() УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОКСОВОЙ
1
Изобретение относится к устройст вам для управления электроприводов передвижением коксовых машин и может быть использовано в коксохимии.
Однако из наиболее сложных задач внедрения автоматического управ ления коксовых машин является обеспечение электроприводов перед вижения точности остановки машины у заднего места. . Существующий процесс производства кокса требует при относительно больших скоростях передвижения коксовых машин ( км/ч) и массах (например масса современного углезагрузочного вагона 185 г) большой точности их установки от +10 до +15 мм) по осям обслуживающих коксовых печей, что требует значительного снижения скорости машины перед ее остановкой. Высокая точность машин по оси обслуживаемого объекта продиктована требованиями технологии загрузки и выдачи коксовых печей. Нарушение допускаемой точное МАШИНЫ
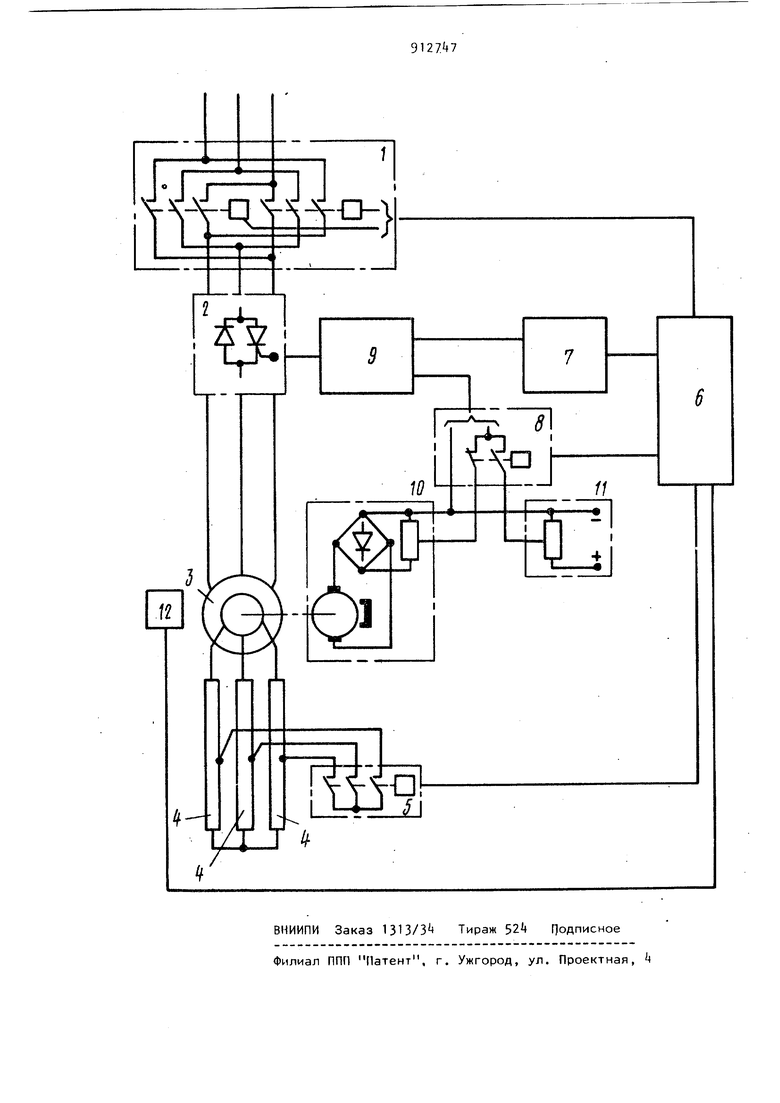
ти установки влечет за собой аварию. Это предъявляет жесткие требования к надежности выполнения автоматизированным приводом требуемых режимов перемещения коксовых машин. Чтобы обеспечить надежную остановку машины в заданнойзоне, необходимо чтобы время прохождения машиной этой зоны на ползучей скорости (которое определяется как частное от деления скорости машины на величину зоны) было больше или равно суммарному времени отключения приводного движения, времени включения тормозного момента и времени выбега машины в заторможенном состоянии. Исходя из этого, для конкретной машины и конкретных условий ее работы определяется предельно допустимая величина ползучей скорости (при которой еще возможна автоматическая остановка машины в заданной зоне), которая завиг сит от величины заданной зоны точной остановки, от быстродействия 3 тормозного устройства и применяемой аппаратуры управления, а также от м мента, создаваемога тормозным устро ством, момента статических сопротив лений и инерционной массы машины. Таким образом, для обеспечения надежной автоматической установки кок совой машины в зоне заданной точной остановки , необходимо чтобы автоматизированный привод передвижени обеспечивал вхождение машины в эту зону на ползучей скорости, не превышающей допустимую ползучую скорость. Уменьшение.величины ползучей скорости ниже допустиьюй повышает надежность автоматической Остановки машины, но ведет к увеличению необходимого машинного времени , а следовательно приводит к снижению производительности машины. Известно устройство для управления коксовой машины, содержащее пос ледовательно соединенные блок управ ления, задатчик скорости передвижения машины, регулятор интервала и п лупроводниковый коммутатор в цепи статора асинхронного электродвигателя коксовой машины, а также ревер сор, подключенный к выходу блока управления, и узел обратной связи, Это устройство позволяет осуществля регулирование частоты вращения и мо мента приводного асинхронного двигателя путем изменения интервала пр водимости тиристоров, включенных в цепи питания статора этого электр двигателя . Недостатки известного устройства состоят в том, что при пуске машины в режиме ползучей скорости (I1.j. и поэтому И..