1
Изобретение .относится к области обработки металлов давлением.
Известна система управл ения гидравлическим прессом, по основному авт.св. № 513885, содержащая рабочий цилиндр, соединенный с насосом через распределитель, управляемый установленной на станине рукояткой, связанной через тягу с подпружиненным рычагом, один конец которого соединен .шарнирно с распределителем, а другой - с подпружиненным толкателем, а также соединенную со штоком рабочего цилиндра штангу, несущую отключающий кулачок и механизм коротких ходов, подваиенный на гибком элементе к станине и выполненный в виде кронштейна с размещенным на нем поворотным кулачком с рукояткой и подпружиненным фрикционным элементом.
Недостаток известной системы заключается в нестабильной работе механизма коротких ходов, сложности ее конструкции, настройки и регулировки. Это связано с тем, что в работе механизма коротких ходов заложен принцип свободного клинения по гладким цилиндрическим поверхностям за счет перекоса кронштейна
при перемещении штанги. Наличие tteлишней смазки, увеличение зазора в сопрягаемых деталях кронштейна и штанги при эксплуатации делают работу систеглл енадежной .
Целью изобретения является повышение надежности и срока службы системы.
Цель достигается тем, что меха0 низм коротких ходов снабжен стопорным устройством, выполненным в виде зубчатого сектора, взаимодействующего со штангой и шарнирно закрепленного на подвижном подпружиненном
15 штоке, контактирующем с поворотным кулачком.
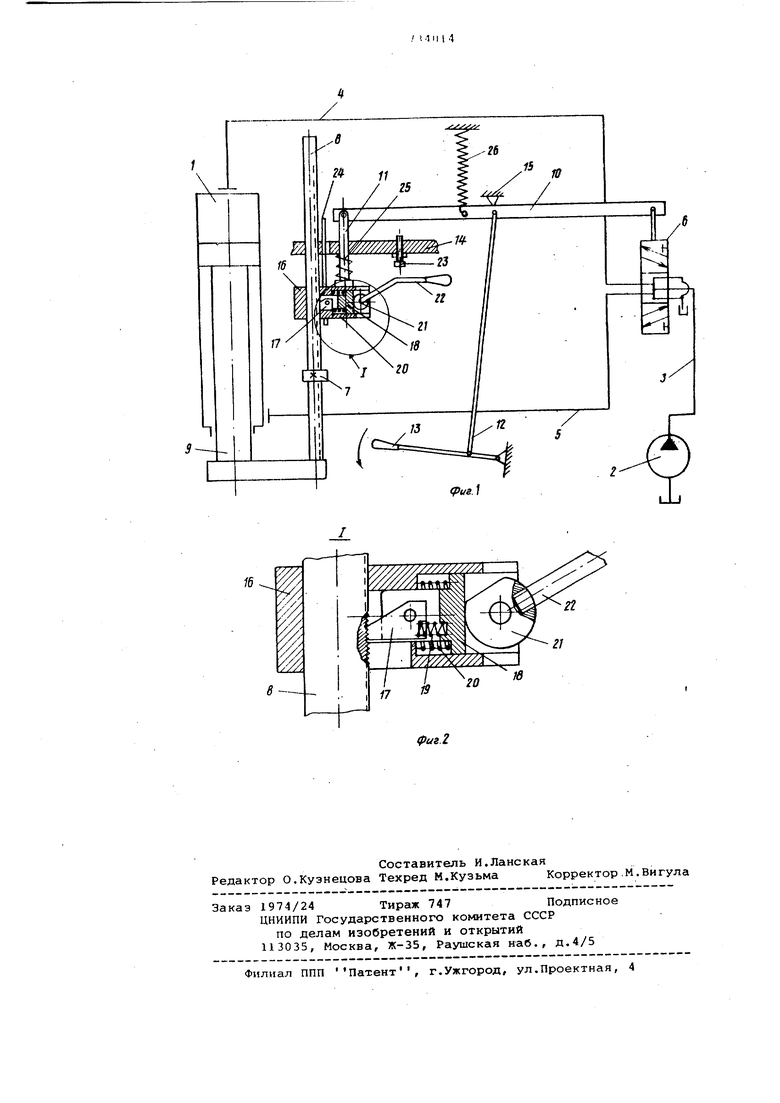
На фиг.1 изображена предлагаемая система, гидрокинематическая схема/на фиг.2 - стопорное устройство механизма коротких ходов, вид по стрелке I на фйг.1.
