(54) МЕХАНИЗМ ШАГОВОЙ ПОДАЧИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки | 1987 |
|
SU1428561A2 |
| Автомат для сборки | 1985 |
|
SU1391857A1 |
| Вайма для сборки деревянных рам | 1977 |
|
SU791540A1 |
| Устройство для маркировки изделий | 1984 |
|
SU1348221A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Двухкоординатный стол с шаговым перемещением | 1985 |
|
SU1433750A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Устройство для нанесения клея на кромки обувных деталей из мягких материалов | 1990 |
|
SU1784202A1 |
| Машина для сборки изоляторов | 1986 |
|
SU1403107A1 |
| Устройство для автоматического управ-ления бортами платформы самосвала | 1974 |
|
SU509477A2 |
J
Изобретение относится к машиностроению, в частности к устройствам для шаговой подачи, и может быть использовано в резьбозавинчивающих станках при сборке резьбовых соединений при разношаговой подаче стола.
Известно устройство для шагового перемещения исполнительного механизма, содержащее зубчатую рейку, реверсивный привод ее продольного перемещения, выполненный в виде гидроцилиндра, взаимодействующий с рейкой фиксатор и привод его перемещения, в гидроцилиндре размещены дополнительные поршни со штоком, связанным с исполнительным механизмом 1 .
Недостатками устройства являются сложность изготовления и невозможность перемещения исполнительного механизма на шаги разной величины.
Известен механизм шаговой подачи, содержащий подвижную платформу с рейками шаговой и ускоренной подачи, привод ускоренных перемещений, пневмоцилиндр шаговой подачи с воздухораспределителем и с установпенным ЦП штоке ползуном 2.
Недостатком механизма является отсутствие возможности перемещения рейки на шаг разной величины, особенно если сумма двух последующих небольших шагов меньше одной из наибольших шагов рейки.
Цель изобретения - обеспечение перемещения на заданные разновеликие шаги.
Поставленная цель достигается тем, что ползун снабжен толкателем, шарнирно установленным с возможностью поворота вокруг оси, фиксатором и концевым выключателем, электрически связанным с воздухораспределителем пневмсщилиндра щаговсда подачи, а рейка шаговой подачи снабжена двумя кулачками, один из которых установлен на одну треть выше шаговых выступов рейки в плоскости ее перемещения, а друтой кулачок расположен в плоскости перемещения фиксатора.
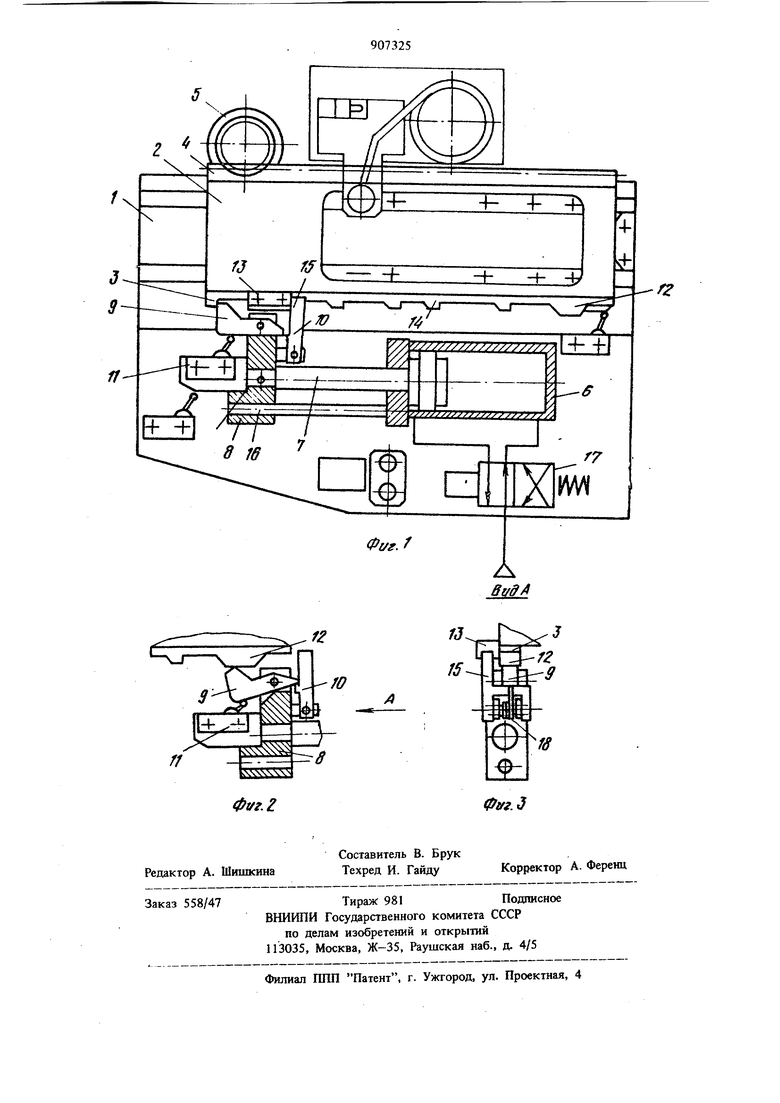
На фиг. 1 изображен предлагаемый механизм, общий вид; на фиг. 2 - толкатель в запертом положении; на фиг. 3 - вид А на фиг. 2. 9 Следящий механизм шаговой подачи сюдержит станину 1, подвижную платформу 2 с рейкой 3 шаговой подачи и зубчатой рейкой 4, кинематически связанной с силовой головкой 5 ускоренного перемещения платформы, пневмоцилиндр 6 с установленным на штоке 7 ползуном 8, снабженным толкателем 9, фиксатором 10 и концевым выключателем 11, кинематически связанным посредством толкателя 9 с рейкой 3, несущей два кулачка 12 и 13, первый из которых -на одну треть выше щаговых выступов 14 рейки и находится в той же плоскости, а второй расположен в плоскости кронштейна 15 фиксатора 10. Ползун 8 фиксируется от проворота штангой 16, смонтированной на передней крьш1ке пневмодилиндра 6, обе плоскости которого связаны с воздухораспределителем 17, а фиксатор 10 поджимается выступом к пяте толкателя 9 пружиной 18. Механизм работает следующим образом. При включении кнопки Пуск штОк 7 пневмоцилиндра 6, при выключенном электро магните воздухораспределителя 17, занимает крайне выдвинутое положение. Толкатель 9 в начале дикла находится в запертом положе нии, т.