() МЕХАНИЗМ ПОДАЧИ ВЫЕМОЧНЫХ МАШИН
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения выемочного комбайна | 1986 |
|
SU1652541A1 |
| Механизм перемещения выемочного комбайна | 1986 |
|
SU1666699A1 |
| Механизм подачи выемочной машины | 1988 |
|
SU1652544A1 |
| Механизм подачи горной машины | 1986 |
|
SU1420156A1 |
| Секция механизированной крепи | 1986 |
|
SU1435793A1 |
| Механизм перемещения горного комбайна | 1987 |
|
SU1613603A1 |
| Станок для заклинивания обмоток в пазах якоря электрической машины | 1989 |
|
SU1728910A1 |
| Шагающий механизм перемещения горной машины | 1983 |
|
SU1132010A1 |
| Механизм перемещения горного комбайна | 1984 |
|
SU1196501A1 |
| Выемочно-доставочная машина | 1990 |
|
SU1747688A1 |
I
Изобретение относится к горной промышленнс-гти, преимущественно к устройствам подачи выемочных .машин.
Известен механизм подачи выемочных машин по направляющим, состоящий из корпуса с размещенными на нем захватами и попарно расположенными гидродомкратами 1.
Недостаток данного устройства сложность конструкции и недостаточная эффективность его в работе.