Система управления гидравлическим прессом срдержит рабочий ЦИЛИН.ДР 1, насос 2, трубопроводы 3,4 и 5, распределитель 6, отключающий кулачок 7, установленный на штанге 8, связанной со штоком 9, рычаг 10, один конец которого связан с толкате- лем 11, а другой - с распределителем 6. В средней части рычаг 10 шар
нирно соединен с тягой 12, посредством которой он связан с рукояткой 13 управления. Над точкой сочленения рычага 10 с тягой 12 установлен на станине 14 упор 15.
На штанге 8 размещен кронштейн 16 механизма коротких ходов. Внутри кронштейна 16 расположен зубчатый сектор 17, шарнирно закрепленный на подвижном штоке 18 и зафиксированный пружиной 19. Шток 18 подпружинен пружиной 20 и постоянно контактирует с поворотным кулачком 21, имеющим рукоятку 22, связанную с регулировочным упором 23. Гибкий элемент 24 связывает кронштейн 16 со станиной 1 Для возвращения распределителя 6 в верхнее положение предусмотрены пружины 25 и 26.
Система управления гидравлическим прессом работает следую цим образом.
При перемещении рукоятки 13 управления вниз тяга 12 опускается, а. связанный с нею рычаг 10 отходит от упора 15. Распределитель 6 перемещается вниз, и рабочая жидкость от насоса 2 по трубопроводу 3 через распределитель 6 и трубопровод 4 поступает в поршневую полость цилиндра 1. Шток 9 цилиндра 1 и связанная с ним штанга 8 опускается. При этом кронштейн 16 опускается со штангой 8 до тех пор, пока гибкий элемент 24 не окажется в натянутом состоянии.
При Дс1льнейшем ходе штока 9 и штанги 8 вниз, кронштейн 16 остается -неподвижным на гибком элементе 24 а зубчатый сектор 17 стопорного устройства механизма коротких ходов, взаимодействуя со штангой 8 при ее движении вниз, поворачивается на оси штока 18 против часовой стрелки и тем самым свободно пропускает штангу 8.
Вся система подготовлена к выполнению короткого хода вверх.
Движением штока 9 вниз ооуществлйется деформация заготовки. Для контроля деформации- заготовки шток 9 необходимо поднять, для чего рукоятка 13 управления отпускается, при этом рычаг 10 под действием пружины 25 поднимается до упора 15, перемещая распределитель 6 вверх, и жидкость от насоса 2 по трубопроводам 3 и 5 поступает в штоковую полость цилиндра 1, а жидкость из поршневой полости цилиндра 1 по трубопроводу 4 и распределителю 6 идет на слив. Шток 9 и штанга 8 поднимаются. Поскольку зубчатый сектор постоянно взаимодействует со штангой 8 то при ее движении вверх зубчатый сектор 17 поворачивается на оси штока 18 по часов.ой стрелке и происходит заклинивание кронштейна 16 и штанги В. Начинается совместное перемещение штанги 8 и кронштейна 16 вверх. Гибкий элемент 24 освобождается от натяжения. При дальнейшем совместном движении штанги 8 и кронштейна 16 вверх, последний, взаимодействуя с толкателем 11, поворачивает рычаг 10 по часовой стрелке относительно упора 15. Распределитель 6 переводится в нейтральное положение. Шток 9 останавливается, отойдя от заготовки на расстояние, равное расстоянию между кронштейном И толкателем 11, регулируемое гибки элементом 24.
Для съема обработанной заготовки и установки новой необходимо поднят шток 9 в крайнее вер.хнее положение. Для этого рукоятку 22,закрепленную на поворотном кулачке 21, поворачивают вверх, и подвижный шток 18 под действием пружины 20, отходит вправ увлекая зубчатый сектор 17 за собой и тем самым выводя его из зацепления со штангой 8, и происходит расклинивание кронштейна 16 со штангой 8.
Освобожденный от действия кронштейна 16 толкатель 11 усилием пружины 26 перемещается вниз вместе .с кронштейном 16, и, поворачивая рычаг 10, перемещает распределитель в верхнее положение.
