(54) УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ ПОДВЕСНОГО КОНВЕЙЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для рагзрузки подвесного конвейера | 1979 |
|
SU829513A1 |
| Манипулятор для погрузки и разгрузки изделий с подвесного конвейера | 1983 |
|
SU1161440A1 |
| Утсановка для окраски изделий | 1975 |
|
SU651854A1 |
| Поргузочно-разгрузочное устройстводля пОдВЕСНОгО КОНВЕйЕРА | 1979 |
|
SU814828A1 |
| Устройство для межоперационного транспортирования детален к станкам | 1941 |
|
SU66996A1 |
| Устройство для передачи изделий с одного конвейера на другой | 1977 |
|
SU719947A1 |
| Устройство для сборки роликов | 1981 |
|
SU1054007A1 |
| Окрасочно-сушильный агрегат | 1987 |
|
SU1520808A1 |
| Устройство для перегрузки изделий | 1977 |
|
SU686953A1 |
| Перегрузочное устройство подвесного конвейера | 1982 |
|
SU1041454A1 |
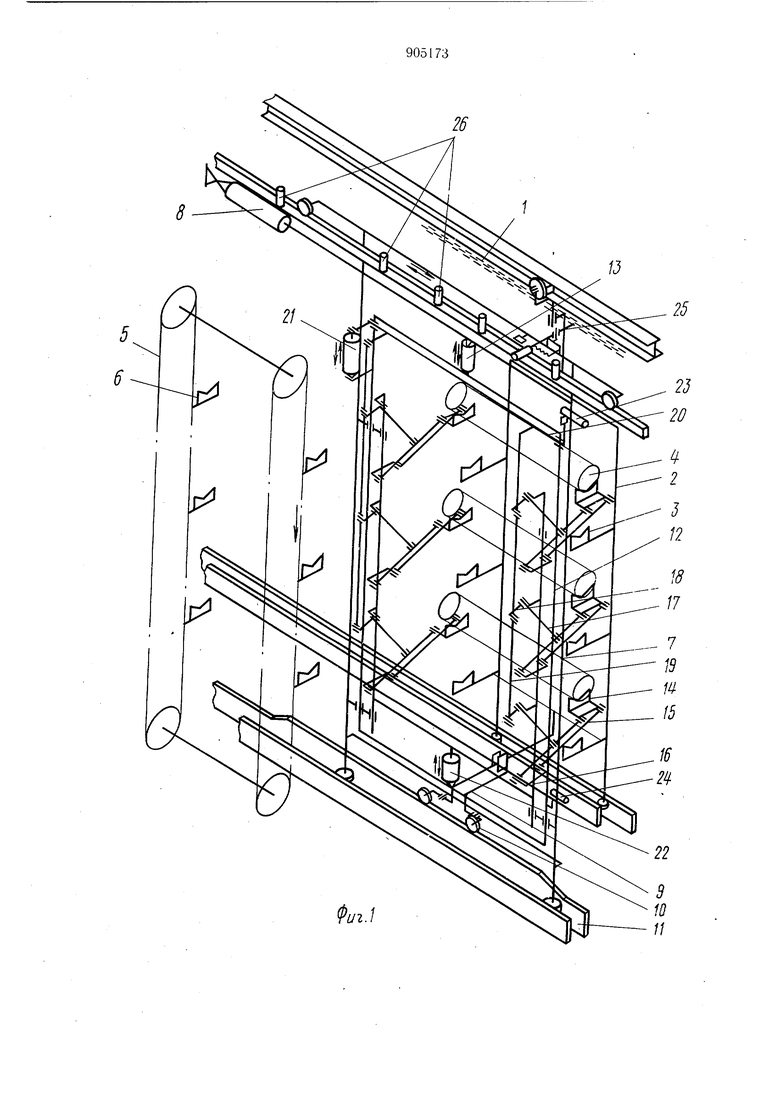
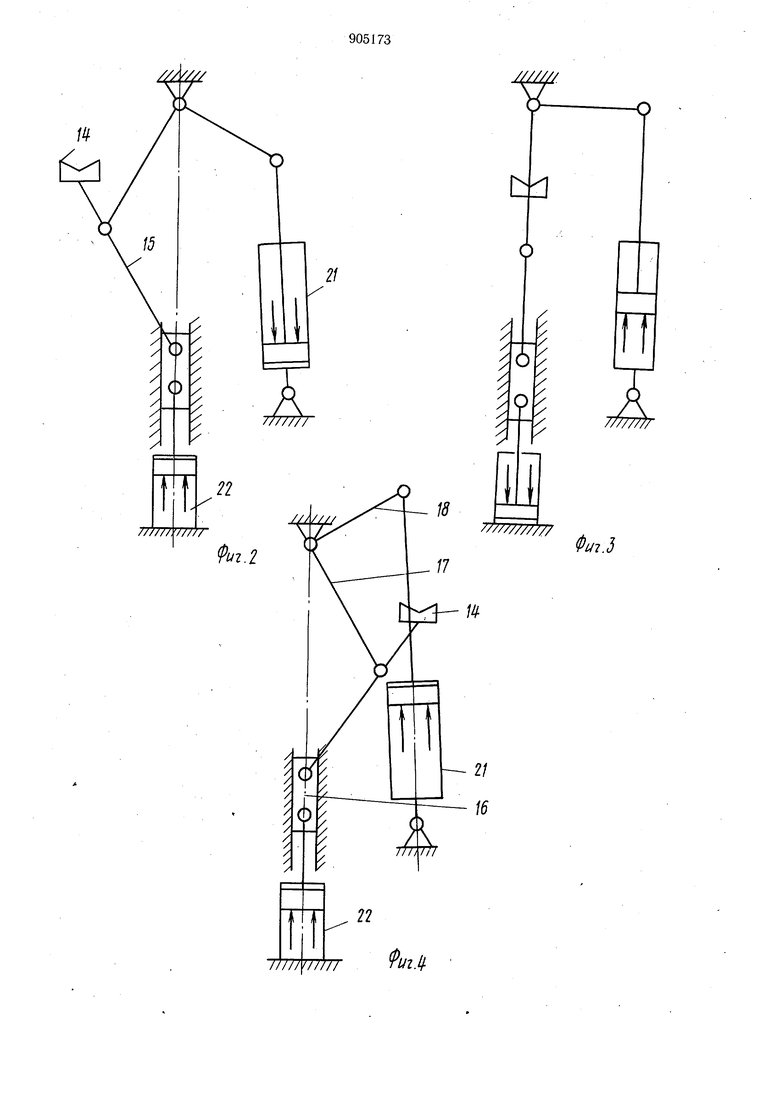
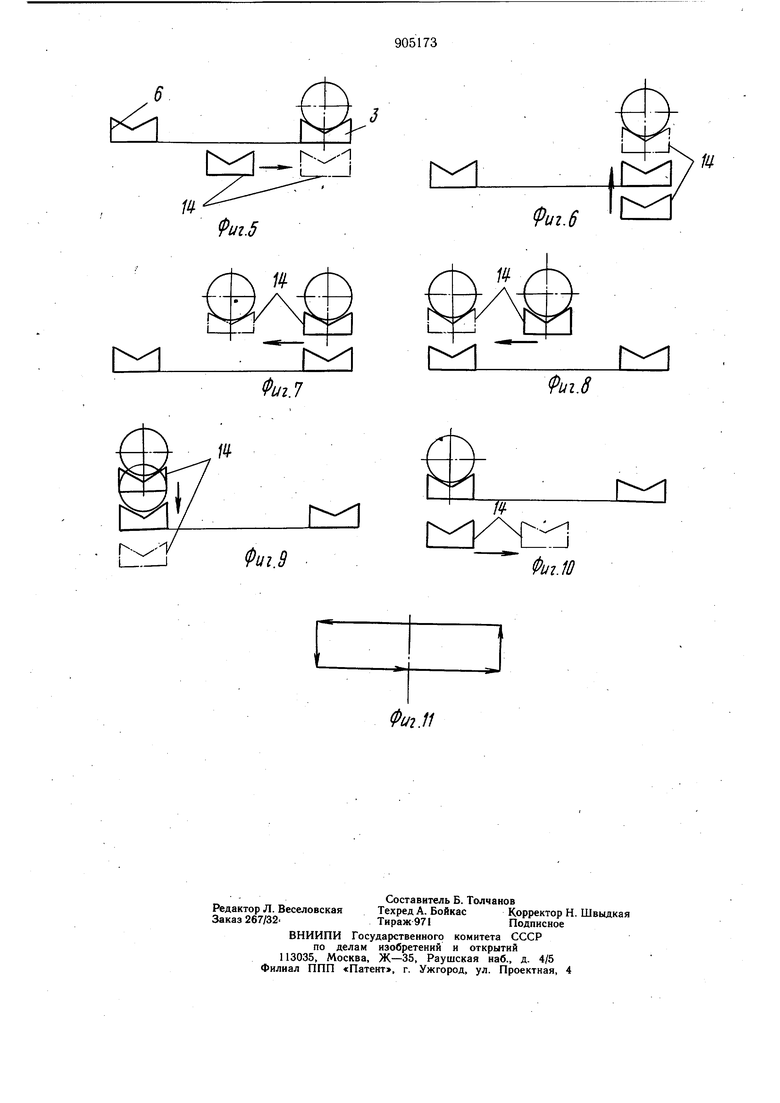
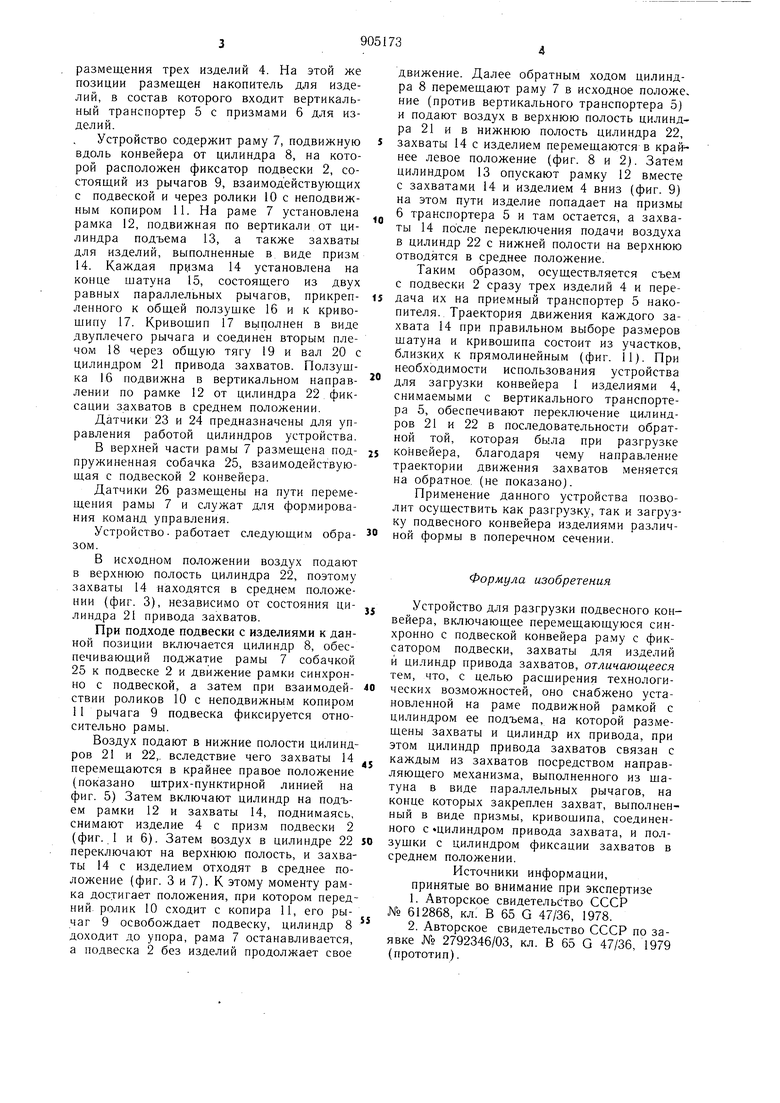
Изобретение относится к устройствам для механизации разгрузки и загрузки подвесных конвейеров. Известно устройство для съема изделий с подвесного конвейера, включающее перемещающуюся синхронно с подвеской конвейера рамку, на которой размещен поворотный от силового цилиндра захват для изделий 1. Недостатком устройства является низкая надежность работы из-за отсутствия фиксации подвески при разгрузке изделий. Наиболее близким к предложенному по технической сущности и достигаемому результату явля,ется устройство для разгрузки подвесного конвейера, включающее пе ремещающуюся синхронно с подвеской конвейера раму с фиксатором подвески, захваты для изделий и цилиндр привода захва тов 2. Однако такое устройство может работать только с круглыми изделиями, так как при снятии, изделий с подвески они перекатываются по захватывающим рычагам, кроме того, данное