(54) РОТОРНО-КОНВЕЙЕРНАЯ МАШИНА ДЛЯ СОРТИРОВКИ
ИЗДЕЛИЙ


| название | год | авторы | номер документа |
|---|---|---|---|
| Контрольно-сортировочное устройство | 1988 |
|
SU1542640A1 |
| Устройство управления подвижными элементами | 1982 |
|
SU1148759A1 |
| Роторно-конвейерная машина для сортировки изделий | 1988 |
|
SU1632523A1 |
| Роторно-конвейерная машина | 1986 |
|
SU1650273A1 |
| Контрольно-сортировочное устройство | 1979 |
|
SU848099A1 |
| Устройство для сортировки деталей по линейным размерам | 1973 |
|
SU456645A1 |
| Сборочная роторно-конвейерная линия | 1982 |
|
SU1318744A1 |
| Устройство для контроля и сортировки изделий | 1981 |
|
SU988375A1 |
| Роторно-конвейерная машина | 1978 |
|
SU831627A1 |
| Роторно-конвейерная линия | 1983 |
|
SU1135608A1 |


Изобретение относится к контрольно-сортировочной технике, а именно к роторпо-конвейерным машинам для сортировки изделий, размеры которых контролируются механическими средствами. Такие машины состоят но ротора с размещенными по его периферии измерительными станциями и носителями изделий, или обогнутого конвейера с носителями изделий.
Известны роторно-конвейерные машины 1, в измерительных станциях которых средства контроля совмещены со средствами сортировки; при этом каждое средство контроля также выполнено в виде возвратно-поступательно перемещаемого измерительного штока, а совмещенное с ним средство сортировки - в виде рычажного механизма. Измерительный щток имеет подвижный вдоль него щуп измерительной базы, благодаря чему разница в положениях измерительных баз не влияет на результаты контроля. Таким образом, подобные роторно-конвейерные машины, имея высокую производительность, обеспечивают достаточную точность контроля и сортировки. Однако они могут сортировать предметы по одному пределу, а именно: выделять в качестве бракованных только такие предметы, у которых контролируемый размер меньше допустимого.
Цель изобретения заключается в расширении технологических возможностей путем возможности сортировать предметы не только по нижнему, но и по верхнему пределу допуска.
Указанная цель достигается тем, что в известной роторно-конвейерной машине, содержащей ротор с носителями сортируемых изделий и размещенные равномерно по его периферии измерительные станции, каждая из которых имеет установленный с возможностью возвратно-поступательного перемещения измерительный щуп, соосный измерительному щтоку, механизм сортировки и чаг для контроля положения измерительного штока, установленный на измерительном щупе, механизм сортировки выполнен в виде установленной на измерительном щтоке подпружиненной обоймы со смонтированным на ней подпружиненным рычажным захва20 том.
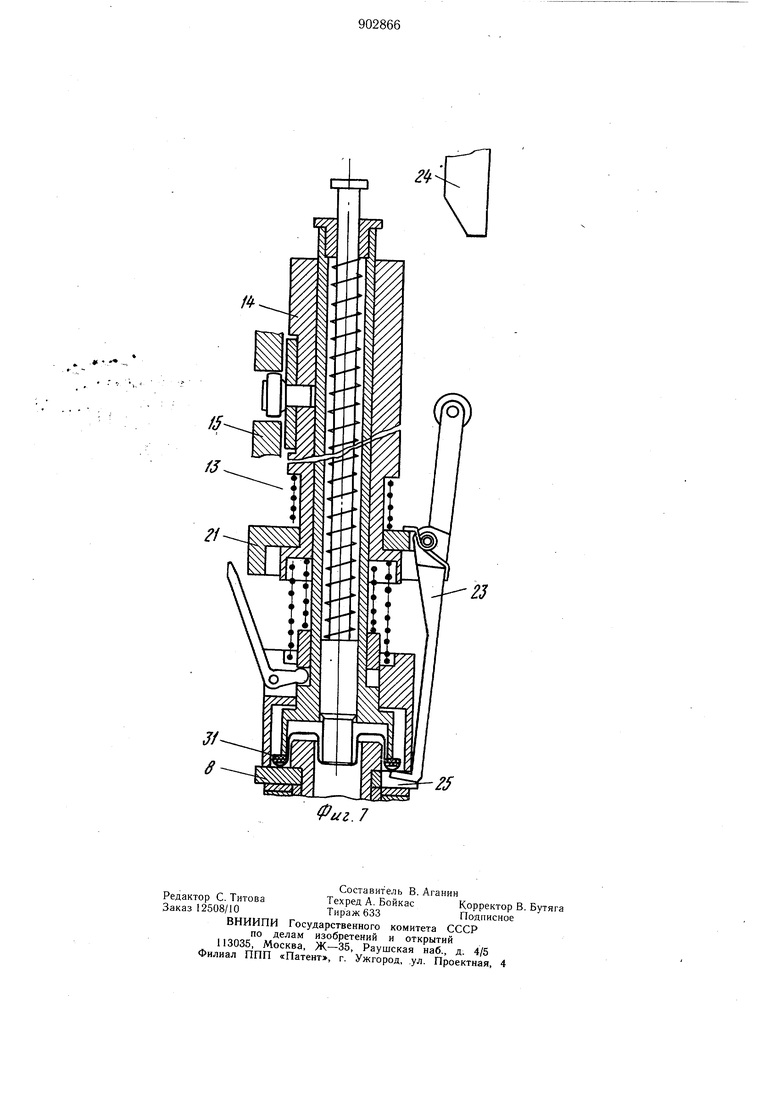
На фиг. 1 изображена роторно-конвейерная машина, вид в плане; на фиг. 2 - конвейер машины, продольный разрез; на фиг. 3 - то же, вид в плане; на фиг. 4 - то же, разрез А-А на фиг. 1; на фиг. 5 - измерительная станция, при контроле годного корпуса; на фиг. 6 - то же, при контроле корпуса без прокладки; на фиг. 7 - то же, при контроле корпуса с двумя прокладками. Роторно-конвейерная машина для сортировки корпусов клапанов аэрозольных упаковок представляет собой совокупность роторов питания 1, контроля и сортировки 2 и выдачи годных изделий 3, обогнутых цепным конвейером 4, снабженным носителями 5 сортируемых корпусов 6. Каждьш носитель 5 состоит из втулки 7 и верхней пластины 8 наружного звена цепнего конвейера 4; при это.м каждая пласти|,а 8 служит измерительной базой сортируемых корпусов 6. . Ротор 2 контроля и сортировки представляет собой вращаемое основание 9, установленное в подшипниковых опорах 10 и 11 на колоне 12. По периферии вращаемого основання 9 размещены измерительные станции 13. Каждая станция 13 смонт1;1рована в толкателе 14, кулачкового механизма, пространственный кулачок 15 которого закреплен в верхней части колоны 12. В каждом толкателе 14 размещен возвратно-поступательно перемещаемый вместе с ним измерительный шток 16 со ступенью 17. На кажлый измерительный шток 16 надет подвижный вдоль него щуп 18 измерительной базы, который оснащен средством контроля положения измерительного штока 16; это