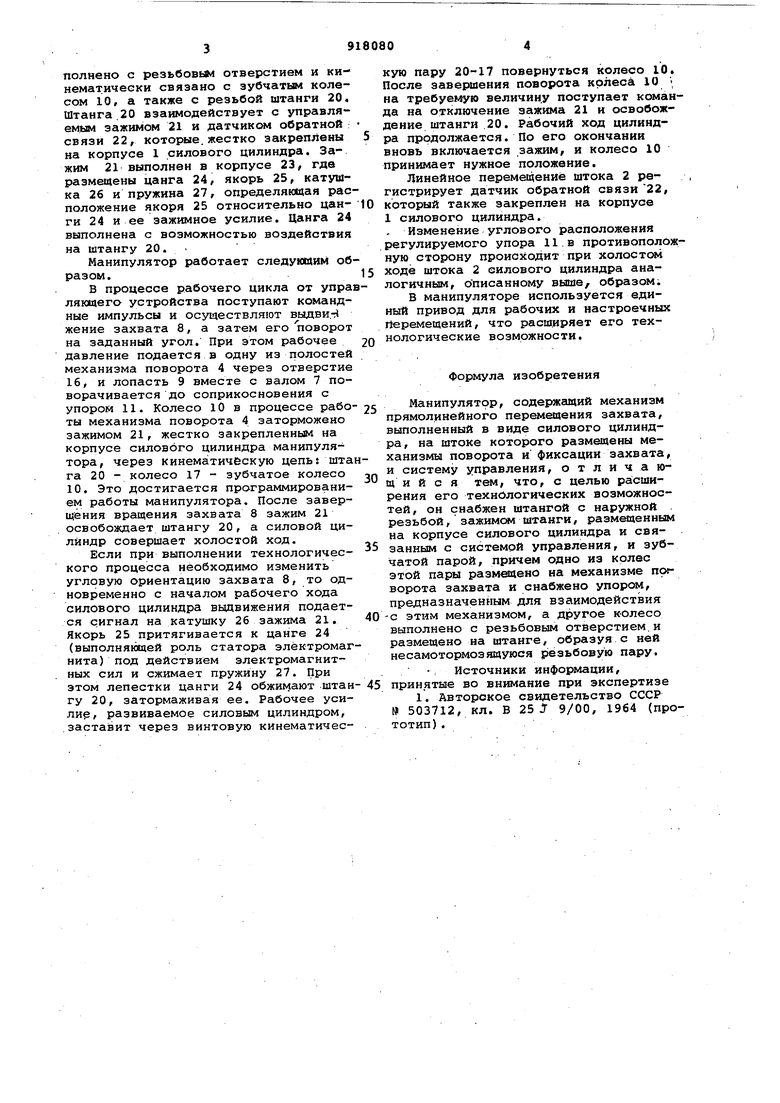
На фиг. 1 изображен манипулятор; на фиг. 2 - разрез А-А на фиг 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 1; на фиг.5 вид Г на фиг. 1.
Манипулятор содержит механизм прямолинейного перемещения, выполненный в виде силового цилиндра, состоящего из корпуса 1 и штока 2 с.порш10нем 3. Механизм поворота 4 жестко закреплен на штоке 2 силового цилиндра посредством скобы 5 и состоит из корпуса 6, вала 7, на котором крепятся захват-8 и лопасть 9, и зубча15тое колесо 10, на котором закреплен упор 11, предназначенный для взаимодействия с лопастью 9. Колесо 10 выполнено с возможностью вращения относительно корпуса б за счет иголь-.
