(5) ЗАДАЮЩЕЕ УСТРОЙСТВО МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1989 |
|
SU1668129A1 |
| Манипулятор | 1986 |
|
SU1328187A1 |
| Захват манипулятора | 1979 |
|
SU837855A1 |
| ЭЛЕКТРИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1994 |
|
RU2127924C1 |
| МАНИПУЛЯТОР | 1995 |
|
RU2093346C1 |
| Манипулятор | 1988 |
|
SU1521577A1 |
| Система управления гидравлическим прессом | 1978 |
|
SU734014A2 |
| ПРИВОД МАНИПУЛЯТОРА | 1992 |
|
RU2024387C1 |
| Карусельная автоматическая формовочная машина Набокина | 1982 |
|
SU1031634A1 |
| Задающий механизм манипулятора | 1972 |
|
SU547337A1 |

1
Изобретение относится к машино-. строению, в частности к задающим устройствам манипуляторов с ручным управлением, применяемых для монтажно-сборочных, подъемно-транспортных и других работ, связанных с перемещением тяжелых грузов.
Известно задающее устройство манипулятора, дистанционно управляющее приводом, содерк ащее рукоятку управления и зубчатый механизм, связанный с потенциометром, встроенным в рабочий орган манипулятора lj.
Однако такое устройство не обеспечивает необходимую точность получения заданных характеристик изменения скорости перемещения рабочего органа.
Цель изобретения - повышение точности получения заданных характеристик изменения скорости перемещения рабочего органа.
Цель достигается тем, что устройство снабжено кулачком, жестко
закрепленным на оси рукоятки управления и подпружиненным в осевом направлении толкателем с упорами, взаимодействующими с кулачком, причем толкатель кинематически связан с зубчатым механизмом.
В предлагаемом устройстве упоры установлены с возможностью их регули ровки.
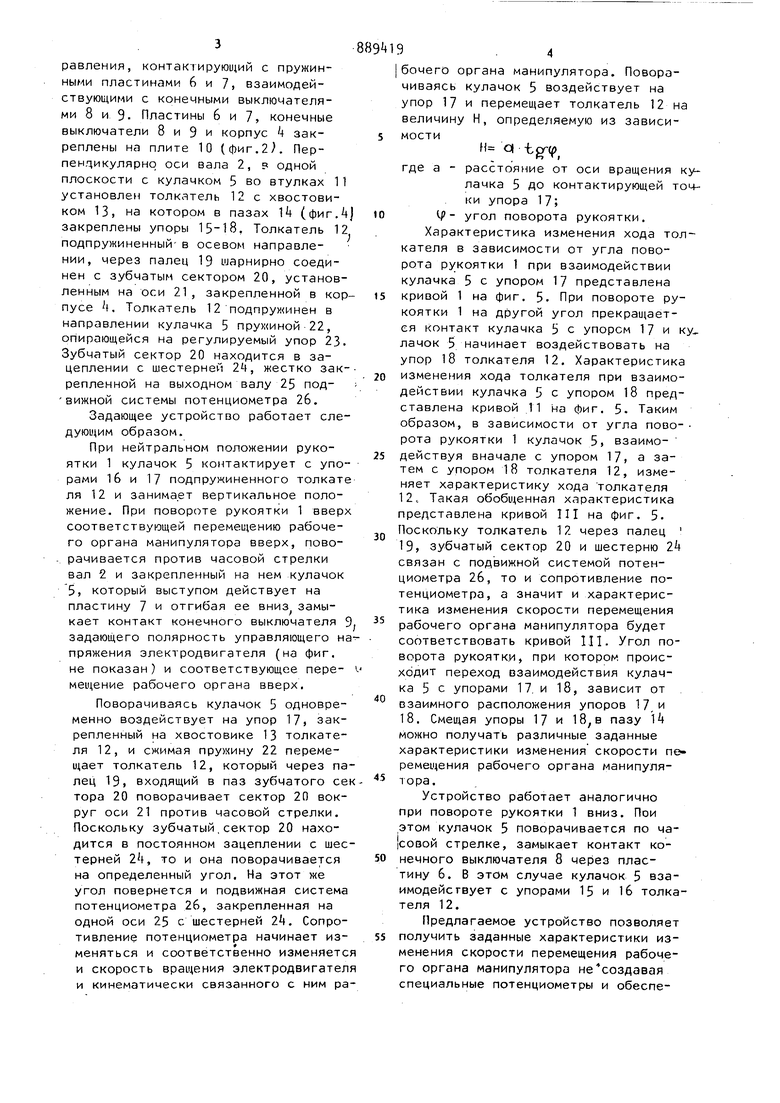
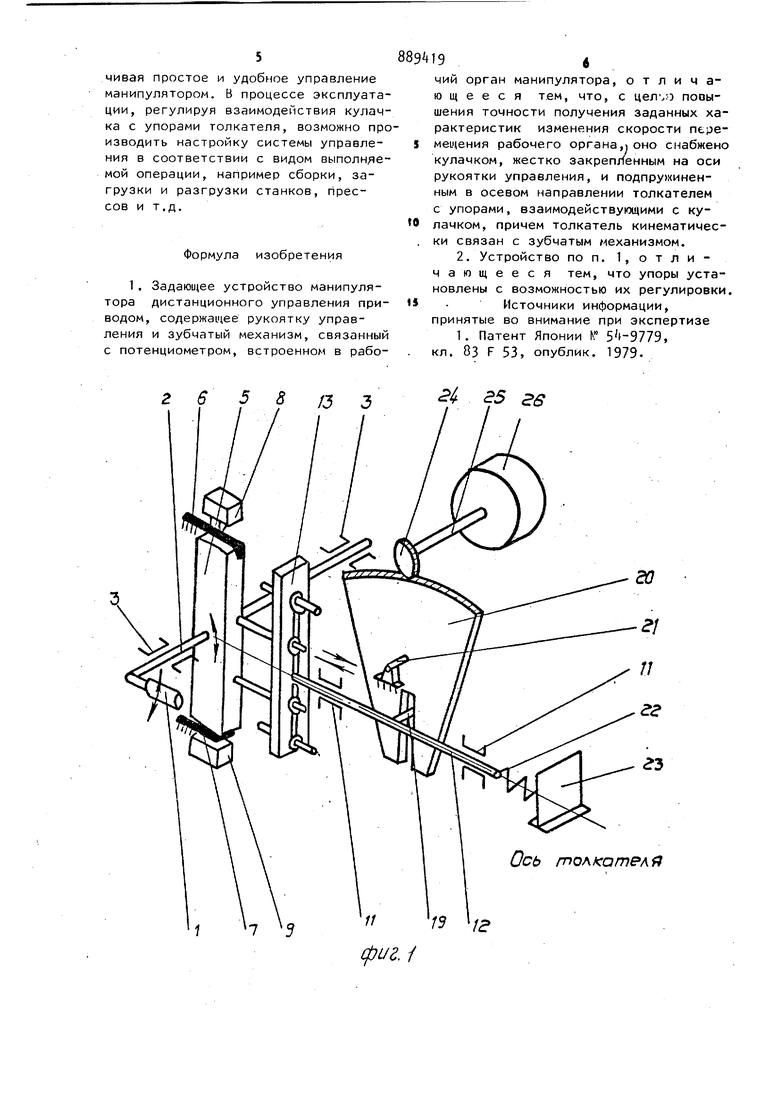
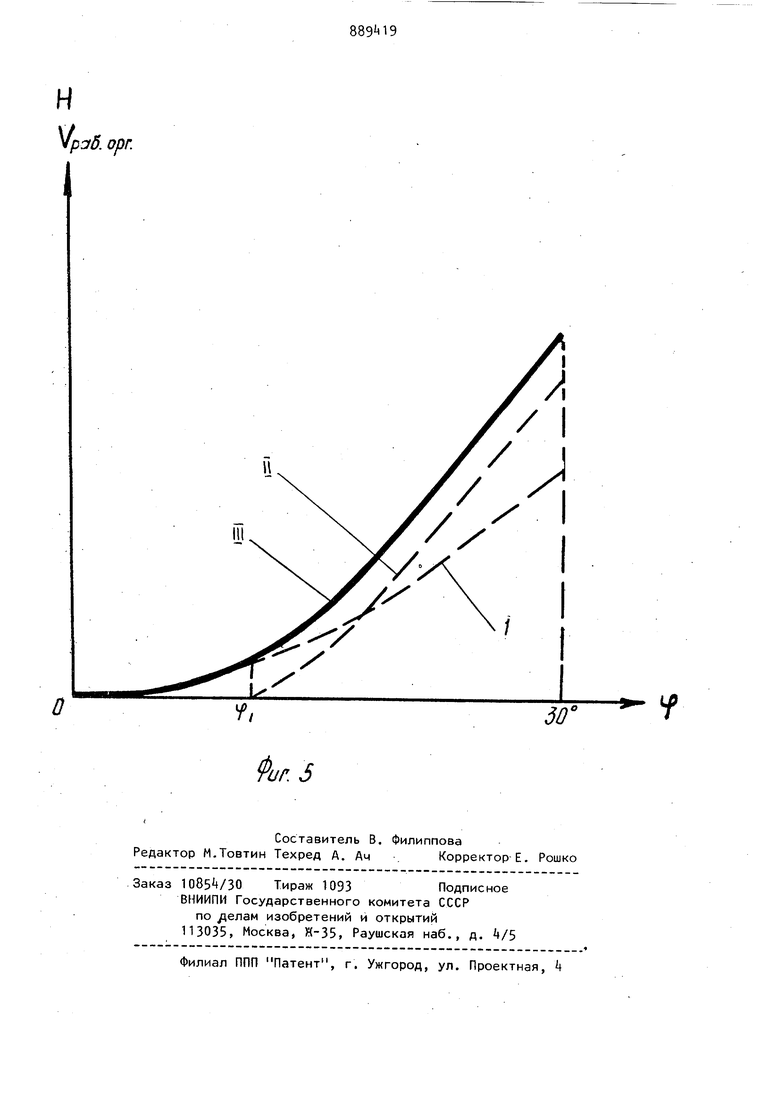
