(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ МЕХАНИЗИРОВАННОЙ КРЕПИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления передвижением базы механизированной крепи | 1980 |
|
SU909204A1 |
| Устройство автоматического контроляпРяМОлиНЕйНОСТи МЕХАНизиРОВАННОйКРЕпи ОчиСТНОгО АгРЕгАТА | 1965 |
|
SU798314A1 |
| Способ управления перемещением базы механизированной крепи | 1980 |
|
SU877059A1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Устройство для управления перемещением базовой балки очистного агрегата периодического действия | 1980 |
|
SU1117401A1 |
| Агрегат для выемки крутых пластов угля | 1982 |
|
SU1089271A1 |
| Передвижная металлическая опалубка | 1988 |
|
SU1573192A1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ПРЯМОЛИНЕЙНОСТИ БАЗЫ КРЕПИ | 1991 |
|
RU2024765C1 |
| Способ автоматического поддерживания прямолинейности в плоскости пласта шахтных механизированных крепей | 1967 |
|
SU450892A1 |
| Устройство для управления перемещением базы механизированной крепи | 1985 |
|
SU1305374A2 |
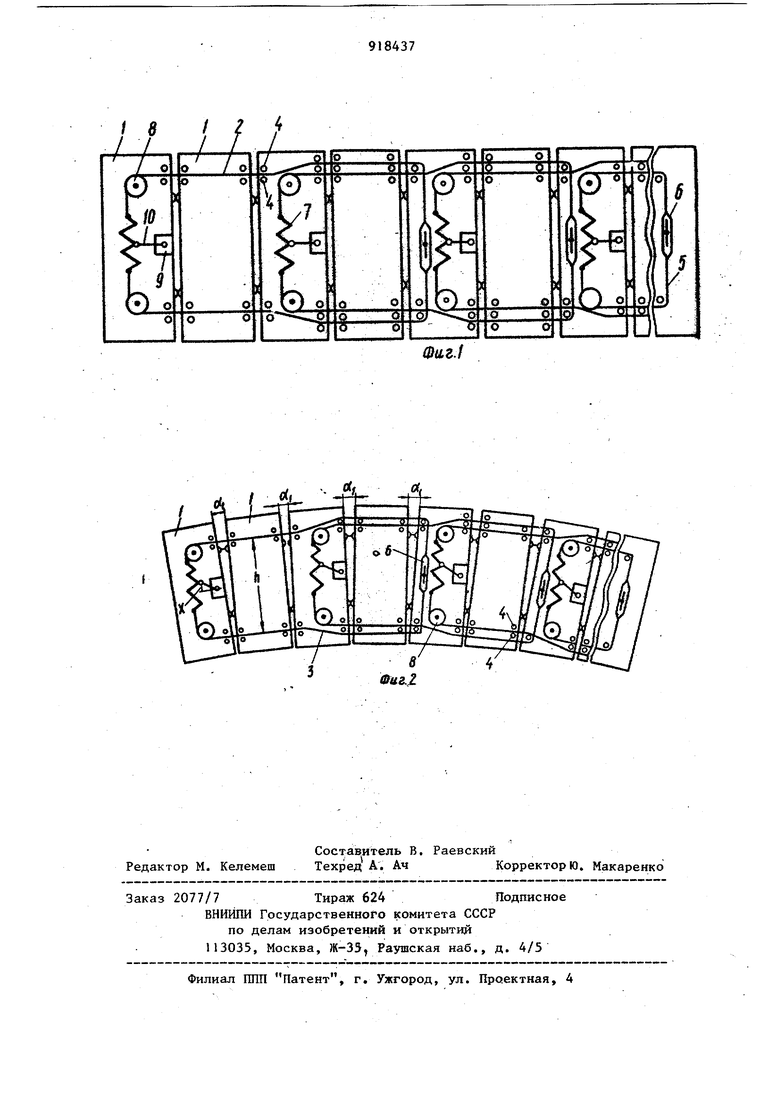
Изобретение относится к горному делу, конкретно к средствам поддержа нйя прямолинейности механизированных комплексов и агрегатов. Известно уст ойство для автомати ческого контроля прямолинейности ме хаяизированной крепи, включакицее трос и датчики прямолинейности -с п воротной кинематической парой, чере которую пропущен трос f 5 J. Наиболее близким к изобретению п технической сущности и достигаемому результату является устройство для контроля прямолинейнорти механизированной крепи, содержащей секции, включакнцие гибкую нить и датчики прямолинейности, связанные с гибкой поворотными консолями 2. Недостатком указанных устройств ляется низкая точность контроля изI малого усилия воздействия натянутой гибкой нити на поворотную консоль датчиков прямолинейности при формировании сигнала рассогласования. Цель -изобретейия - повышение точ ности контроля прямолинейности путем увеличения усилия воздействия гибкой нити на поворотные консоли. Указанная цель достигается тем, что гибкая нить выполнена в виде нескольких отдельных участков, каждый из которых охватывает группу секций, проходит вдоль периметра этой группы секций и своей серединой жестко прикреплен к секции, охватываемой смежным участком, а концы каждого участка гибкой нити связаны посредством пружины, к середине которой шарнирно прикреплена поворотная консоль. На фиг. I показана схема размещения элементов предлагаемого устройства на секциях крепи при прямолинейном их расположении; на 4иг. 2 - то же, при искривлении линии фронта крепи. 