устройство не может быть применено для загрузки того же конвейера. Целью изобретения является расширение ехнологических возможностей устройства. Поставленная цель достигается тем, что устройство снабжено установленной на раме подвижной рамкой с цилиндром ее подъема, на которой размещены захваты и цилиндр их привода, при этом цилиндр привода захватов связан с каждым из захватов посредством направляющего механизма, выполненного из шатуна в виде параллельных рычагов, на конце которых закреплен захват, выполненный в виде призмы, кривошипа, соединенного с цилиндром привода захвата, и ползушки с цилиндром фиксации захватов в среднем положении. На фиг. 1 приведена кинематическая схема устройства; на фиг. 2, 3 и 4 - кинематическая схема привода захвата при его левом среднем и правом положениях соответственно; на фиг. 5-10 показано изменение положения захвата при разгрузке конвейера; на фиг. 11 - траектория движения захвата. Устройство размещено на позиции разгрузки (загрузки) подвесного конвейера 1, имеющего подвески 2 с призмами 3 для размещения трех изделий 4. На этой же позиции размещен накопитель для изделий, в состав которого входит вертикальный транспортер 5 с призмами 6 для изделий. Устройство содержит раму 7, подвижную вдоль конвейера от цилиндра 8, на которой расположен фиксатор подвески 2, состоящий из рычагов 9, взаимодействующих с подвеской и через ролики 10 с неподвижным копиром 11. На раме 7 установлена рамка 12, подвижная по вертикали от цилиндра подъема 13, а также захваты для изделий, выполненные в, виде призм 14. Каждая пр ;1зма 14 установлена на конце шатуна 15, состоящего из двух равных параллельных рычагов, прикрепленного к общей ползушке 16 и к кривощипу 17. Кривощип 17 вьшолнен в виде двуплечего рычага и соединен вторым плечом 18 через общую тягу 19 и вал 20 с цилиндром 21 привода захватов. Ползущка 16 подвижна в