И,)при номиналь ном значении момента статических сопротивлений из-за повышенного избыточного движущего момента ( -MCTOTV-M ) разгон машины происходит рывком, что приводит к удару в механических переда чах, а главное переходной процесс разгона на ползучую скорость происходит с перерегулированием, т.е. машина разгоняется до скорости превышающей заданную, а затем за счет отрицательной обратной связи пр исходит выравнивание ее до заданной ползучей скорости, И если этот переходной процесс не успевает зако читься до момента вхождения машины 6 7 очном остановки, то очевид74но машина в эту зону входит на скорости выше допустимой ползучей скорости. Поэтому за время движения машины на этой скорости в заданной зоне не успевает произойти остановка машины и она переходит эту зону, 8момент выхода из зоны автоматически включается реверсирование ее движения. За время срабатывания аппаратуры управления и процесса снижения скорости до нулевой машина успевает немного уйти от этой зоны, а затем повторяется тот же переходный процесс разгона. В результате машинл входит в режим автоколебаний- над зоной точной остановки, т.е. не происходит автоматической остановки машины в заданном месте. Целью изобретения является повыше)ние надежности автоматической останов ки машины по оси заданного места. Указанная цель достигается тем, что устройство дополнительно содержит переключатель, соединенный с выходом блока управления, со входом регулятора интервала и узлом обратной связи, и задатчик обратной связи, подключенный к переключателю и узлу обратной связи. На чертеже изображена блок-схема устройства для управления электроприводом передвижения коксовых машин. Устройство содержит электрический реверсор 1 и регулируемый полупроводниковый коммутатор 2 в цепи статора асинхронного электродвигателя 3,в роторных цепях которого включены пуско-регулировочные резисторы U, коммутируемые коммутатором 5 управляемым блоком 6 управления, который соединен с электрическим реверсором 1 и задатчиком 7 скорости и импульсно связан с временным переключателем 8,включенным в разрыв связей регулятора 9 интервала проводимости коммутатора 2 с узлом 10 обратной связи по скорости, и с задатчиком 11, имитирующим величину обратной связи по скорости. Задатчик 7 скорости включен на вход регулятора 9интервала проводимости полупроводникового коммутатора 2. Затормаживание электропривода осуществляется тормозным приводом 12 по командам из блока 6 управления. В качестве дополнительно вводимого временного переклю чателя 8 может быть использовано, например, эг1ектромагнитное реле времени, а в качестве задатчика 11 - потенциометрический эадатчик напряжения. Выходная величина напряжения задотчика 11 должна быть не меньше величины выходного напряжения узла 10 при движении машины с допустимой ползучей скоростью.
Устройство работает следующим образом.
