(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАЗГРУЗОЧНОЙ ЩЕЛИ КОНУСНОЙ ДРОБИЛКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования разгрузочной щели конусной эксцентриковой дробилки | 1978 |
|
SU749429A1 |
| Устройство для регулирования производительности конусной дробилки | 1982 |
|
SU1039561A1 |
| Система управления дробильной установки | 1985 |
|
SU1281303A1 |
| Устройство для обмена данными между процессором и периферийными устройствами | 1983 |
|
SU1167615A1 |
| Устройство для измерения размера разгрузочной щели конусной дробилки | 1977 |
|
SU733725A1 |
| Устройство для информационного сопровождения игры в баскетбол | 1992 |
|
SU1837917A3 |
| Устройство для контроля размера разгрузочной щели конусной дробилки | 1982 |
|
SU1049103A1 |
| Устройство микропроцессорного управления и обработки информации | 1979 |
|
SU947867A1 |
| Кассовый регистратор | 1979 |
|
SU809192A1 |
| Устройство для управления работой дробильной установки | 1981 |
|
SU961777A1 |
1
Изобретение относится к дроблению различных материалов и преимущественно может быть использовано в промышленности строительных материалов, в черной и цветной металлургии.
Известно устройство для регули- . рования разгрузочной щели, содержащее тидроцилиндры, кожух с храповиком и контргайку. Изменение ширины разгрузочной щели производится путем ввинчивания или вывинчивания дробильной чаши из опорного кольца дробилки 1.
Недостатком известного устройства является отсутствие автоматического контроля размера щели при регулировании и автоматической установке нулевой щели.
Наиболее близким к предлагаемому по технической сущности является устройство для .регулирования разгрузочной щели конусной дробилки, содержащее храповик, механически свя,ванный с регулировочным кольцом и исполнительными механизмами, блок преобразования, детектор, силовой блок и микропроцессор вход которого подключен к блоку управления 2. .
Одним из основных недостатков известного устройства снижающих его
надежность является сложность управления микропроцессором, так как датчики и другие периферийные блоки подключены непосредственно ко входам микропроцессора. Кроме того, конструкция микропроцессора сугубо
индивидуальна
так как может
быть реализована на базе элементов россыпью. В силу конструктивных
10 особенностей микропроцессора, который не обеспечивает оптимального согласования сигналов от датчиков с алгоритмом управления исполнительных механизмов., при ремонте и наст15ройке иг:вестное устройство тяжело перестраивается и регулируется.
Цель изобретения - повышение надежности устройства.
Указанная цель достигаетсяТем,
20 что в устройство для регулирования разгрузочной щели конусной дробилки, содержащее храповик, механически связанный с регулировочным кольцом и исполнительными механизмами,
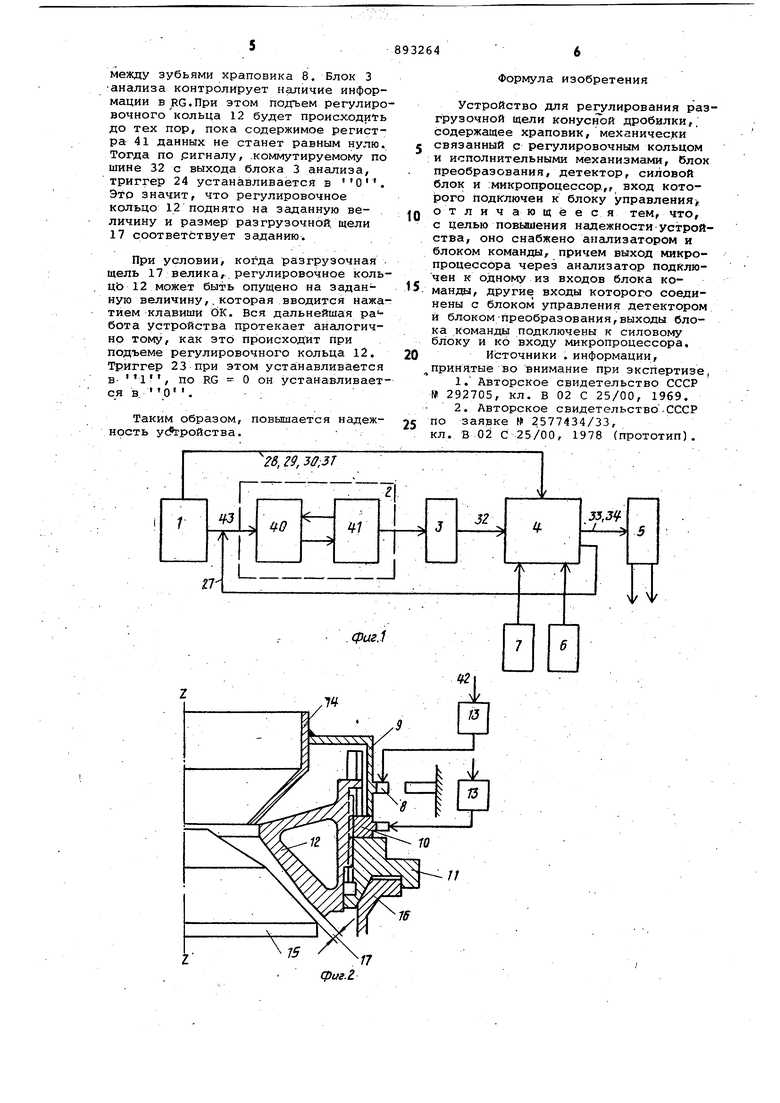
