(S4) ТЕЛЕСКОПИЧЕСКИЙ ЗАХВАТ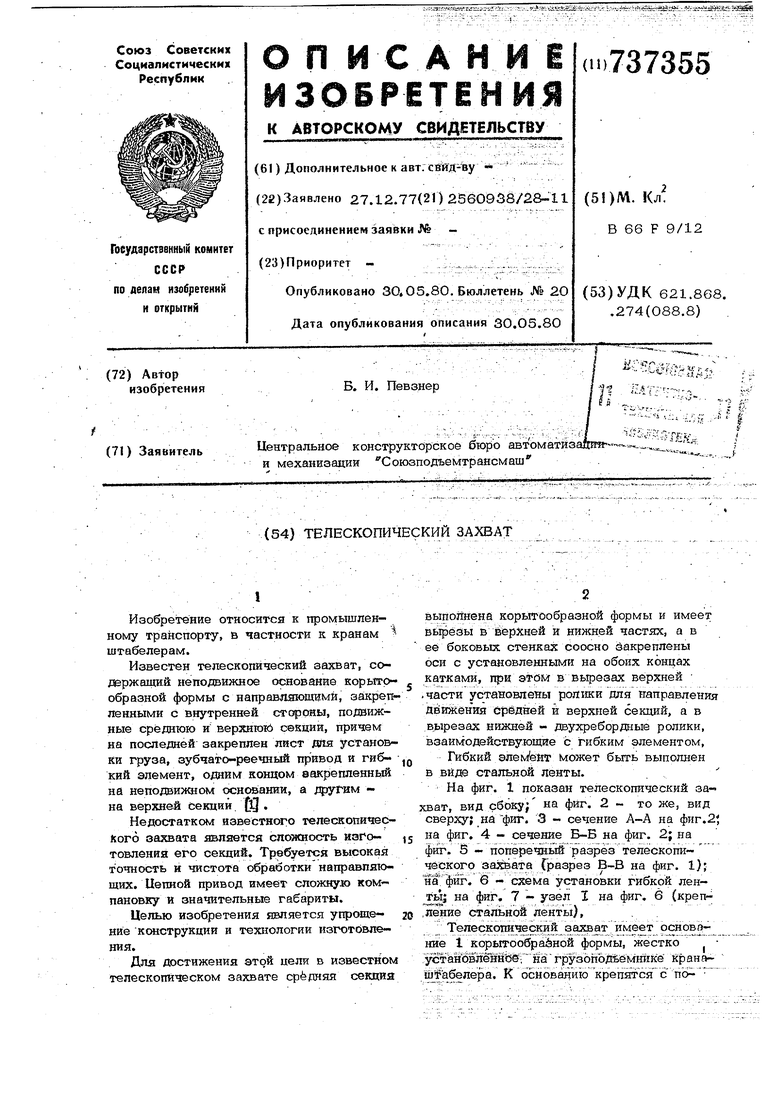
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический захват | 1980 |
|
SU908745A1 |
| Телескопический захват | 1986 |
|
SU1463646A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1983 |
|
SU1181953A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Кран-штабелер | 1982 |
|
SU1055696A1 |
| Захват к крану-штабелеру | 1980 |
|
SU992418A1 |
| КОМПЛЕКТОВОЧНЫЙ КРАН —ШТАБЕЛЕР | 1974 |
|
SU380105A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1024393A1 |
| Транспортно-накопительная система | 1988 |
|
SU1682255A1 |
| Захват крана-штабелера | 1980 |
|
SU903292A1 |
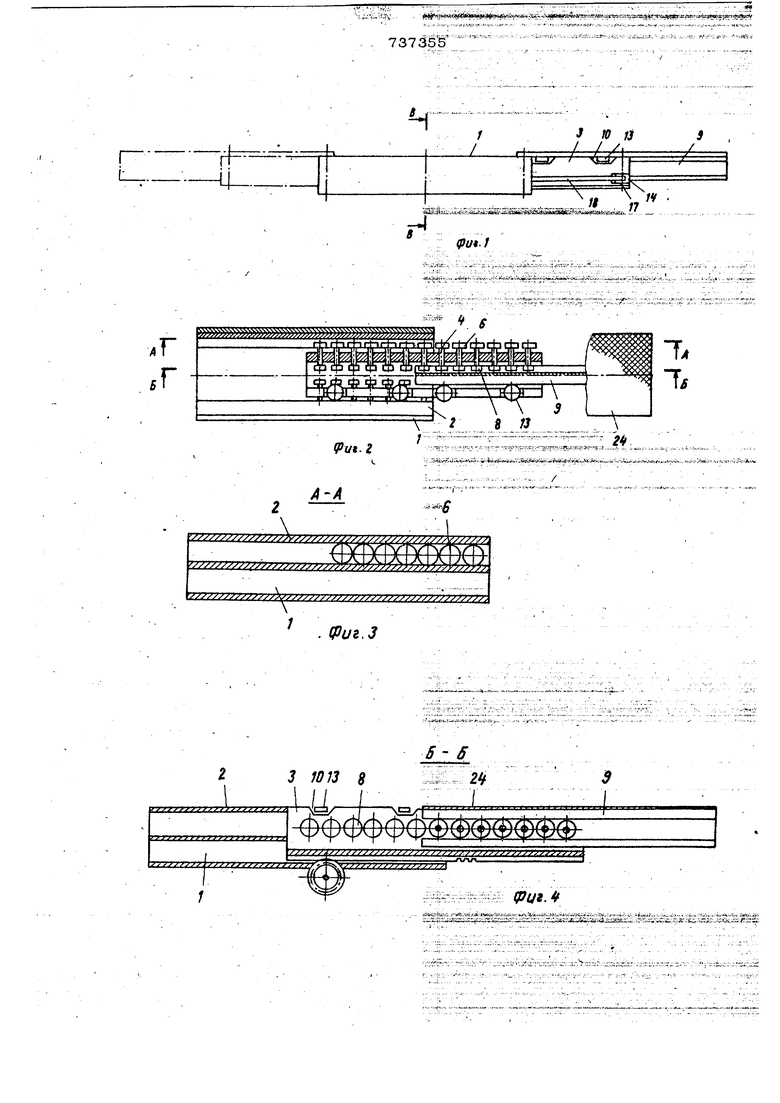
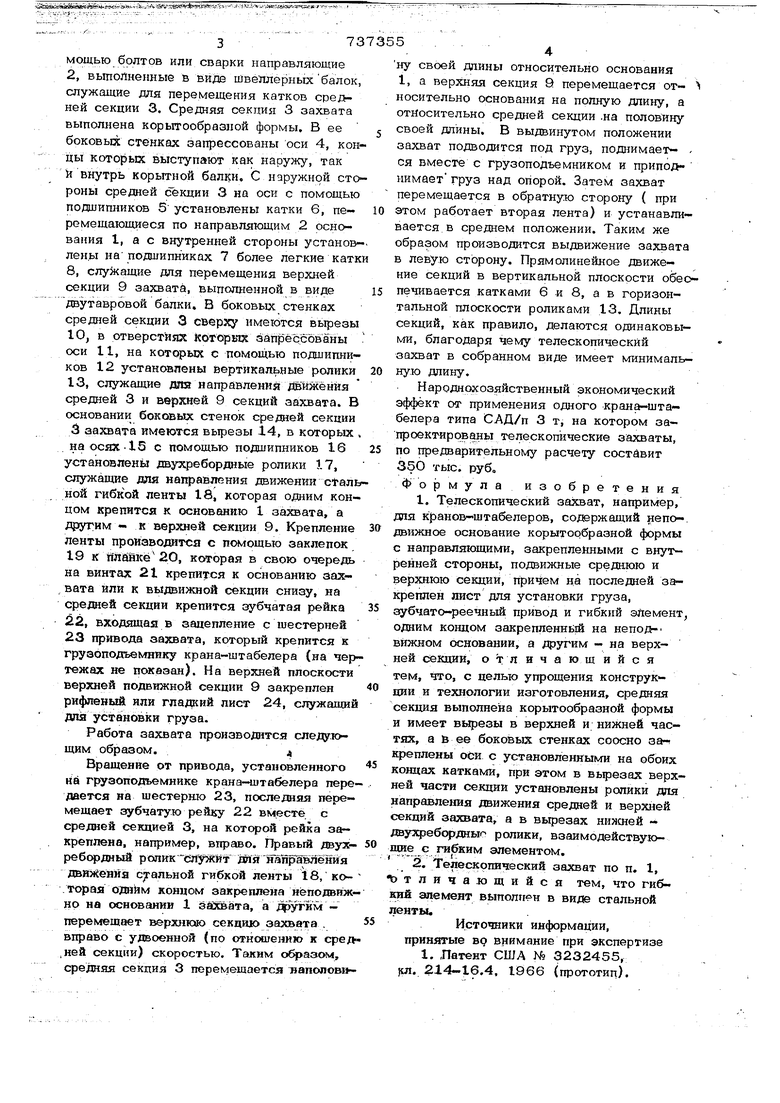
Изобретение относится к промышленному транспорту, в частности к кранам штабелерам. Известен телескопический захват, содержащий неподвижное основание корыто образной формы с направляющими, закреп ленными с внутренней стороны, подвижные среднюю и верхнютб секции, причем на последней закреплен лист для установки груза, зубчато-реечный привод и гибкий элемент, одним концом аакрепленньй на неподви 1шом основании, а другим на верхней секции Ш. Недостатком известного телескопического захвата является спожность изготовления его секций. Требуется высокая точность и чистота обработки направляющих. Цепной привод имеет сложную компановку и значительньте габариты. Целью изобретения является упрощение конструкции и технологии изготовления. Для достижения этой цели в известном телескопическом захвате средняя секция выполнена корытообразной формы и имеет вьхрёзы в Ёерхней и нижней частях, а в её боковых стенках соосно Закреплены оси с устадовленными на обоих концах катками, при этом в вырезах верхней части установлены ролики для направления Движения средней и верхней секций, а в в 1ревах нижней - двухребордные ролики, взаимодействующие с гибким элементом, Гибкий алемейт Может быть выполнен в виде стальной ленты. На фиг. 1 показан телескопический зават, вид сбоку; на фиг. 2 то же, вид сверху; на фиг. 3 - сечение А-А на фиг.2t на фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - поперечный разрезтелбскопи- ческого Гразрез В-В на фиг. 1); . 