фиг. 1 изображена кинематическая схема устройства; на фиг. 2 устройство, разрез по оси толкателя; на фиг. 3 - разрез Л-А на фиг. 2; на фиг. Л - разрез Б-Б на фиг, 2; на фиг. 5 - кривые зависимости изменения скорости перемещения рабочего органа манипулятора от угла поворота рукоятки управления.
Задающее устройство (фиг.1) состоит из рукоятки 1, закрепленной на валу 2, который установлен в подшипниках 3 корпуса (фиг.2). На валу 2 закреплен кулачок 5| жестко закрепленный на оси рукоятки управления, контактирующий с пружинными пластинами 6 и 7, взаимодействующими с конечными выключателями 8 и 9. Пластины 6 и 7, конечные выключатели 8 и 9 и корпус 4 закреплены на плите 10 (фиг.2. Перпендикулярно оси вала 2, р одной плоскости с кулачком 5 во втулках 1 1 установлен толкатель 12 с хвостовиком 13, на котором в пазах k (фигЛ закреплены упоры 15-18, Толкатель 12 подпружиненный-в осевом направлении, через палец 19 шарнирно соединен с зубчатым сектором 20, установленным на оси 21, закрепленной в корпусе , Толкатель 12 подпружинен в направлении кулачка 5 пружиной 22, опирающейся на регулируемый упор 23. Зубчатый сектор 20 находится в зацеплении с шестерней 24, жестко закрепленной на выходном валу 25 подвижной системы потенциометра 26. Задающее устройство работает следующим образом. При нейтральном положении рукоятки 1 кулачок 5 контактирует с упорами 16 и 17 подпружиненного толкате ля 12 и занимает вертикальное положение. При повороте рукоятки 1 вверх соответствующей перемещению рабочего органа манипулятора вверх, пово- рачивается против часовой стрелки вал 2 и закрепленный на нем кулачок 5, который выступом действует на пластину 7 и отгибая ее вниз замыкает контакт конечного выключателя 9 задающего полярность управляющего на пряжения электродвигателя (на фиг. не показан) и соответствующее перемещение рабочего органа вверх. Поворачиваясь кулачок 5 одновременно воздействует на упор 