25 блок преобразования, детектор, силовой блок и микропроцессор, вход которого подключен к блоку управления, снабжено анализатором и блоком команды, причем выход мйкропроцес30сора через анализатор подключен к одному из входов блока команды, другие входы которого соединены с блоком управления, детектором и блоком преобразования, выходы блока команды подключены к силовому блоку и ко входу микропроцессора. . На фиг. 1 представлена блок-схема устройства; на фиг. 2 - расположение отдельных элементов в устройстве; на фиг. 3 - функциональная схема блока выработки команд и детектора нулевой щели. Устройство содержит блок 1 управления, микропроцессор 2, блок 3 анализа содержимого регистра данных микропроцессора, блок 4 выработки команд, силовой блок 5, детектор 6 нулевой щели, блок 7 преобразования перемещения контролируемого элемент дробилки, например храповика 8 (фиг в электрический сигнал. Храповик 8,механически связан посредством кожуха 9, контргайки 10 и опорного кольца 11 с регулировочным кольцом 12. Вращение кожуха 9 и как следствие, регулировочного кольца 12 вокруг вертикальной оси ZZ дробилки и их стопорение осуществляется с помощью исполнительных механизмов 13 (например гидроцилиндров, пружинно-гидравлических блоков взаимодействующих, в частности, с храповиком 8 и контргайкой 10. Устройство содержит также .воронку 14, конус 15, корпус 16 и разгрузочную щель 17 дробилки. Блок 4 выработки команд совокупно с его периферийными узлами и свя зями с другими блоками устройства (фиг. 3) включает .в себя четыре эле мента ИЛИ 18--21, три RG-триггера 22 23 и 24, элемент И-ИЛИ 25 и блок 26 формирования кодов. Последний осуществляет операцию кодирования информации, поступающей на его вход, и коммутацию кодовых сигналов по ши не 27 на соответствующий вход микро процессора 2. Числами- 28-31 помечены шины уста новки нулевой щели (УО) опускания (ОК) и подъема (ПК) регулировочного кольца 12 и сброса триггеров 22, 23 и 24 соответственно; числом 32 помеченй связь блока анализа с блоком выработки команд, а числами 33 и 34 шины для коммутации команд исполнительных механизмов на опускание и подъем.регулировочного кольца 12 соответственно. Блок 7 преобразования включает в себя датчик 35 перемещения и комп ратор-формирователь 36 импульсов. Детектор 6 нулевой щели содержит датчик 37 контроля нулевой разгру3очной, вдели 17 (например, датчик давления жидкости в гидроцилиндре 3 исполнительных механизмов 13), компар&тор-формирователь 39 импульсов. Детектор 6 вырабатывает импульсный сигнал в момент соприкосновения конуса 15 с регулировочным КОЛЬЦОМ 12 при опускании последнего. Микропроцессор 2 включает в себя арифметико-логическое устройство 40 и регистр 41 данных (RG) . В качесттве микропроцессора 2 может быть использован электронный калькулятор на четыре действия, в том числе при работе с константой. Блок 1 управления представляет собой клавиатуру для ввода данных о перемещении регулировочного кольца 12 и, в частности/ включает в себя цифровое индика торное устройство. (не показано). Устройство работает следующим образом. При неработающей дробилке с помощью блока 1 управления нажатием клавиши производится обнуление триггеров 22, 23 и 24 и регистра 41 данных. Управляющие сигналы при этом коммутируются по шине 31 для сброса триггеров и по шине 42 данных соотв:етственно. Далее при нажатии клавиши УО блок 1 управления вырабатывает