1
Изобретение относится к области машиностроения и предназначено для автоматизации загрузки-выгрузки деталей в технологическое оборудование и осуществления сборочных операций..5
Известен промышленный робот с дискретным позиционированием, содержащий распределители, систему программного управления и привод линейного перемещения, выполненный в виде многопоршневого ци- ш линдра, корпус которого расположен на подъемно-поворотной стойке 1.
Недостатком известного робота является узость технологических возможностей, обусловленная невозможностью обеспечения 15 управления положением оси схвата в точке позиционирования.
Цель изобретения - расширение технологических возможностей.
Это достигается тем, что промышленный 20 робот снабжен дополнительным приводом и кинематически связанным с ним упором, причем упор установлен с возможностью взаимодействия с поршнем многопоршневого силового цилиндра, имеющим минималь- 25 ное перемещение.
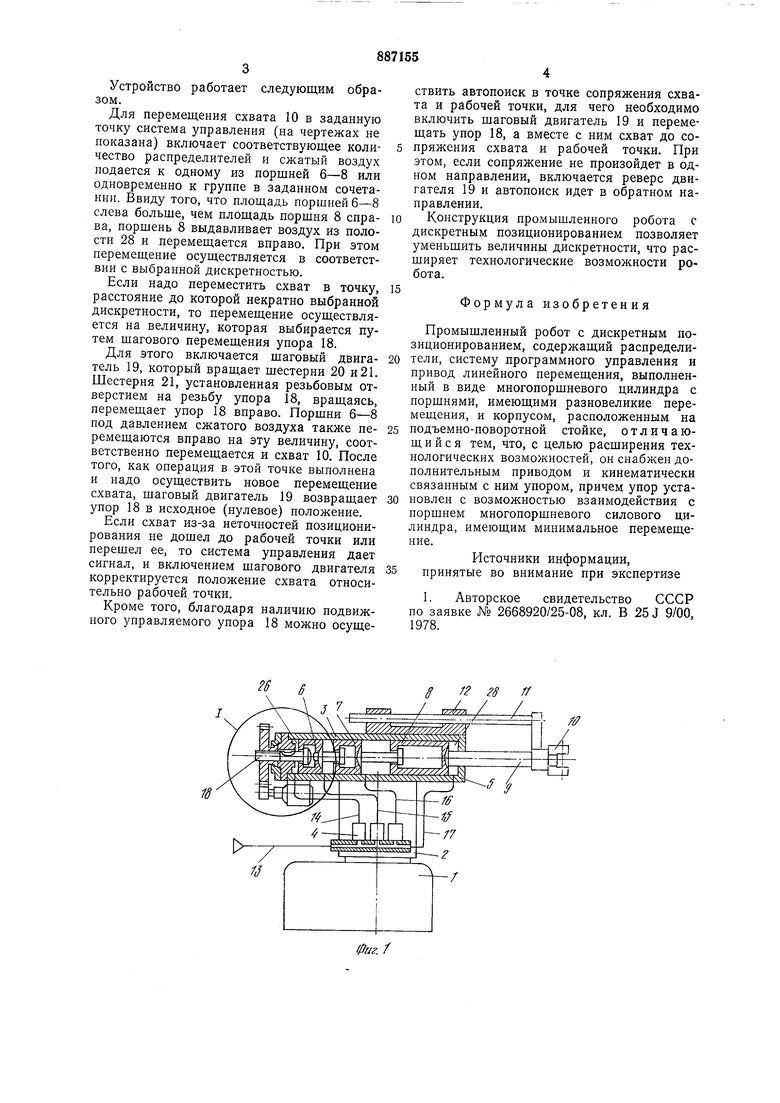
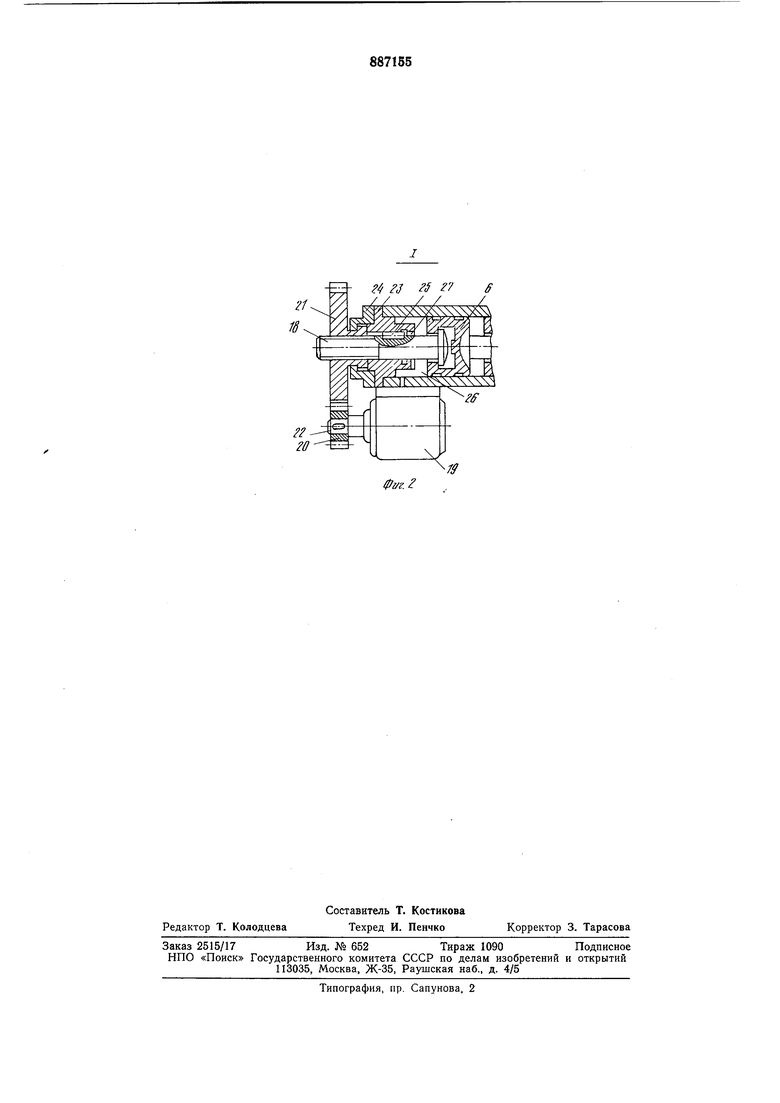
На фиг. 1 изображен промышленный робот, общий вид; на фиг. 2 - узел I на фиг. 1.30
Промышленный робот состоит из основания 1, подъемно-поворотной стойки 2, многопоршневого цилиндра 3 и распределителей 4. Многопоршневой цилиндр состоит из корпуса 5 и поршней 6-8. Поршень 8 имеет штоковую часть 9, на которой закреплен схват 10. Для предотвращения поворота схвата 10 вокруг горизонтальной оси предусмотрены штанга И и направляющая 12, закрепленная к корпусу 5. Шланг 13 подводит воздух к распределителям 4. Шланги 14-16 служат для подвода воздуха соответственно под поршни 6-8, шланг 17 - для подвода воздуха к корпусу 5 и возврата тем самым поршней 6-8 в исходное положение.
Поршень 6 имеет минимальный ход и снабжен упором 18, который имеет дополнительный привод. Привод состоит из шагового двигателя 19, шестерен 20 и 21, установленных соответственно на вал 22 шагового двигателя и на резьбовую часть упора 18. Крышка 23 закрывает заднюю часть пневмоцилиндра 3 и совместно с крышкой 24 образует упорный подшипник, предотвращающий осевое перемещение щестерни 21. Крутящий момент, возникающий на упоре 18 при вращении шестерни 21, воспринимает шпонка 25. Герметичность полости 26 цилиндра 3 обеспечивается уплотнением 27,
Устройство работает следующим образом.
Для перемещения схвата 10 в заданную точку система управления (на чертежах не показана) включает соответствующее количество распределителей и сжатый воздух подается к одному из порщней 6-8 или одновременно к группе в заданном сочетании. Ввиду того, что площадь поршней 6-8 слева больше, чем площадь поршня 8 справа, поршень 8 выдавливает воздух из полости 28 и перемещается вправо. При этом перемещение осуществляется в соответствии с выбранной дискретностью.