е. отведенным от рейки 3 и зафиксированным выступом фиксатора 10. Одновременно включается силовая головка 5, переме щая платформу 2 из зоны загрузки в зону начала шагов автоматической сборки. В конце быстрого хода платформы 2 кулачок 13 шаговой рейки 3 нажимает на кронштейн 15 фиксатора 10 и освобождает толкатель 9, который под действием подпружиненного ролика концевого выключателя . 11 западает во впадину рейки 3, в результате чего платформа встает на жесткий упор. После зтого силовая головка 5 отключается и включается электрическая цепь работы шпинделей (не показаны). При этом цепь управления электромагнитом воздухораспределителя 17 заблокирована. После остановки платформы 2 про изводится сборка первой группы резьбовых соединений. При достижении заданного усилия момента затяжки резьбовых соединений первой группы и выдержки времени производится отвод шпинделей и включение реле управления воздухораспределителя 17 шаговой подачи. Воздухораспределитель 17 подает сжатый воздух в другую полость пневмоцилиндра 6, 4 после чего начинается отвод штока 7 с толкателем 9, который находит на выступ рейки 3 и, отклоняясь на оси, нажимает на ролик выключателя П. Отсчет времени прохождения выступа рейки 3 заканчивается после западания толкателя 9 в следующую впадину шаговой рейки 3. Электромагнит воздухораспределителя при окончании отсчета времени отключается, реверсируя ход пневмоцилиндра 6, шток 7 которого перемещает с помощью толкателя 9 платформу вперед до упора на следующую позицию сборки резьбовых соединений. Циклы шаговых перемещений на очередные позиции сборки резьбовых соединений повторяют до тех пор, пока толкатель 9 не найдет на кулачок 12, который на одну треть больший по высоте шаговых выступов 14 рейки 3, и не зафиксируется при этом в поднятом положении выступом фиксатора 10. Снабжение ползуна толкателем, фиксатором и концевым выключателем позволило следящему -механизму обеспечить перемещение платформы на заданные разновеликие шаги. Формула изобретения Механизм шаговой подачи, содержащий подвижную платформу с рейками шаговой и ускоренной подачи, привод ycKopeifflbix перемещений, пневмоцилиндр шаговой подачи с воздухораспределителем и с установленным на штоке ползуном, отличающийс я тем, что, с целью обеспечения перемеще ния на заданные разновеликие шаги, ползун снабжен толкателем, шарнирно установленным с возможностью поворота вокруг оси, фиксатором и концевым выключателем, электрически связанным с воздухораспределителем пневмоцилиндра шаговой подачи, а рейка шаговой подачи снабжена двумя кулачками, один из которых установлен на одну треть выше шаговых выступов рейки в плоскости ее перемещения, а другой кулачок расположен в плоскости перемещения фиксатора. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 696221, кл. F 16 Н 27/00, 1977. 2. Авторское свидетельство СССР № 504624, кл. В 23 К 37/04, 1974.