управляющий сигнал/ который коммутируется по шине 28 установки нулевой щели и переводит триггер 22 в состояние . При этом вырабатывается команда на опускание регулировочного кольца 12. Эта команда по шине 33 передается на силовой блок 5 исполнительных механизмов 13 и проходит она до тех пор пока регулировочное кольцо 12: не опустится до механического контакта с конусом 15. В момент соприкосновениа последних давление жидкости в гидроцилиндре 38, например, толкателя регулировочного кольца 12, начинает возрастать, и при достижении определенной его величины детектор 6 нулевой щели вырабатывает импульсный сигнал, который переводит триггер 22 в состояние О. На этом процесс опусканд1я регулировочного кольца 12 завершается, нулевая щель считается установленной. Следующий этап регулирования сводится к установке, нужного размера разгрузочной щели 17. Для этого в регистр 41 данных (RG) вводится, вопервых, задание нд нужный размер щели и константа, соответствующая, например, шагу зубьев храповика 8. Затем при нажатий клавиши ПК блок 1 управления вырабатывает управляющий сигнал, котрЕ 1й. коммутируется по ши не 30 и устанавливает триггер 24 в 1 , и тогда по шине 34 передается команда исполнительным механизмам для подъема регулировочного кольца 12,. Одновременно по сигналу от датчика 35 перемещения храповика 8 блок формирования кодов 26 вырабатывает ;код вычитания (-) и от содержимого RG 41 вычитается число, равное шагу
между зубьями храповика 8, Блок 3 анализа контролирует наличие информации вкс.При этом подъем регулировочного кольца 12 будет происходить до тех пор, пока содержимое регистра 41 данных не станет равным нулю. Тогда по .сигналу, .коммутируемому по шине 32 с выхода блока 3 анализа, триггер 24 устанавливается в О. Это значит, что регулировочное кольцо 12 поднято на заданную величину и размер разгрузочной щели 17 соответствует заданию.
При условии, когда разгрузочная щель 17 велика,., регулировочное кольцЬ 12 может быть опущено на заданную величину,,которая вводится нажаг тием клавиши ОК. Вся дальнейшая ра бота устройства протекает аналогично тому, как это происходит при подъеме регулировочного кольца 12. Триггер 23 при этом устанавливается
, по RG О он устанавливаетв ся в О .
Таким образом, повышается надежность у гройства.
Формула изобретения
Устройство для регулирования разгрузочной щели конусной дробилки,, содержащее храповик, механически связанный с регулировочным кольцом
:и исполнительными механизмами, блок преобразования, детектор, силовой блок и :микропроцессор,, вход которого подключен к блоку управления-, отл ич ающё е ся тем, что,
0 с целью повьлиения надежности устройства, оно снабжено анализатором и блоком команды/ причем выход микропроцессора через анализатор подключен к одному из входов блока ко5манды, другие входы которого соединены с блоком управления детектором и блокомпреобразования,выходы блока команды подключены к силовому блоку и ко входу микропроцессора.
0 Источники . информации,
принятые во внимание при экспертизе,
- 2. Авторское свидетельство .СССР 5 по заявке № 2577434/33,
кл. В 02 С 25/00, 1978 (прототип).
