(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор с ручным управлением | 1983 |
|
SU1129067A1 |
| Манипулятор | 1974 |
|
SU602366A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| Манипулятор | 1976 |
|
SU766852A1 |
| Манипулятор | 1975 |
|
SU656826A2 |
| Манипулятор | 1975 |
|
SU743861A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Копирующий манипулятор | 1978 |
|
SU722754A1 |
| Механическая рука | 1983 |
|
SU1090545A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
1
Изобретение относится к машиностроению, а именно к копирующим манипуляторам, и может найти применение для механизации ручных, вспомогательных, монтажных и погрузочно-разгрузочных работ, требующих высокой точности управления.
Известен манипулятор, содержащий исполнительный механизм, выполненный в виде пантографа с одним ведомым щарниром, задающий механизм, установленный на ведомом шарнире пантографа испол- ю нительного механизма, и сервоприводы с датчиком 1.
Недостатком известного манипулятора является то, что после отработки задающего воздействия исполнительным механиз- 5 мом положение задающего механизма не фиксируется, вследствие чего возможно некоторое рассогласование механизма, что может приводить к самопроизвольным перемещениям исполнительного механизма мани- 20 пулятора.
Цель изобретения - повышение точности фиксации положения задающего механизма манипулятора.
Указанная цель достигается тем, что пантограф исполнительного механизма манипулятора снабжен вторьш ведомым щарниром, а задающий механизм выполнен в виде пантографа с одним ведомым шарниром и связан со вторым ведомым шарниром дополнительно введенного упругого элемента.
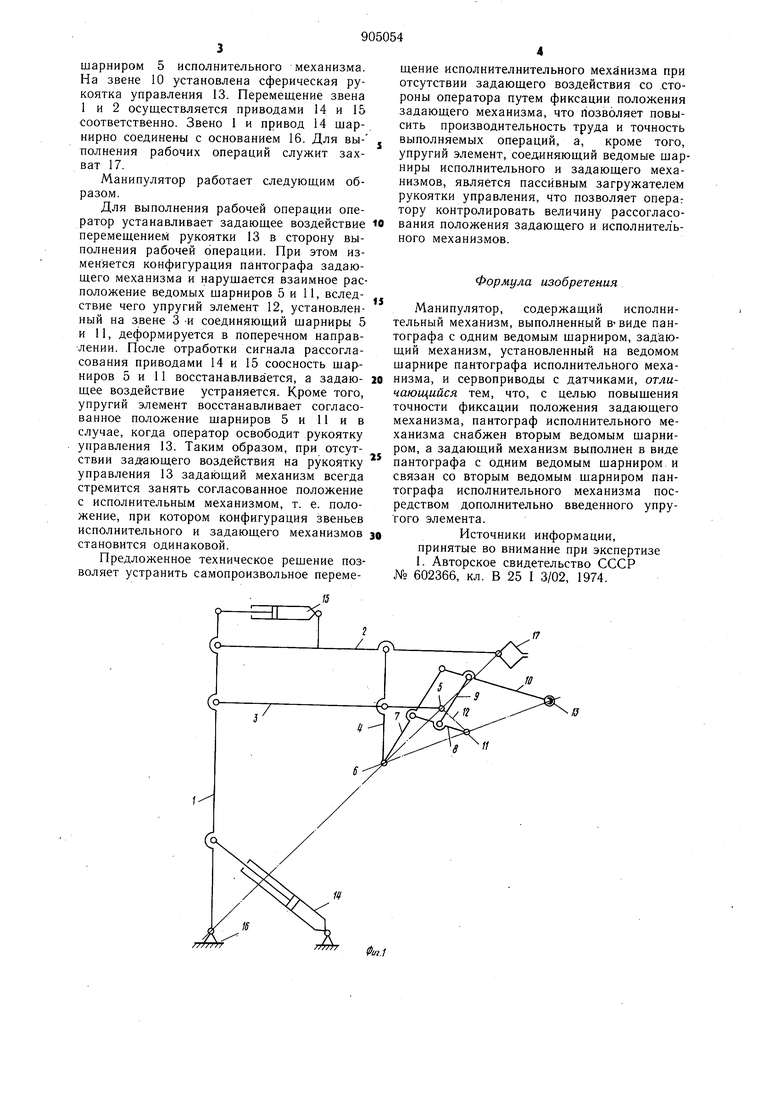
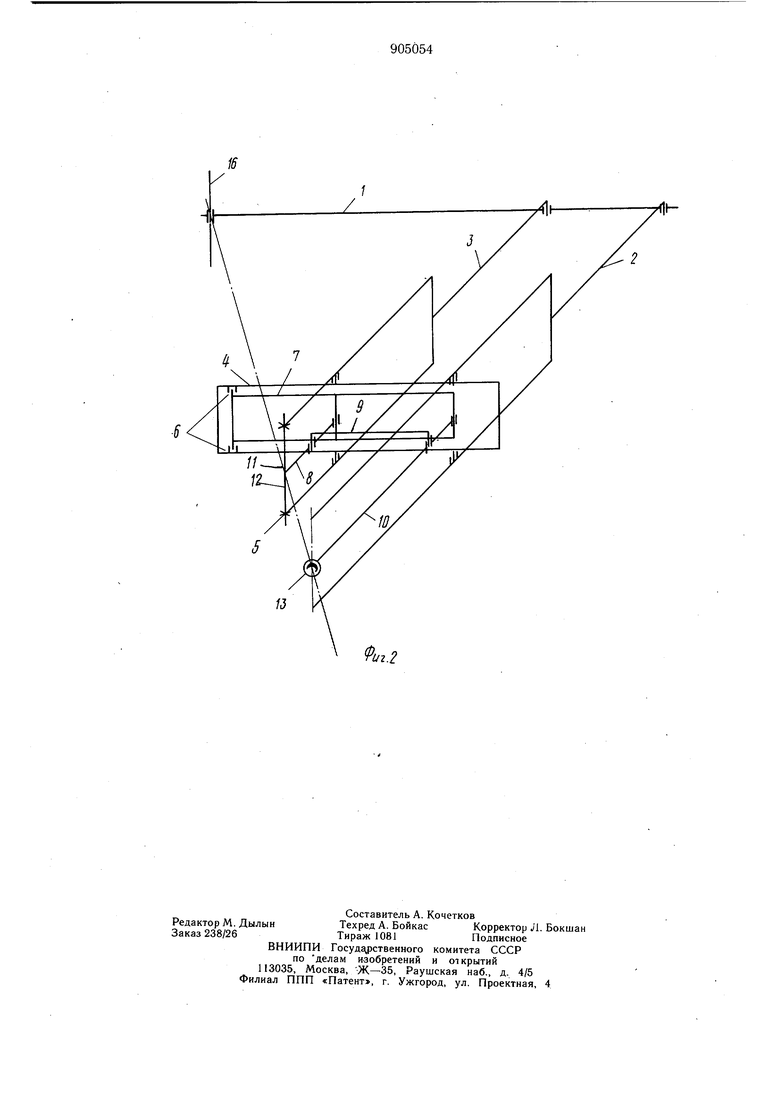
На фиг. 1 изображена кинематическая схема манипулятора при наличии задающего воздействия на задающий механизм; на фиг. 2 - исполнительный и задающий механизмы, аксонометрическая проекция.
Манипулятор состоит из исполнительного механизма, выполненного в виде механизма пантографа, образованного шарнирно сочлененными звеньями 1-4 с двумя ведомыми щарнирами 5 и 6, и задающего механизма, выполненного в виде пантографа, образованного шарнирно сочлененными звеньями 7-10 с одним ведомым щарниром 11. Задающий механизм установлен на ведомом шарнире 6, т. е. звено 7 задающего механизма щарнирно соединено со звеном 4 исполнительного механизма, а ведомый шарнир 11 задающего механизма связан упругим элементом 12 с ведомым шарниром 5 исполнительного механизма. На звене 10 установлена сферическая