39 Устройство, установленное на секци1«х крепи I , содержит гибкую нить, состоящую из отдельных участков, каж дый из которых охватывает группу сек ций и проходит вдоль периметра этой группы, образуя замкнутый контур. Пр дольные ветви 2 и 3 замкнутых контуров проходят через опоры 4, прикрепленные к секциям у их боковых сторон. Средняя часть каждого контура, образующая поперечную ветвь 5/ жестко прикреплена к секции, охватыв емой смежным контуром, посредством планки 6. Концы контура соединены, пружиной 7, расположенной на контролируемой секции крепи. На этой же секции установлены обводные ролики 8 и датчик прямолинейности 9, прикрепленный шдрнирно посредством 10 к середине пру поворотной консоли жины 7. При прямолинейном расположении се ции крепи поворотные консоли датчиков прямолинейности находятся в не тральном положении, характеризующем прямолинейность группы секции крепи, охватываемых каждым контуром. Это состояние индицируется, например на пульте оператора как прямолинейное состояние крепи. В случае Искривления в процессе работы всей крепи или ее части, например выпуклостью на забой (фиг.2 зазоры между секциями с завальной стороны будут уменьшены, а с забойной - увеличены, соответственно удлинится ветвь 2 и сместится в сторону забоя пружина 7. Это приводит к отклонению поворотной консоли 10 относительно корпуса датчика прямолинейности 9, что индицируется на пуль те оператора. При искривлении крепи выпуклостью на завал аналогично описанному происходит отклонение поворотной консоли в противоположную сторону. При сложных искривлениях преобразуется датчиками и индицируется на пульте то состояние крепи , которое определяется состоянием отдельных групп. В предлагаемом устройстве за счет продольного смещения ветвей замкнутого контура обеспечивается повышение усилия воздействия со стороны гибкой нити на поворотную консоль датчика прямолинейности , что приводит к повьш1ению точности контроля прямолинейности. Формула изобретения Устройство для контроля прямолинейности механизированной крепи, содержащий секции, включающее гибкую нить и датчики прямолинейности, связанные с гибкой нитью поворотными консолями, от ли.чающееся тем, что, с целью повьшения точности контроля прямолинейности путем увеличения усилия воздействия гибкой нити на поворотные консоли, гибкая нить выполнена в виде нескольких отдельных участков, каждый из которых охватывает группу секций, проходит вдоль периметра этой группы секций и своей серединой жестко прикреплен к секции, охватываемой смежным участком, а концы каждого участка гибкой нити связаны посредством пружины, к середине которой шарнирно прикреплена поворотная консоль, в д Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 364746, кл. Е 21 D 23/00, 1971. 2.Авторское свидетельство СССР по заявке № 2577354/22-03, кл. Е 2 D 23/26, 1978 (прототип).
