Изобретение относится к машиностроению и может б,1ть использовано в манипуляторах, промышленных роботах и робототехнических системах.
Цель изобретения - расширение фун- кциональных возможностей путем определения количества захваченных деталей и повышение надежности.
На чертеже изображен электромагнитный схват, разрез.
Электромагнитньм схват содержит цилиндрический корпус 1 с державкой
2,в котором установлен на пружине 3 с возможностью осевого перемещения стакан 4, внутри которого расположен электромагнит, включающий обмотку 5 и сердечник 6, соединенный со стаканом резьбовым соединением. Внутри сердечника 6 в отверстии установлен толкатель 7, один конец которого выступает над уровнем рабочей поверхности охвата, а другой проходит через резьбовую втулку 8, поджимающую пружину 9 толкателя. Усилие пружины
3,поджимающей стакан 4, регулируется крышкой 10, перемещаемой в корпусе по резьбовому соединению,
В крьшке 10 установлен концевой выключатель 11, расположенный в центре и взаимодействующий с другим концом толкателя 7, и электрический контакт 12, взаимодействующий с кольцевым электрическим контактом 13, установленным на верхней плоскости стакана,
Схват работает следующим образом. Для перемещения заготовок, находящихся, например, в кассете питателя, схват перемещается к поверхности кассеты, например роботом, и опускается до контакта рабочей поверхности охвата с заготовкой, после чего подается ток на обмотку 5 электромагнита. Верхняя заготовка притягивается электромагнитом к сердечнику 6, а толкатель 7 перемещается поверхностью заготовки вверх и включает концевой выключатель 11, который сигнализирует о наличии заготовки. После этого охват поднимается над кассетой и, если им захвачена одна заготовка, то системой управления роботом на обмотку 5 подается увеличенный ток переноса и заготовка, надежно удерживаемая схва- том, переносится и укладывается на рабочую позицию, например в штамп, после чего ток электромагнита выклю- ,чаетоя и подпружиненный толкатель 7
JO
t5
20
25
5
964072
отрывает заготовку от рабочей поверхности охвата и обеспечивает ее точную фиксацию в установленном положении.
Если схват не поднял с кассеты заготовки, то толкатель 7 под действием пружины 9 перемещается в исходное положение, концевой выключатель 11 выключается и это служит сигналом на повторение, цикла захвата. При подъеме схватом двух заготовок и более от их веса стакан 4, преодолевая уоилие пружины 3, перемещается вниз, контакты 12 и 13 размыкаются и это служит сигналом оиотеме управления роботом на отключение питания электромагнита и оброс заготовок, например в тару, и повторньй захват. Настройка схвата на перемещаемые заготовки производится следующим образом.
Перемещением по резьбе корпуса 1 крышки 10 усилие пружины устанавливается таким, чтобы при наличии на рабочей поверхности захвата одной заготовки отакан надежно поджимался к крьш1ке и контакты 12 и 13 были .зам
кнуты, а при наличии двух заготовок на охвате от их веса отакан 4 пере- мещалоя вниз, ожимая пружину 3, и размыкал контакты 12 и 13. Перемещением резьбовой втулки 8 по резьбе в оердечнике 6 уотанавливаетоя уоилие пружины 9 таким, чтобы при выключении электромагнита обеопечивал- оя надежный отрыв заготовки от рабочей поверхности и точная фикоация ее положения при установке.
Формула изобретения
Электромагнитный охват, оодержа- щий уотановленный в корпуое с возмож- ноотью осевого перемещения и подпружиненный к нему отакан, в котором закреплен эле;ктромагнит, и концевой выключатель, отличающийоя тем, что, о целью раоширения функциональных возможностей путем определения количества захваченных деталей и повышения надежности, он онаб- жен крьшзкой, расположенной в корпуое со стороны, противоположной рабочей поверхности охвата, о возможноотью осевого перемещения и фикоации, толкателем, установленным в сердечнике электромагнита и подпружиненным к нему в осевом направлении о возможностью регулирования усилия пружины.