20 чатого подшипника 12 и винтов 13, закрепленных в корпусе 6 и размещенных в его направлякидих пазах 14. вал 7 установлен в подшипниках 15. Через . отверстия 16 -механизм поворота свя25зан энергокоммуникациями с системой управления ( на чертеже не показано). Корпус 6 является опорой и для зубчатого колеса 17, которое смонтировано на радиальных 18 и упорном 19 30 подшипниках. Зубчатое колесо 17 выполнено с резьбовьм отверстием и кинематически связано с эубчатБМ колесом 10, а также с резьбой штанги 20. Штанга.20 взаимодействует с управляемым зажимом 21 и датчиком обратной: связи 22, которые, жестко закреплены на корпусе 1 силового цилиндра. Зажим 21 выполнен в корпусе 23, где размещены цанга 24, якорь 25, катушка 26 и пружина 27, определяющая расположение якоря 25 относительно цанги 24 и ее зажимное усилие. Цанга 24 выполнена с возможностью воздействия на штангу 20.
Манипулятор работает следующим образом.
В процессе рабочего цикла от упраляющего устройства поступают командные импульсы и осуществляют выдви-т жение захвата 8, а затем его поворот на заданный угол. При этом рабочее давление подается в одну из полостей механизма поворота 4 через отверстие 16, и лопасть 9 вместе с валом 7 поворачивается до соприкосновения с упором 11. Колесо 10 в процессе работы механизма поворота 4 заторможено зажимом 21, жестко закрепленным на корпусе силового и,илиндра манипулятора, через кинематическую цепь: штага 20 - колесо 17 - зубчатое колесо 10. Это достигается программированием работы манипулятора. После заверщения вращения захвата 8 зажим 21 освобождает штангу 20, а силовой цилиндр совершает холостой ход.
Если при выполнении технологического процесса необходимо изменить угловую ориентацию захвата 8, то одновременно с началом рабочего хода силового цилиндра вьивижения подается сигнал на катушку 26 зажима 21. Якорь 25 притягивается к цанге 24 (выполнякадей роль статора электромагнита) под действием электромагнитных сил и сжимает пружину 27. При этом лепестки цанги 24 обжимают штанГУ 20, затормаживая ее. Рабочее усилие, развиваемое силовым цилиндром, .заставит через винтовую кинематическую пару 20-17 повернуться колесо 10, После завершения поворота колеса 10 на требуемую величину поступает команда на отключение зажима 21 и освобождение штанги 20 . Рабочий ход цилиндра продолжается. По его окончании вновь включается зажим, и колесо 10 принимает нужное положение.
Линейное перемещение штока 2 регистрирует датчик обратной связи 22, который также закреплен на корпусе 1 силового цилиндра. . Изменение углового расположения регулируемого упора 11 в противоположную сторону происходит при холостом ходе штока 2 силового цилиндра аналогичным, описанному выше, образом;
В манипуляторе используется единый привод для рабочих и настроечных йеремещений, что расширяет его технологические возможности.
Формула изобретения
МанипулятрР содержащий механизм прямолинейного перемещения захвата, выполненный в виде силового цилиндра, на штоке которого размещены механизмы поворота и фиксации захвата, и систему управления, отличающийся тем, что, с целью расширения его технологических возможностей, он снабжен штангой с наружной резьбой, зажимом штанги, размаценным на корпусе силового цилиндра и связанным с системой управления, и зубчатой парой, причем одно из колес этой пары размещено на механизме потворота захвата и снабжено упором, предназначенным для взаимодействия -с этим механизмом, а другое колесо выполнено с резьбовым отверстием.и размещено на штанге, образуя с ней несамотормозящуюся резьбовую пару.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 503712, кл. В 25 J 9/00, 1964 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1989 |
|
SU1821357A1 |
| Автоматическая линия спутникового типа | 1985 |
|
SU1505757A1 |
| Машина для очистки наружной поверхности цилиндрических изделий | 1976 |
|
SU657878A1 |
| ТРУБОРЕЗНЫЙ АВТОМАТ | 1993 |
|
RU2085343C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРОФИЛИРОВАННЫХ СТЕБЛЕЙ СВЕРЛ ОДНОСТОРОННЕГО РЕЗАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2136423C1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Станок для намотки якорей коллекторных электрических машин | 1976 |
|
SU688962A1 |
| Захват манипулятора | 1989 |
|
SU1779581A1 |

A-A
В-Б
BuSg
Л
Фиг.З
ФиеЛ
ВиВГ
Фиг.5
