4 30
:л
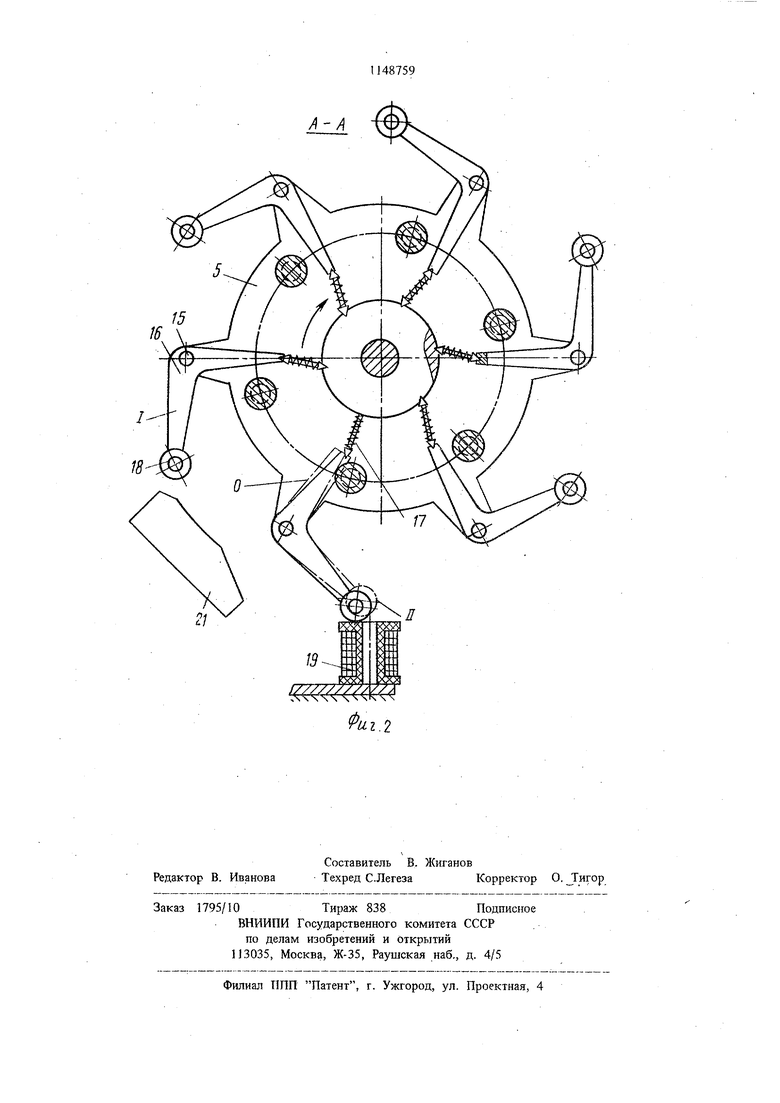
х Изобретение относится к устройствам для управления надвижными элеменгами, например ползунами, в роторах роторных н роторно -конвейерных машин, в частности для нериодического фиксирования или, наоборот, для освобождения от фиксации этих элементов и может быть иснользовано в контрольных роторах для сортировки, в роторах иеретчи изделий, в загрузочных роторах и т.п. Известно устройство для управления ползунами ротора, содержащее размещоптые в каждой позиции ротора подпружиненные двупле ще рычаги, каждый из которых установлен с возможностью воздействия одним плечом на ползун. Рычаги периодически приводятся в действие неподвижно установленным пусковым якорным электромагнитом через промежуточн.тй рычажно-кулачковый механизм 11 Однако известное устройство сложно по конструкции и обладает ограниченным быстродействием. Цикл работы электромагнита в этом устройстве, делящийся в промежутке между контактами якоря с двумя смежными позициями ротора, состоит из двух периодов: притягивания якоря (или, наоборот, выталкивания) и затем возвращения его в исходное состояние. Для соверщения этих действий требуется определенное время, так как якорный электромаг1П1т обладает определенной инерционностью. При производительности машины i до 400 шт/мин такое устройство вполне работоспособно. При дальнейшем увеличении производительности, естественно, yвeл rчивacтcя скорость вращения ротора, время между контактами электромагнита с двумя смежнЬ1ми позициями ротора сокращается настолько, что электромагнит, сработавщий в одной позиции, не успеет вернуться в исходное состояние к моменту контакта со следующей позицией ротора. Вследствие этого известное устройство невозможно, использовать в машинах с высокой производительностью (800-1200 шт/мин). Цель изобретения - повышение быстродействия и упрощение конструкции устройства для управления подвижными элементами рото ров. Поставленная цель достигается тем, что в устройстве управления подвижными элементами, содержащем размешенные в каждой позиции установленного на станине ротора, подвижные двуплечие рычаги, управляемый элемент и электромагнит, включенный в це1п управления через синхронизатор, первое плечо двуплечих рычагов снабжено защелкой с пру жиной, а второе является управляемь1м элементом и взаимодействует с электромагнитом, 1тричем электромагнит вт1полнен в виде импульсного соленоида, якорем которого служит второе плечо рычага, и установлен на станине последовательно с кулачком, контактирующим с вторым плечом рычага. Таким образом, в предлагаемом устройстве за счет того, что из цикла работы электромагнита исключе1го время на возврат якоря электромагнита, сокращено время срабатывания и возврата в исходное состояние самого электромагнита. На фиг. 1 показан ротор сортировки, продольный разрез; на фш. 2 - разрез А-А на фиг. 1. Ротор сортировки представляет собой закрепленный на станине 1 вал 2, на который насажетгы приводное зубчатое колесо 3, барабан 4, диск 5 и звездочка 6, обогнутая конвейером 7 с носителями 8 заготовок 9. В барабане 4 равномерно по окружности установлены ползуны 10 со ступенчатыми штоками 11. Каждый ползун 10 сочле1ген со штоком 11 Sepea пружину 12. По периферии барабана 4 имеется пазовый кулачок 13, а ползуны 10 снабжены роликами 14, размещенными в пазу кулачка 13. На диске 5 установлены с возможностью качания на осях 15 двуплечие рычаги 16. Одно плечо каждого рычага 16 оснащено пружиной 17, а другое роликом 1 В. Пружина 17 установлена враспор так, что рычаг 16 может занимать только два устойчивых положения (I и II на фиг. 2). Для управления рьмагами 16 на