17, закрепленный на хвостовике 13 толкателя 1 2 , и сжимая пружину 22 перемещает толкатель 12, который через па лец 19, входящий в паз зубчатого се тора 20 поворачивает сектор 20 вокруг оси 21 против часовой стрелки. Поскольку зубчатый,сектор 20 находится в постоянном зацеплении с шес терней 2k, то и она поворачивается на определенный угол. На этот же угол повернется и подвижная система потенциометра 26, закрепленная на одной оси 25 с шестерней 2k, Сопротивление потенциометра начинает изменяться и соответственно изменяетс и скорость вращения электродвигател и кинематически связанного с ним ра . 4 бочего органа манипулятора. Поворачиваясь кулачок 5 воздействует на упор 17 и перемещает толкатель 12 на величину Н, определяемую из зависимостин а t(() где а - расстояние от оси вращения кулачка 5 до контактирующей точки упора 17; (f - угол поворота рукоятки. Характеристика изменения хода толкателя в зависимости от угла поворота рукоятки 1 при взаимодействии кулачка 5 с упором 17 представлена кривой 1 на фиг. 5. При повороте рукоятки 1 на другой угол прекращается Контакт кулачка 5 с упором 17 и ку, лачок 5 начинает воздействовать на упор 18 толкателя 12. Характеристика изменения хода толкателя при взаимодействии кулачка 5 с упором 18 представлена кривой 11 на фиг. 5. Таким образом, в зависимости от угла пово- рота рукоятки 1 кулачок 5, взаимодействуя вначале с упором 17, а затем с упором 18 толкателя 12, изменяет характеристику хода толкателя 12. Такая обобщенная характеристика представлена кривой П1 на фиг. 5. Поскольку толкатель 12 через палец 19, зубчатый сектор 20 и шестерню 2k связан с подвижной системой потенциометра 26, то и сопротивление потенциометра, а значит и характеристика изменения скорости перемещения рабочего органа манипулятора будет соответствовать кривой III. Угол поворота рукоятки, при