Наиболее близким техническим решением- по достигаемому результату является механизм подачи выемочных машин, включающий гидродомкраты с присоединенными к ним ползунами, связанными круглой направляющей, и гибкие трубопроводы Г2.
Недостаток указанного устройства сложность устройства и сложность его управления, что усложняет автоматизацию процессов управления выемочной машины и снижает надежность работы механизмов.
Цель изобретения - повышение надежности работы.
Указанная цель достигается тем, что механизм подачи, включающий гидродомкраты с присоединенными к ним ползунами, связанными круглой направляющей, и гибкие трубопроводы, снабжен заклинивающими пластинами со скосами, а каждый ползун выполнен в поперечном сечении в виде полукруга, в котором расположена заклинивающая пластина, при этом пластина установлена с возможностью взаимодействия с круглой направляющей и гибкими трубопроводами.
Кроме того, заклинивающие пластины снабжены упругими элементами.
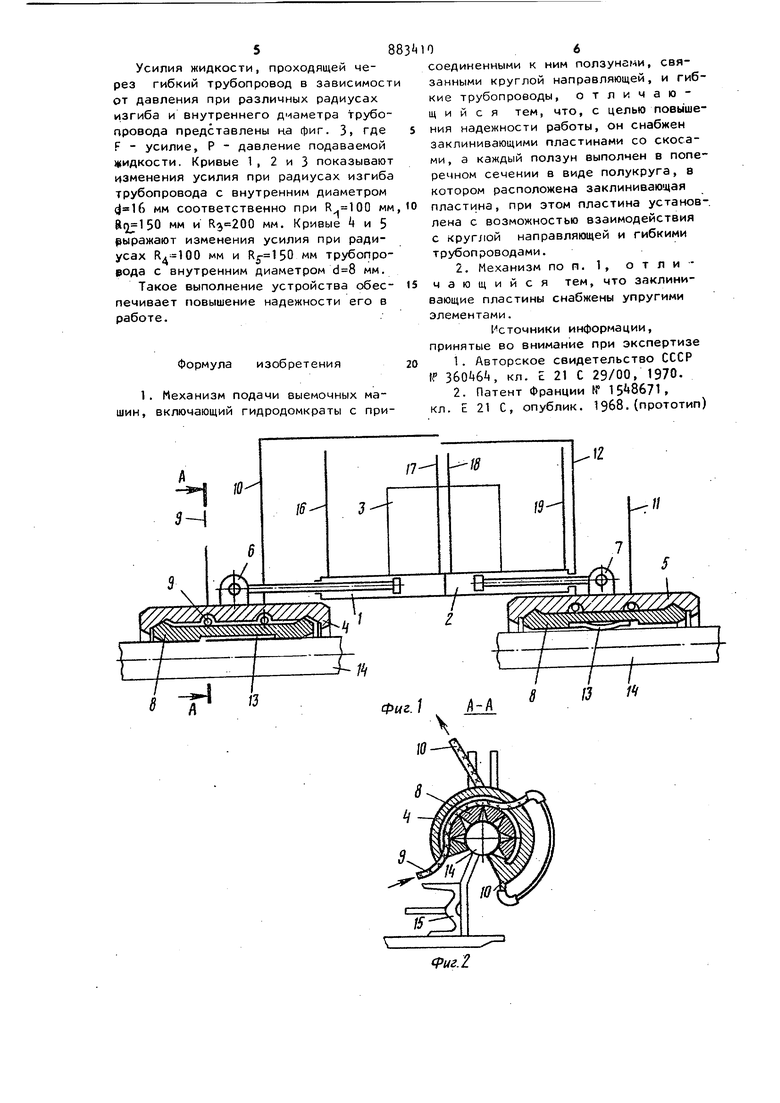
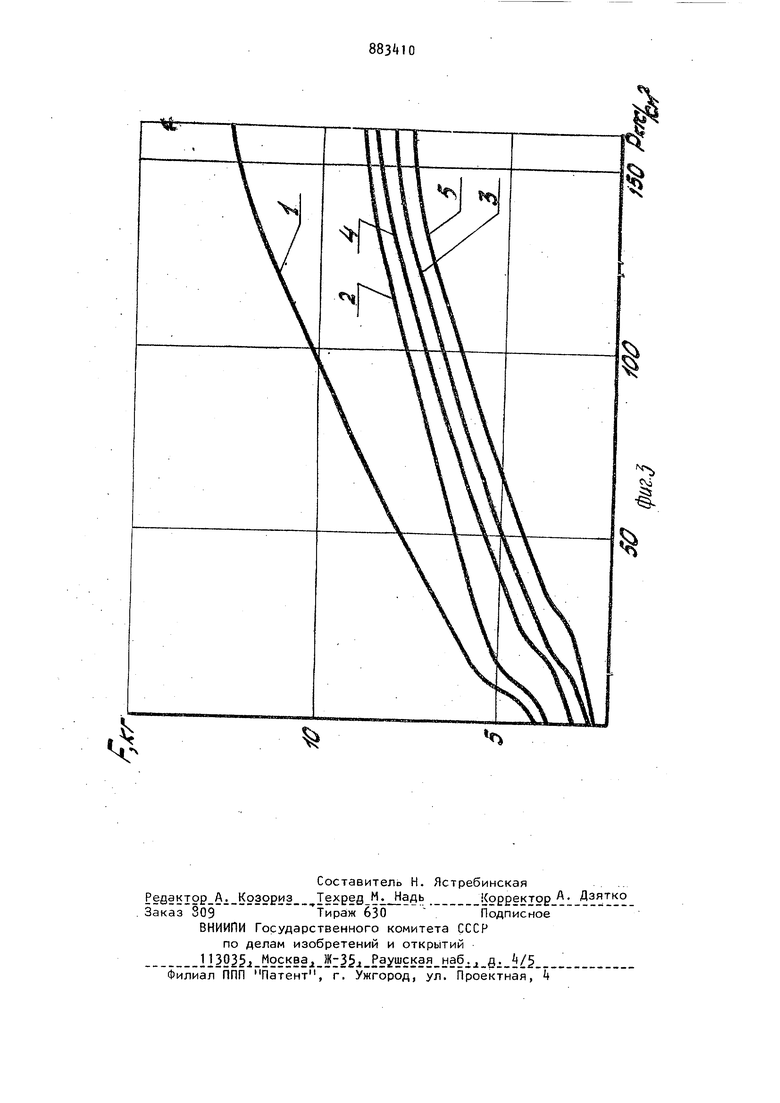
На фиг. 1 показан механизм перемещения, продольное сечение; на фиг. 2 - поперечное сечение А-А на фиг. 1; на фиг. 3 график зависимости усилия жидкости от давления.