Если надо переместить схват в точку, расстояние до которой некратно выбранной дискретности, то перемещение осуществляется на величину, которая выбирается путем шагового перемещения упора 18.
Для этого включается шаговый двигатель 19, который вращает шестерни 20 и 21. Шестерня 21, установленная резьбовым отверстием на резьбу упора 18, вращаясь, перемещает упор 18 вправо. Поршни 6-8 под давлением сжатого воздуха также перемещаются вправо на эту величину, соответственно перемещается и схват 10. После того, как операция в этой точке выполнена и надо осуществить новое перемещение схвата, шаговый двигатель 19 возвращает упор 18 в исходное (нулевое) положение.
Если схват из-за неточностей позиционирования не дощел до рабочей точки или перешел ее, то система управления дает сигнал, и включением шагового двигателя корректируется положение схвата относительно рабочей, точки.
Кроме того, благодаря наличию подвижного управляемого упора 18 можно осуществить автопоиск в точке сопряжения схвата и рабочей точки, для чего необходимо включить шаговый двигатель 19 и перемещать упор 18, а вместе с ним схват до сопряжения схвата и рабочей точки. При этом, если сопряжение не произойдет в одном направлении, включается реверс двигателя 19 и автопоиск идет в обратном направлении.
Конструкция промышленного робота с дискретным позиционированием позволяет уменьшить величины дискретности, что расширяет технологические возможности робота.
Формула изобретения
Промышленный робот с дискретным позиционированием, содержащий распределители, систему программного управления и привод линейного перемещения, выполненный в виде многопорщневого цилиндра с поршнями, имеющими разновеликие перемещения, и корпусом, расположенным на
подъемно-поворотной стойке, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен дополнительным приводом и кинематически связанным с ним упором, причем упор установлен с возможностью взаимодействия с поршнем многопоршневого силового цилиндра, имеющим минимальное перемещение.
Источники информации,
принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке № 2668920/25-08, кл. В 25 J 9/00, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1986 |
|
SU1368166A1 |
| Промышленный робот с дискретным позиционированием | 1978 |
|
SU768631A1 |
| Промышленный робот | 1984 |
|
SU1407787A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Промышленный робот | 1987 |
|
SU1537514A1 |
| Подвесной транспортный робот | 1986 |
|
SU1333571A1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| Автоматический манипулятор | 1981 |
|
SU963846A1 |
| Робот к штамповочному прессу | 1988 |
|
SU1538966A1 |
6 В