котором происходит переход взаимодействия кулачка 5 с упорами 17. и 18, зависит от взаимного расположения упоров 17,и 18. Смещая упоры 17 и 18, в пазу Н можно получать различные заданные характеристики изменения скорости перемещения рабочего органа манипулятора. Устройство работает аналогично при повороте рукоятки 1 вниз. Пои этом кулачок 5 поворачивается по ча|совой стрелке, замыкает контакт конечного выключателя 8 через пластину 6. В этом случае кулачок 5 взаимодействует с упорами 15 и 16 толкателя 12. Предлагаемое устройство позволяет получить заданные характеристики изменения скорости перемещения рабочего органа манипулятора не создавая специальные потенциометры и обеспе5чивая простое и удобное управление манипулятором. В процессе эксплуатации, регулируя взаимодействия кулачка с упорами толкателя, возможно про изводить настройку системы управления в соответствии с видом выполняемой операции, например сборки, загрузки и разгрузки станков, ripecсов и т.д. Формула изобретения 1. Задающее устройство манипулятора дистанционного управления приводом, содержащее рукоятку управления и зубчатый механизм, связанный с потенциометром, встроенном в рабо 7 5 5 гбОсь т 75 /г
ф1/г. i 19 чий орган манипулятора, отличающееся т.ем, что, с цел .:о повышения точности получения заданных характеристик изменения скорости перемещения рабочего органа, оно снабжено кулачком, жестко закрепленным на оси рукоятки управления, и подпру, иненным в осевом направлении толкателем с упорами, взаимодействующими с кулачком, причем толкатель кинематически связан с зубчатым механизмом. 2. Устройство по п. 1, о т л и чающееся тем, что упоры установлены с возможностью их регулировки. Источники информации, принятые во внимание при экспертизе К Патент Японии М 5и9779, кл. 83 F 53, опублик. 1979. олкатели 6 S /5 fo
Фиг. 2 2k 22 ti гз
А-Л
игЛ