вертикальном направлении по рамке 12 от цилиндра 22, фиксации захватов в среднем положении. Датчики 23 и 24 предназначены для управления работой цилиндров устройства. В верхней части рамы 7 размещена подпружиненная собачка 25, взаимодействующая с подвеской 2 конвейера. Датчики 26 размещены на пути перемещения рамы 7 и служат для формирования команд управления. Устройство, работает следующи1М образом. В исходном положении воздух подают в верхнюю полость цилиндра 22, поэтому захваты 14 находятся в среднем положении (фиг. 3), независимо от состояния цилиндра 21 привода захватов. При подходе подвески с изделиями к данной позиции включается цилиндр 8, обеспечивающий поджатие рамы 7 собачкой 25 к подвеске 2 и движение рамки синхронно с подвеской, а затем при взаимодействии роликов 10 с неподвижным копиром 11 рычага 9 подвеска фиксируется относительно рамы. Воздух подают в нижние полости цилиндров 21 и 22,. вследствие чего захваты 14 перемещаются в крайнее правое положение (показано штрих-пунктирной линией на фиг. 5) Затем включают цилиндр на подъем рамки 12 и захваты 14, поднимаясь, снимают изделие 4 с призм подвески 2 (фиг. 1 и 6). Затем воздух в цилиндре 22 переключают на верхнюю полость, и захваты 14 с изделием отходят в среднее положение (фиг. 3 и 7). К этому моменту рамка достигает положения, при котором перед ний ролик 10 сходит с копира 11, его рычаг 9 освобождает подвеску, цилиндр 8 доходит до упора, рама 7 останавливается, а подвеска 2 без изделий продолжает свое движение. Далее обратным ходом цилиндра 8 перемещают раму 7 в исходное положе, ние (против вертикального транспортера 5) и подают воздух в верхнюю полость цилиндра 21 и в нижнюю полость цилиндра 22, захваты 14 с изделием перемещаются в край нее левое положение (фиг. 8 и 2). Затем цилиндром 13 опускают рамку 12 вместе с захватами 14 и изделием 4 вниз (фиг. 9) на этом пути изделие