Механизм перемещения содержит гидродомкраты 1 и 2, присоединенные одним концом к машине 3, а другим-концом к корпусам и 5, ползунов 6 и 7, внутри которых расположены заклинивающие пластины 8 и охватывающие их гибкие трубопроводы 9 и 10, 11 и 12, Заклинивающие пластины выполнены со скосами на концах и имеют пластин чатые пружины 13, установленные с возможностью взаимодействия с кругло направляющей k, прикрепленной, например, к стопу конвейера 15- Гибкий трубопровод 9 сос щается с гибким трубопроводом 10, а трубопровод П с трубопроводом 12. Ползун работает сг(ед ющим образом. При подаче рабочей жидкости под дав пением она проходит через трубопроводы 9 и 10 14- ;;оздает усили, стремящееся выпрямить огибающие части этих трубопроводов, которые в сво очередь прижимают заклинивающие плас тинь 8 к направляющей 1. Далее рабо чая жидкость подается в полость 16 гидродомкрата 1, при этом в момент подачи жидкости корпус 4 ползуна 6 переместится вправо и заклинивает уже прижатую к направляющей 1 заклинивающую пластину 8. Этим создает сл упор для силового перемещения выемочной машины влево по мере заполне ния полости 16 рабочей жидкостью. Для подготовки ползуна 6 к следующей подаче рабочая -жидкость подае ся в полость 17, а полость 16 и трубопроводы 10 и 9 станут сливными. В этом случае в момент подачи жидкости в полость 17 поршень, перемещаясь влево, выводит корпус k ползуна из заклиненного положения и заклинивающие пластины 8 освобождаясь займу исходное положение под воздействием пружины 13, далее ползун 6 перемещается вхолостую влево на рабочую длин штока. Для перемещения машины влево рабо чая жидкость проходит через гибкие трубопроводы 9 и 10,и подается в полость 16, ползун 6 создает упор дл силового перемещения. Одновременно рабочая жидкость подается в полость 19 гидродомкрата 2 и ползун 7 вхолос тую перемещается влево. Полость 18 . через трубопроводы 12 и 11 и полость 17 работают на слив. При достижении штоков гидродомкратов крайнего полож ния подается импульс, рабочая жид- , кость поступает в полость 17 и через гибкие трубопроводы 11 и 12 в полост З 4 18. В этом случае расклинивается ползун 6 и вхолостую перемещается вправо, а в ползуне 7 под воздействием гибких трубопроводов 1 и 12 закли нивающие пластины прижимаются к направляющей, корпус 5, перемещаясь вправо, заклинивается, и гидродомкрат 2 толкает машину 3 влево на ход штока. 3 этом случае сливными являются полость 1б через трубопроводы 10 и 9 и полость 19Таким образом, попеременно перемещая машину, механизм обеспечивает непрерывную подачу влево. Для перемещения машины вправо трубопровод 10 переключается к полости 17, а трубопровод шланга 12 к полости 19 и перемещение осуществляется аналогично перемещению машины влево. Рабочая жидкость черёз трубопроводы 11 и 12 подается в полости 19 и 16, при этом заклинивающие пластины 8 ползуна 6 касаются направляющей 1 только пружинами и ползун перемещается вхолостую направо, а заклинивающие пластины 8ползуна 7 наоборот прижаты к направляющей под воздействием гибких трубопроводов 11 и 12 и заклинены корпусом 5 поэтому машина перемещается вправо на ход штока гидродомкрата 2, далее подается импульс, жидкость проходит через трубопроводы 9и 10 попадая в полость 17 и одновременно жидкость подается в полость 18 и т.д. В механизме перемещения гибкие трубопроводы служат для подготовки заклинивающих пластин к заклиниванию, а заклинивание осуществляется корпусом ползуна. Возможность управления заклинивания пластинами с помощью гибких трубопроводов была проверена на специальном стенде. Были проверены основные параметры, влияющие на усилие, передаваемое жидкостью, проходящей через гибкий трубопровод. Этими параметрами является давление самой жидкости, внутренний диаметр трубопровода, радиус обхвата (изгиба). Кроме того, влияют физико-механические свойства материала гибкого трубопровода, температура окружающей среды, вязкость рабочей жидкости и т.д. Но влияние этих факторов относительно незначительно, поэтому представлены результаты замеров по основным параметрам. 58 Усилия жидкости, проходящей через гибкий трубопровод в зависимост от давления при различных радиусах изгиба и внутреннего диаметра трубопровода представлены на фиг. 3, где F - усилие, Р - давление подаваемой щидкости. Кривые 1, 2 и 3 показывают изменения усилия при радиусах изгиба трубопровода с внутренним диаметром мм соответственно при R 100 мм R(2j150 мм и мм. Кривые k и S выражают изменения усилия при радиусах мм и мм трубопровода с внутренним диаметром мм. Такое выполнение устройства обеспечивает повышение надежности его в работе. Формула изобретения 1 . Механизм подачи выемочных машин, включающий гидродомкраты с при06соединенными к ним ползунами, связанными круглой направляющей, и гибкие трубопроводы, отличающийся тем, что, с целью повышения надежности работы, он снабжен заклинивающими пластинами со скосами , а каждый ползун выполнен в поперечном сечении в виде полукруга, в котором расположена заклинивающая пластина, при этом пластина установлена с возможностью взаимодействия с круглой направляющей и гибкими трубопроводами. 2. Механизм по п. 1, отличающийся тем, что заклинивающие пластины снабжены упругими элементами. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР К ЗбОАб, кл. с 21 С 29/00, 1970. 2.Патент Франции № 15«8б71, кл. Е 21 С, опублик. 1968.(прототип)