Движение штока 9 вверх продолжается до тех пор, пока отключающий кулачок 7, перемещающийся вместе со штангой 8, не достигнет кронштейна и вместе с ним толкателя 11, которы через рычаг 10 выводит распределитель 6 в нейтральное положение. В момент вывода распределителя 6 в нетральное положение рукоятка 22 упирается в регулировочный упор 23 на станине 14 и кулачок 21 поворачивается в рабочее положение, шток 18, сжимая пружину 20, перемещается влево, и зубчатый сектор 17 входит во взаимодействие со штангой 8.
После установки новой заготовки или замены инструмента система готова к работе в описанном порядке.
Формула изобретения
Система управления гидравлическим прессом по авт.св.( 513885, отличающаяся тем, что, с целью
55 повышения надежности и срока службы, механизм коротких ходов снабжен стопорным устройством, выполненным в виде зубчатого сектора, взаимодействующего со штангой и шарнирно за4Q крепленного на подвижном подпружиненном штоке, контактирующем с поворотным кулачком.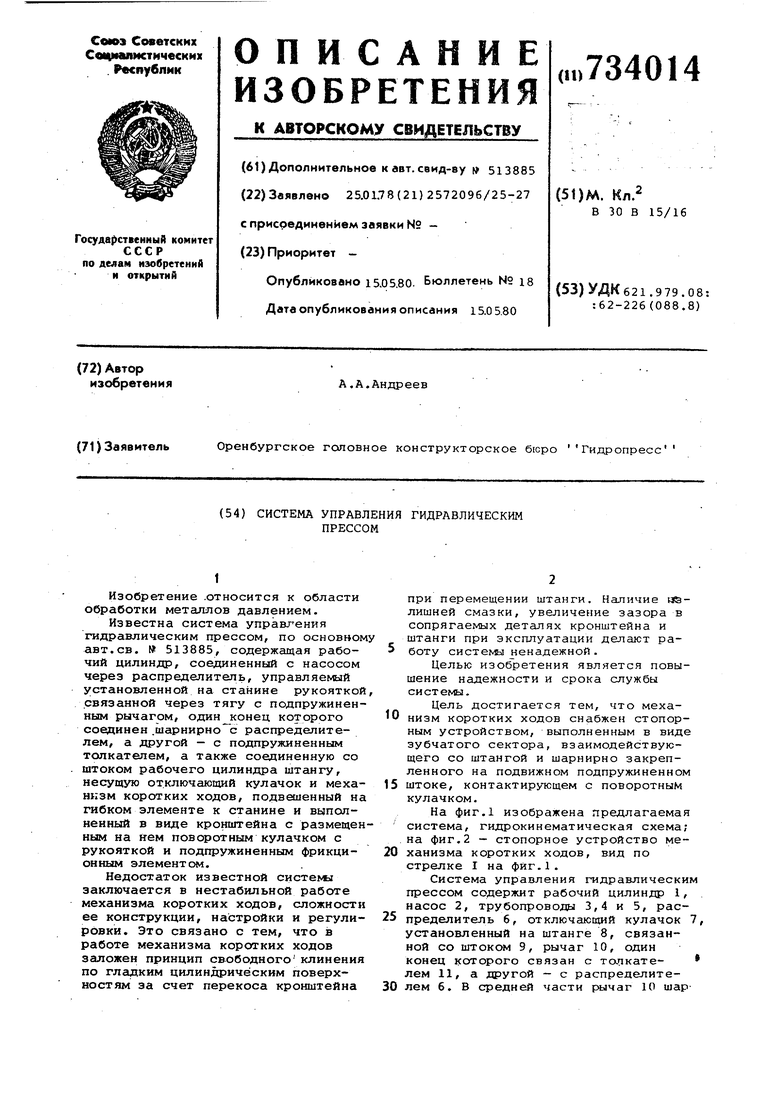
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидравлическим прессом | 1975 |
|
SU513885A1 |
| Винтовой пресс | 1988 |
|
SU1523394A1 |
| Полуавтомат для пространственной гибки труб | 1986 |
|
SU1378985A1 |
| Устройство для гибки деталей | 1985 |
|
SU1360849A2 |
| Система управления гидравлическим прессом | 1982 |
|
SU1141019A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1972 |
|
SU345021A1 |
| Автомат для изготовления пружинных колец | 1982 |
|
SU1063517A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Сверлильный станок | 1985 |
|
SU1355369A1 |
| Устройство для изготовления пружинных колец | 1981 |
|
SU1047571A1 |