станине 1 жестко укреплены соленоид 19, включенный : в цепь через синхронизатор 20, и кулачок 21, Для сбора сортируемых заготовок 9 ротор снабжен сборниками 22 (для годных заготовок) и 23 (для брака). Ротор работает следующим образом. Нормальное положение рычагов 16 (положение 1), когда шток 11 свободен. Если в ротор поступает годная заготовка 9, то ползун 10 под действием кулачка 13 опускается в точке расположения сборника 22 и imOKOM 11 выталкивает эту заготовку из носителя 8 в сборник 22. Если заготовка 9 бракованная, то на соленоид 19 поступает сигнал с контрольного устройства (не показано) в виде электрического импульса, мощность которого достаточна, чтобы преодолеть сопротивление пружины 17. Соленоид 19 притягивает движущийся мимо него рычаг 16, который под действием этого притяжения выхо.цит из устойчивого положения I и проходит критическую точку 0. Далее под действием .самой пружины 17 рычаг 16 занимает второе устойчивое положение 71. При этом шток 11 своей ступенью упирается в рычаг 16, и хотя ползун 10 опускается под деиствием кулачка 13, шток 1 остается на месте, и заготовка 9 в се5орник 22 годных заготовок не выдается. Затем по ходу вращения ротора рычаг 16 роликом 18 наезжает на .неподвижный кулачок 21, возвращается в положение 1 щток 11 освобождается, гюлзутт 10 под действием кулачка 13 опускается и щтоком 11 выталкивает заготовку 9 в сборник 23 брака. При этом синхронизатор 20 обеспечивает поступление импульса на соленоид 19 име1шо в г тот момент, когда плечо рычага 16 оказывается на минимальном от соленоида 19 расстоянии. Время срабатывания соленоида 19 (время притигивания якоря рычага 16 люс время возврата
1
J.
j-p:
0U2 S9Л соленои;1Я в исходное сосгояннс) мс. мя срабатывания электромагнита аналогичной мощности, применяемого в настоянюе время в тпких устройствах и выпycкae foro в соот ветствии с отраслевой нормалью, марки ЭМ-0102 без рычажной системы составляет 60 мс вместе с рычачсной системой около 200 мс. Таким образом, в предлагаемом уст1юйстве новынтено быстродействие управления подвижными элементами роторов примерно в 8 раз. Это позволило решить ряд конструктивнътх задач при создании высокопроизводительных (1200 Н1Т/МИК и выше) роторно-конвейерных машин.
Ж
иг.2

| название | год | авторы | номер документа |
|---|---|---|---|
| Контрольно-сортировочное устройство | 1978 |
|
SU766674A1 |
| Контрольно-сортировочное устройство | 1979 |
|
SU848099A1 |
| Роторно-конвейерная машина для контроля изделий | 1982 |
|
SU1551436A1 |
| Роторный автомат питания | 1979 |
|
SU872191A1 |
| Роторный автомат питания | 1987 |
|
SU1562102A1 |
| Роторная машина | 1981 |
|
SU1038040A1 |
| Роторно-конвейерная машина | 1980 |
|
SU940993A1 |
| Роторный автомат | 1988 |
|
SU1593914A1 |
| Роторно-конвейерная машина | 1986 |
|
SU1650273A1 |
| Устройство для автоматической смены инструмента | 1981 |
|
SU996166A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ ПОДВИЖНЫМИ ЭЛЕМЕНТАМИ, содержащее размещенные в каждой позиции установленного 12|fcS .. на станине ротора подвижные двуплечие , управляемый элемент и электромагнит, включенный в цепь управления через синхротшзатор, отличающееся тем, что, с повыщения быстродействия и упрощения конструкции, первое плечо двуплечих рычагов снабжено защелкой с пружиной, а второе является управляемым элементом, причем электромагнит выполнен в виде импульсного соленоида и установлен на станине последовательно с кулачком, контактирующим с вторым плечом рычага.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Контрольно-сортировочное устройство | 1979 |
|
SU848099A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