6 - схема установки гибкой ленты; на фиг. 7 - узел I на фиг. 6 (креп,ление стальной ленты), Телескопический захрат имеет основ ание i корытообразной формы, жестко ; тановлёнвЬёгГ нагрузоподъёмнике к: ранаш абелера. К основанию крепятся с ni мощью болтов или сварки направляющие 2, выполненные в виде швеллерныхбалок, служащие для перемещения катков средней секции 3. Средняя секция 3 захвата выполнена корытообразной формы, В ее боковых стенках запрессованы оси 4, концы KOTOfJbix выступают как наружу, так И внутрь корытной балки. С наружной стороны средней секции 3 на оси с помощью подшипников 5 установлены катки б, перемещающиеся по направляющим 2 основания 1, а с внутренней стороны установлены на подшипниках 7 более легкие катк 8, слугкащие для перемещения верхней секции 9 захвата, выполненной в виде двутавровой балки. В боковых стенках средней секции 3 сверху имеются вырезы 10, в отверстиях Которых аап|5ёссбваны оси 11, на которых с помощью подшипников 12 установлены вертикальные ролики 13, служащие для направления движения средней 3 и верхней 9 секций захвата. В основании стенок средаей секции 3 захвата имеются вьфезы 14, в которых на осях15 с помощью подшипников 16 установлены двухребордные ролики 1.7, служащие для направления движении стал ной гибкой ленты 18, которая одним концом крепится к основанию I захвата, а другим - к верхней секции 9. Крепление ленты производится с помощью заклепок 19 к Нййнкё 20, которая в свою очередь на винтах 21 крепится к основанию захвата или к выдвижной секции снизу, на средней секции крепится зубчатая рейка 22, входящая в зацепление с шестерней 23 привода захвата, который крепится к грузоподъемнику крана-штабелера (на чер тежах не показан). На верхней плоскости верхней подвижной секции 9 закреплен рифленый или гладкий лист 24, служащий дпза установки груза. Работа захвата производится следующим образом.л Вращение от привода, установленного на грузоподъемнике крана-штабелера пере дается на шестерню 23, последняя перемещает бчатую рейку 22 вместе с сре/шей секцией 3, на рейка закреплена, например, вправо. Правоьгй двухреб(чэдный ролик служит дай Fanpa двиткення с-гальной гибкой ленты 18, которая oTwiJM концом закреплена неподвиж но на основании 1 захвата, а Другим перемещает верхикво секцию захвата . вправо с удвоенной (по отношению к сред ,ней секции) скоростью. Таким , средняя секция 3 перемешается напоповн737355ну своей длины относительно основания 1, а верхняя секция 9 перемещается от- носительно основания на полную длину, а относительно средней секции .