Для обеспечения автоматической установки подвижной коксовой машины по оси заданного места остановки электропривод передвижения машины командами из блока управления 6 в электрический реверсор 1, коммутатор 5, задатчик 7 скорости и временной переключатель 8 включается в режим ползучей скорости. При этом тормоз ной привод 12 осуществляет растормаживание электропривода передвижения, электрический реверсор 1 обеспечивает соответствующее подключение цепей статора электродвигателя 3 к фазам источника питания, а посредством коммутатора 5 в роторные цепи электродвигателя 3 вводится соответ ствующая величина сопротивления пуско-регулировочных резисторов t.Одновременно в задатчике 7 скорости (по команде из блока 6) происходит автоматическая установка задания ползучей скорости и соответствующее напряжение с его выхода поступает на вход регулятора 9 интервала проводимости, второй вход которого посредством временного переключателя 8 вместо выхода от узла 10 обратной связи по скорости подключается к выходу задатчика 11, имитирующего ве личину обратной связи по скорости. При этом из регулятора 9 на вход полупроводникового коммутатора 2 поступают такие сигналы, которые обеспечивают интервал проводимости коммутатора 2, при котором электродвига тель 3 обеспечивает движение коксово машины с допустимой ползучей скоростью. Коксовая машина плавно разго няется от нулевой до допустимой пол зучей скорости . В то же время на выходе узла 10 обратной связи по скорости ; напряжение увеличивается от нуля до величины, соответствующей допустимой ползучей скорости. По истечении заданной выдержки времени временной переключатель 8 от выхода регулятора 9 отключает задатчик 11, а вместо него подключает выход узла 10 обратной связи по скорости, т.е. задатчик 11 к регулятору 9 подключается на
время отсутствия и возрастания напряжения на выходе узла 10 до величины, соответствующей движению машины с ползучей скоростью. Когда коксовая машина входит в зону точной остановки по команде из блока управления 6 происходит отключение электрического реверсора 1 (отключается приводное t движение) и посредством тормозного привода 12 осуществляется стопорение машины. Коксовая машина останавлива-: ется в зоне точной остановки по оси заданного места. Если по каким-либо причинам ( например попутный ветер подвижная коксовая машина выкачивается за допустимую зону точной остановки по оси, то по команде из блока 6 управления в электрический реверсор 1 происходит изменение последовательности фаз питающего напряжения, подаваемого на асинхронный электродвигатель 3. Одновременно по сигналу из блока 6 во временной переключатель 8 происходит переключение регулятора 9 с выхода узла обратной связи по скорости на выход задатчика 11 , имитирующего величину обратной связи по скорости. При этом движение коксовой машины замедляется до нулевой скорости (в этот момент на выходе тахогенератора узла 10 напряжение равно нулю), а затем нaчинaetcя возврат машины в зону точной остановки. Так как в этот период вместо фактической величины обратной связи по скорости (уменьшающейся до нуля, а затем увеличивающейся до величины, пропорциональной скорости движения машины) на вход регулятора 9 подается (посредством временного переключателя 8 и задатчика 11) постоянная величина напряжения, равная величине обратной связи от узла 10 при движении машины с допустимой ползумей скоростью о (несмотря на (изменение скорости передвижения машины) интервал проводимости полупроводникового коммутатора 2 остается равным интервалу проводимости при допустимой ползучей скорости. Поэтому возврат коксовой машины в зону точной остановки происходит на скорости, не превышающей величину допустимой ползучей, что повышает надежность остановки мащины в этой зоне. В известном устройстве в момент реверсирования движения машины из-за отсутствия напряжения от узла 10 обратной связи по скорости на входе регулятора 9 интервал
79
проводимости коммутатора 2 увеличивается что убуславливает удар в редукторе механизмапередвижения машины и рывок в движении. Это приводит к тому, что 3 зону точной ос тановки машина возвращается на скорости, выше допустимой ползучей при которой время нахождения машины в этой зоне меньше, чем время включения электроаппаратуры и исполнительного устройства затормаживания хода машины, и поэтому машина не останавли вается, а начинается процесс автоколебаний машины над зоной точной остановки.
Использование предлагаемого устрой ства позволяет уменьшить удары в меха нических передачах механизмов передви жения коксовой машины в период ее автоматической центровки по оси задан ного места остановки и, тем самым повысить эксплуатационную надежность этихмеханизмов. Кроме того, повышается скорость подхода машины к зоне точной остановки при сохранении необходимой точности остановки и тем
78
самым сокращает o6iiiee машинное время обработки координат.
Формула изобретения Устройство для управления коксовой
машинь, содержащее последовательно соединенные блок управления, задатчик скорости передвижения машины , регулятор интервала и полупроводниковый коммутатор в цепи статора
асинхронного электродвигателя коксовой машины, а также реверсор, подключенный к выходу блока управления, и узел обратной связи, отличающееся тем, что, с целью обеспечения точности остановки машины по оси заданного места, оно дополнительно содержит переключатель, соединенный с выходом блока управления с входом регулятора интервала и узлом
обратной связи, и задатчик обратной связи,подключенный к переключателю и узлу обратной связи.
Источники.информации, принятые во внимание при экспертизе
1. Кокс 11 химия, 1975, №11, с. ЗЗ-З.
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное устройство обслуживания коксовых печей и затворов угольной башни | 1980 |
|
SU887619A2 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU361190A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Устройство для управления транспортным средством | 1986 |
|
SU1402452A1 |
| Программное устройство очередностиОбСлужиВАНия КОКСОВыХ пЕчЕй и зАТВОРОВугОльНОй бАшНи | 1979 |
|
SU802352A1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1978 |
|
SU768758A2 |
| Способ управления приводом электромобиля и устройство для его осуществления | 2018 |
|
RU2709639C1 |
| Технологическая линия по производству литого микропровода в стеклянной изоляции | 1979 |
|
SU1081670A1 |
| Регулируемый электропривод переменного тока | 1987 |
|
SU1494193A1 |