(54) СХВАТ МАНИПУЛЯТОРА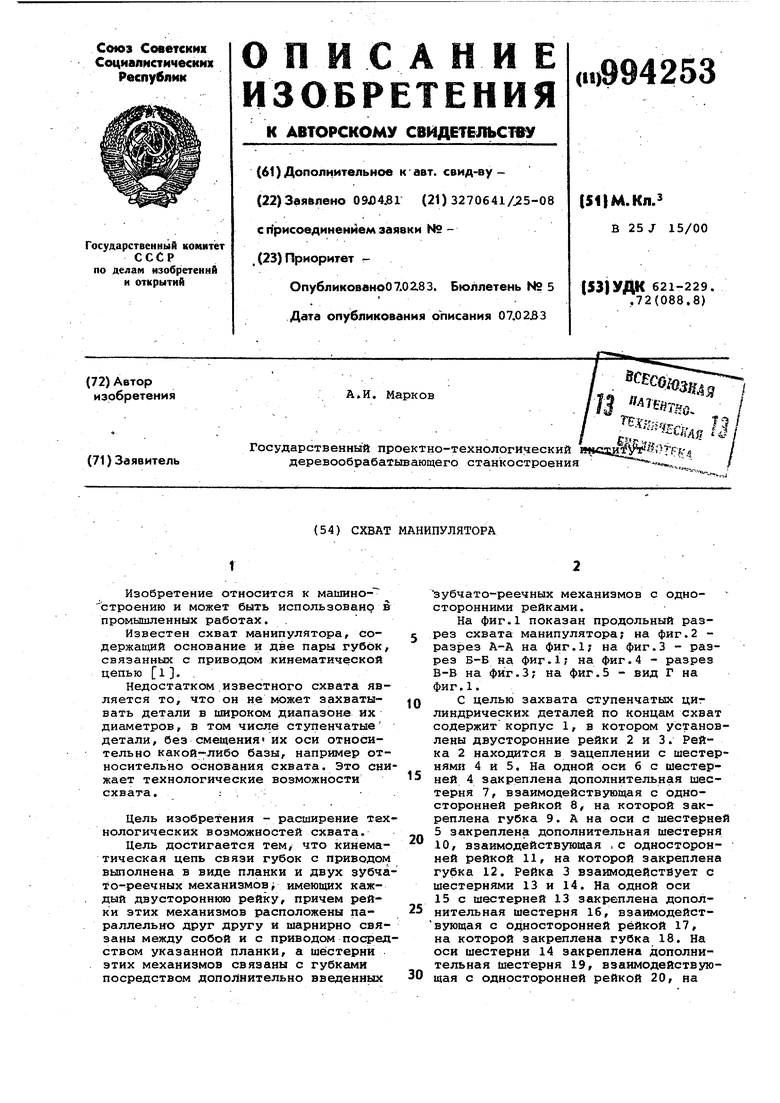
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Схват манипулятора | 1985 |
|
SU1265043A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Схват промышленного робота | 1980 |
|
SU895650A1 |
| СХВАТ МАНИПУЛЯТОРА | 1990 |
|
RU2105665C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
Изобретение относится к машино- строению и может быть использовано в промышленных работах.
Известен схват манипулятора, содержащий основание и две пары губок, связанных с приводом кинематической цепью l . .
Недостатком.известного схвата является то, что он не может захватывать детали в широком диапазоне их диаметров, в том числе ступенчатые детали, без смгацения их оси относительно какой-либо базы, например относительно основания схвата. Это снижает технологические возможности схвата, ; ,
Цель изобретения - расширение технологических возможностей схвата.
Цель достигается тем, что кинематическая цепь связи губок с приводом выполнена в виде планки и двух зУбчато-реечных механизмов j имеющих каждый двустороннюю рейку, причем рейки этих механизмов расположены параллельно друг другу и шарнирно связаны между собой и с приводом посредством указанной планки, а шестерни этих механизмов связаны с губками посредством дополнительно введенных
зубчато-реечных механизмов с односторонними рейками.