попадает на призмы 6 транспортера 5 и там остается, а захваты 14 после переключения подачи воздуха в цилиндр 22 с нижней полости на верхнюю отводятся в среднее положение. Таким образом, осуществляется съем с подвески 2 сразу трех изделий 4 и передача их на приемный транспортер 5 накопителя. Траектория движения каждого захвата 14 при правильном выборе размеров щатуна и кривощипа состоит из участков, близких к прямолинейным (фиг. 11). При необходимости использования устройства для загрузки конвейера 1 изделиями 4, снимаемыми с вертикального транспортера 5, обеспечивают переключение цилиндров 21 и 22 в последовательности обратной той, которая была при разгрузке конвейера, благодаря чему направление траектории движения захватов меняется на обратное, (не показано). Применение данного устройства позволит осуществить как разгрузку, так и загрузку подвесного конвейера изделиями различной формы в поперечном сечении. Формула изобретения Устройство для разгрузки подвесного конвейера, включающее перемещающуюся синхронно с подвеской конвейера раму с фиксатором подвески, захваты для изделий и цилиндр привода захватов, отличающееся тем, что, с целью расщирения технологических возможностей, оно снабжено установленной на раме подвижной рамкой с цилиндром ее подъема, на которой размещены захваты и цилиндр их привода, при этом цилиндр привода захватов связан с каждым из захватов посредством направляющего механизма, выполненного из щатуна в виде параллельных рычагов, на конце которых закреплен захват, выполненный в виде призмы, кривощипа, соединенного с «цилиндром привода захвата, и ползущки с цилиндром фиксации захватов в среднем положении. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 612868, кл: В 65 G 47/36, 1978. 2.Авторское свидетельство СССР по заявке № 2792346/03, кл. В 65 Q 47/36, 1979 (прототип).
О
Фи1.
D
rl
(риг.6
r
Й/г.(
j:±d
Z(/z5
(«.//