3 1296407 .А
а также двумя электрическими контак- чатель расположен на крышке с возмож- тами, один из которых установлен на ностью взаимодействия с одним концом крьшке, а другой - на стакане с -воз- толкателя, другой конец которого рас- можностью их взаимодействия между положен выше уровня рабочей поверх- собой (замыкание), а концевой выклю- 5 ности схвлта.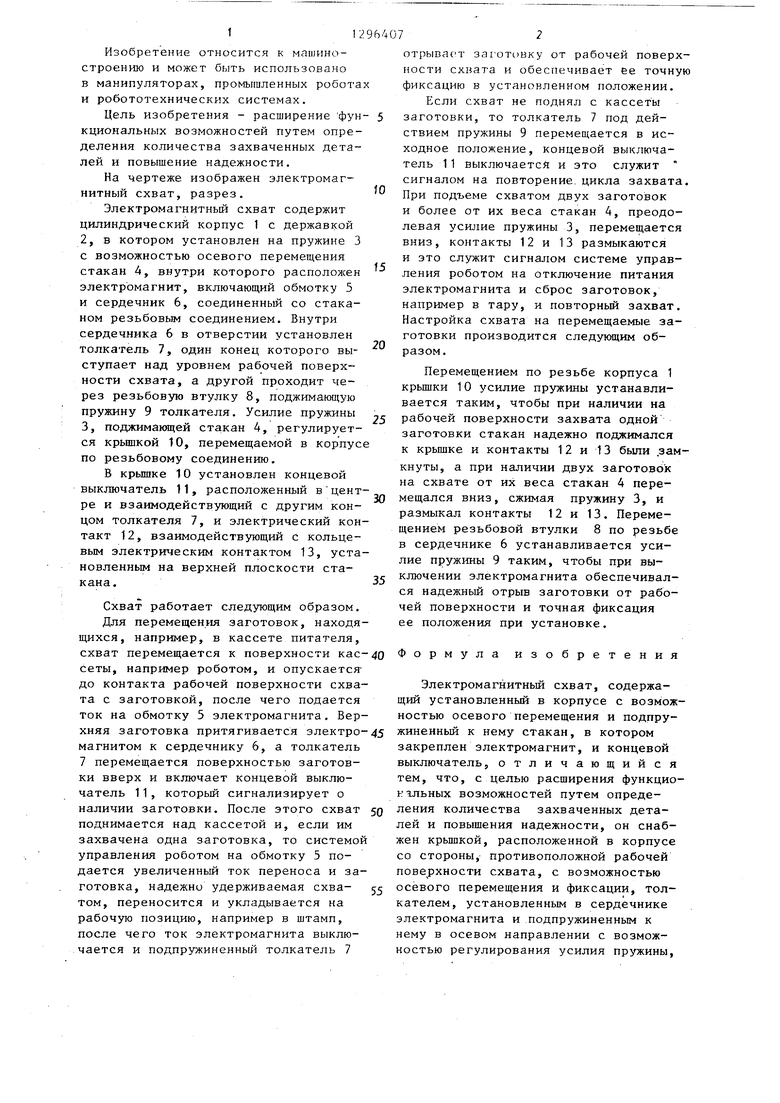
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной выдачи заготовок | 1986 |
|
SU1324728A1 |
| Устройство для подачи заготовок | 1984 |
|
SU1207716A2 |
| Устройство для поштучной выдачи заготовок | 1987 |
|
SU1456271A1 |
| Автоматизированный комплекс для многопереходной штамповки | 1986 |
|
SU1349851A1 |
| Устройство для накопления и поштучной выдачи заготовок | 1983 |
|
SU1184590A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| Магазинное устройство робототехнологического комплекса | 1987 |
|
SU1542669A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
Изобретение относится к машиностроению и может быть использовано в манипуляторах, промышленных роботах и робототехнических системах. Целью изобретения является расширение функциональных возможностей путем определения количества захваченных деталей и повышение надежности. После контакта рабочей поверхности схвата с захватываемой заготовкой на обмотку 5 электромагнита подается ток. Верхняя заготовка притягивается к сердечнику 6, а толкатель 7 перемещается поверхностью заготовки вверх и включает концевой выключатель 11, который сигнализирует о наличии заготовки. После этого охват поднимается, и, если им захвачена одна заготовка, то системой управления роботом подается увеличенный ток, если схват не поднял заготовки, то толкатель 7 перемещается в исходное положение. При подъеме большего числа заготовок стакан 4, преодолевая усилие пружины 3, перемещается вниз, и контакты 12, ,13 размыкаются, что служит сигналом на отключение питания электромагнита. 1 ил. а s (О тг 70 13
| Электромагнитный захват | 1980 |
|
SU880714A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