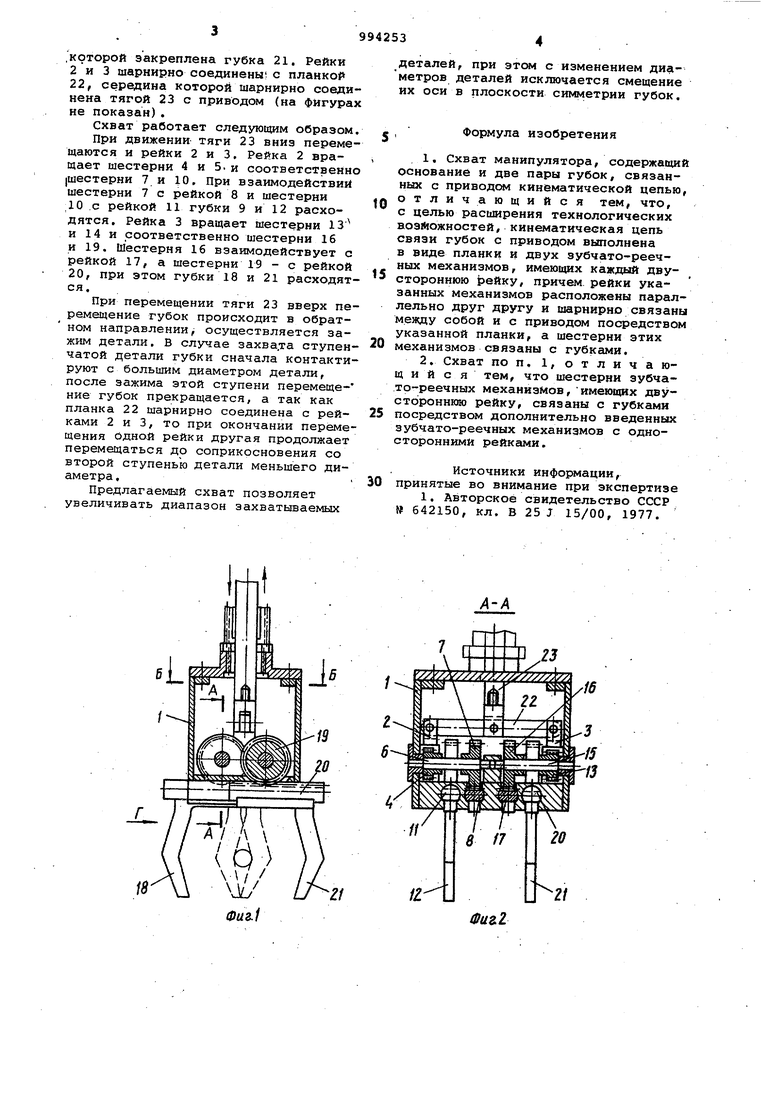
На фиг.1 показан продольный разрез схвата манипулятора; на фиг.2 разрез А-А на фиг,1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - разрез В-В на фиг.З; на фиг.5 - вид Г на фиг,1,
С целью захвата ступенчатых циг
10 линдрических деталей по концам охват содержит корпус 1, в котором установлены двусторонние рейки 2 и 3, Рейка 2 находится в зацеплении с шестернями 4 и 5, На одной оси 6 с шестер15ней 4 закреплена дополнительная шестерня 7, взаимодействующая с односторонней рейкой 8, на которой закреплена губка 9. А на оси с шестерней 5 закреплена дополнительная шестерня
20 10, взаимодействующая , с односторонней рейкой 11, на которой закреплена губка 12, Рейка 3 взаимодействует с шестернями 13 и 14, На одной оси 15 с шестерней 13 закреплена допол25нительная шестерня 16, взагалодействующая с односторонней рейкой 17, на которой закреплена губка 18, На оси шестерни 14 закреплена дополнительная шестерня 19, взаимодействую30 щая с односторонней рейкой 20, на
.которой закреплена губка 21. Рейки 2 и 3 шарнирно соединены с планкой 22, середина которой шарнирно соединена тягой 23 с приводом (на фигурах не показан).
Схват работает следующим образом.
При движении тяги 23 вниз перемещаются и рейки 2 и 3, Рейка 2 вращает шестерни 4 и 5. и соответственно |шестерни 7 и 10, при взаимодействий шестерни 7 с рейкой 8 и шестерни 10 с рейкой 11 губки 9 и 12 расходятся. Рейка 3 вращает шестерни 13 и 14 и соответственно шестерни 16 и 19. Шестерня 16 взаимодействует с рейкой 17, а шестерни 19 - с рейкой 20, при этом губки 18 и 21 расходятся.
При перемещении тяги 23 вверх перемещение губок происходит в обратном направленииj осуществляется зажим детали. В случае эахва.та ступенчатой детали губки сначала контактируют с большим диаметром детали, после зажима этой ступени перемещение губок прекращается, а так как планка 22 шарнирно соединена с рейками 2 и 3, то при окончании перемещения Одной рейки другая продолжает перемещаться до соприкосновения со второй ступенью детали меньшего диаметра.
Предлагаемый схват позволяет увеличивать диапазон захватываемых
деталей, при этом с изменением диаметров деталей исключается смещение
их оси в плоскости симметрии губок.
Формула изобретения
с целью расширения технологических возЛожностей, кинематическая цепь связи губок с приводом выполнена в виде планки н двух зубчато-реечных механизмов, имеющих каждый двустороннюю рейку, причем рейки указанных механизмов расположены параллельно друг другу и шарнирно связаны между собой и с приводом посредством указанной планки, а шестерни этих механизмов связаны с губками.
Источники информации, 30 принятые во внимание при экспертизе
А-А
JHL
Ф&г.4