средство выполнено в виде двуплечего рычага 19, одно плечо 20 которого взаимодействует со ступенью 17 измерительного штока 16. Каждая измерительная станция 13 имеет также средство для сортировки, которое выполнено в виде обоймы 21, контактирующей со вторым плечом 22 рычага 19. Обойма 21 оснащена рычажным захватом 23 бракованных корпусов 6. Рычажные захваты 23 управляются кулачками 24, присоединенными к верхней части вращаемого основания 9. Дли прохода рычажных захватов 23 под бракованные корпусы 6 в каждой пластине 8 конвейера 4 предусмотрены два паза 25. К нижней части вращаемого основания 9 прикреплено приводноезубчатое колесо 26, а выше него - к фланцу 27 звездочка 28, обогнутая цепным конвейером 4. Сборник 29 служит для приема бракованных корпусов 6. По периферии ротора 3 годных изделий разм.-:щены управляемые захваты. Сборник ГО служит для приема годных корпусов 6. Годные корпуса 6 имеют одну прокладку 31, бракованные либо не имеют прокладок, либо имеют две прокладки. Роторно-конвейерная машина для контроля и сортировки работает следующим образом. Сортируемые корпуса 6 поступают из бункера ротора 1 в носители 5 конвейера Л, который транспортирует их к ротору 2 контроля и сортировки. Под действием кулачка 15 толкатели 14 с измерительными станциями 13 постепенно опускаются на сортируемые корпуса 6. При этом, щуп 18 каждой измерительный станции 13 упирается в соответствующую пластину 8 конвейера 4, которая является измерительной базой. Затем, при дальнейшем опускании толкателя 14 измерительный щток 16 упирается в сортируемый рычаг 19 и занимает в зависимости от качества сортируемого корпуса 6 (с одной прокладкой, без прокладки или с двумя прокладками) одно из трех положений. которые показаны соответственно на фиг. 5, 6 и 7. Между тем толкатель 14 продолжает опускаться, а вместе с ним - обойма 21 вместе с рычажным захватом 23. В первом случае, если корпус 6 годен, т. е. имеет прокладку 31, то плечо 22 рычага 19 становится на пути обоймы 21 и останавливает ее, вместе с обой.мой 21 останавливается рычажный захват 23 в положении, когда его нижнее плечо опирается на боковую поверхность щупа 18. Если же корпус 6 бракованный, т. е. не имеет прокладки 31 или имеет две прокладки 31, то плечо 22.рычага 19 занимает такое положение, которое позволяет обойме 21 продолжать опускаться, благодаря чему нижнее плечо захвата 23 минует боковую поверхность щупа 18, входит в соответствующий паз 25 пластины 8 под бракованный корпус 6. Затем толкатели 14 с измерительными станциями 13 начинают подниматься, причем годные корпуса 6 остаются в носителях 5 и транспортируются конвейером 4 к ротору 3. Бракованные корпуса 6 при подъеме толкателей 14 извлекаются захватами 23 из носителей 5 конвейера 4 и удерживаются до тех пор, пока не вступают во взаимодействие с кулачками 24. Это происходит в той зоне ротора, где измерительные станции 13 находятся над сборником 29. В этом месте захваты освобождают бракованные корпуса 6, которые попадают в сборник 29. Годные корпуса 6 на дуге огибания конвейером 4 ротора 3 извлекаются его захватами из носителей 5 и затем выдаются в сборник 30 годных изделий, Таким образом, изобретение позволяет с высокой точностью и производительностью сортировать изделия по комплектности или линейным размером по двум пределам поля допуска. Формула изобретения Ротбрно-конвейерная мащина для сортировки изделии, содержащая ротор с носителями сортируемых изделий и размещенные равномерно по его периферии измерительные станции, каждая из которых имеет установленный с возможностью возвратно-поступательного перемещения измерительный ступенчатыи шток, подпружиненный измерительный щуп, соосный измерительному штоку, рычаг для контроля положения измерительного штока, установленный на измерительном щупе, и механизм сортировки, отличающаяся тем, что, с целью расширения технологических возможностей, механизм сортировки выполнен в виде установленной
i:«li)))(«l
на измерительном штоке подпружиненной обоймы со смонтированным на ней подпружиненным рычажным захватом.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 456645, кл. В 07 С 5/04, 1973 (прототип) .
fPuz.3 Фиг. 5 Фиг. 6