на половину своей длины. В выдвинутом положении захват подводится под груз, поднимает- ся вместе с грузоподъемником и приподнимает груз над опорой. Затем захват перемещается в обратную сторону ( при этом работает вторая лента) и устанавливается в среднем положении. Таким же образом производится выдвижение захвата в левую сторону. Прямолинейное движение секций в вертикальной плоскости обеопечивается катками 6 и 8, а в горизонтальной плоскости роликами 13, Длины секций, как правило, делаются одинаковыми, благодаря чему телескопический захват в собранном виде имеет минимальную длину. Народнохозяйственный экономический эффект от применения одного крана-штабелера типа САД/п 3 т, на котором запроектированы телескопические захваты, по предварительному расчету составит 35О тыс. руб. Формула изобретения 1. Телескопический захват, например, дня кранов-штабелеров, содержащий непо-. движное основание корытообразной формы с направляющими, закрепленными с внутренней стороны, подвижные среднюю и верхнюю секции, причем на последней закреплен лист для установки груза, зубчато-реечный привод и гибкий элемент, одним концом закрепленнйй на неподвйжном основании, а другим - на верхней сйкции, отличающийся тем, что, с целью упрощения конструкции и технологии изготовления, средняя секция выполнена корытообразной формы и имеет вырезы в верхней и нижней частях, а В ее боковых стенках соосно закреплены о&и с установленными на обоих концах катками, при этом в вырезах верхней части секции установлены ролики для направления движения средней и верхней секций захвата, а в вьфезах ниясней двузфебордныо ролики, взаимодействующ„е с гибким элементом. 2. Телескопический захват по п. 1, Ьтпичающийся тем, что гибкий элемент выполгг н в виде стальной ленты. Источники информации, принятые BQ внимание при экспертизе 1. Латент США № 3232455, )Ш. 214-16.4, 1966 (прототип).
7373В5
. , ;7
ii .iijftS- i I-iil- ife-iii Si SS.
н
ptf«. /
4 Г
«Г
. Фиг.З
3 1013 8
5- S
24