рукоятка управления 13. Перемещение звена 1 и 2 осуществляется приводами 14 и 15 соответственно. Звено 1 и привод 14 щарнирно соединен-ы с основанием 16. Для выполнения рабочих операций служит захват 17. Манипулятор работает следующим образом. Для выполнения рабочей операции oneратор устанавливает задающее воздействие перемещением рукоятки 13 в сторону выполнения рабочей операции. При этом изменяется конфигурация пантографа задающего механизма и нарушается взаимное расположение ведомых щарниров 5 и И, вследствие чего упругий элемент 12, установленный на звене 3 -и соединяющий шарниры 5 и 11, деформируется в поперечном направлении. После отработки сигнала рассогласования приводами 14 и 15 соосность шарниров 5 и 11 восстанавлива-ется, а задающее воздействие устраняется. Кроме того, упругий элемент восстанавливает согласованное положение шарниров 5 и 11 ив случае, когда оператор освободит рукоятку . управления 13. Таким образом, при отсутствии задающего воздействия на рукоятку управления 13 задающий механизм всегда стремится занять согласованное положение с исполнительным механизмом, т. е. положение, при котором конфигурация звеньев исполнительного и задающего механизмов становится одинаковой. Предложенное техническое решение поз воляет устранить самопроизвольное перемещение исполнителнительного механизма при отсутствии задающего воздействия со стороны оператора путем фиксации положения задающего механизма, что позволяет повысить производительность труда и точность выполняемых операций, а, кроме того, упругий элемент, соединяющий ведомые щарниры исполнительного и задающего механизмов, является пассивным загружателем рукоятки управления, что позволяет опера: тору контролировать величину рассогласо,.,. .- вания положения задающего и исполнительного механизмов, Формула изобретения Манипулятор, содержащий исполнительный механизм, выполненный в-виде пантографа с одним ведомым щарниром, задающий механизм, установленный на ведомом шарнире пантографа исполнительного меха--, .. . низма, и сервоприводы с датчиками, ог.ш чающийся тем, что, с целью повышения Т-СХ- ИЛИ-И- - -.ifi)Аж.--)--I точности фиксации положения задаюшего механизма, пантограф исполнительного механизма снабжен вторым ведомым щарниром, а задающий механизм выполнен в виде пантографа с одним ведомым щарниром и связан со вторым ведомым щарниром пантографа исполнительного механизма посредством дополнительно введенного упругого элемента. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 602366, кл. В 25 I 3/02, 1974.
