(54) ПЛОСКОПРОКАТНЫЙ АВТОМАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Плоскопрокатный автомат | 1981 |
|
SU980907A2 |
| Плоскопрокатный автомат | 1979 |
|
SU837523A1 |
| Плоскопрокатное устройство | 1990 |
|
SU1770015A1 |
| Устройство для правки нежестких цилиндрических деталей гладкими плитами | 2019 |
|
RU2696988C1 |
| Плоскопрокатное устройство | 1978 |
|
SU764812A1 |
| Плоскопрокатное устройство для поперечно-клиновой прокатки | 1988 |
|
SU1569066A1 |
| Плоскопрокатные вальцы | 1972 |
|
SU462646A1 |
| УСТРОЙСТВО ДЛЯ ОБКАТЫВАНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ПЛОСКИМИ ИНСТРУМЕНТАМИ | 2015 |
|
RU2600302C1 |
| Автомат для раздачи концов втулок | 1991 |
|
SU1787626A1 |
| Плоскопрокатное устройство | 1979 |
|
SU818712A1 |
1
Изобретение относится к обработке металлов давлением и может быть испсхпЬ зовано при поперечно-клиновой вальцовке.
rio основному авт. св. 837 523 известен плоскопрокатный автомат, содержащий установленные в станине непо- движный рабочий инструмент, ползун с подвижным рабочим инструментом, установленным с возможностью перемещения в нащзавлении, перпендикулярном оси арс катки, устройство для Щ)авки и подачи прутка, подвижный нож, установленный на станине, механизм вьщачи заготовок, вы полненный в виде установленного в станине подпружиненного двуплечего рычага с роликом, подавателя, расположенного на двуплечем рычаге, подгфужиненного фиксатора fll.
Однако надежность использования принципа скатывания заготовки на неподвижный инструмент с наклонной несущей поверхности подавателя в верхнем его положении зависит от гравитадионньА .свойств заготовки. При подаче загчэтговок
диаметром 2...3 мм возможно их залипание на смоченной эмульсией поверхности подавателя, приводящее к возврату заготовки в зору подачи прутка с последующим ее выбросом. Кроме того, в 1фо цессе срабатывания подавателя может Происходить смещение заготовки вдЬль оси, что требует введения устройства для дополнительной ориентации заготовки относительно клинового инструмента.
to
Целью изобретения является повьоиение надежности работы и повышение качества обрабатываемых заготовок.
Поставленная цель достигается тем, что плоскопрсжаггный автомат снабжен
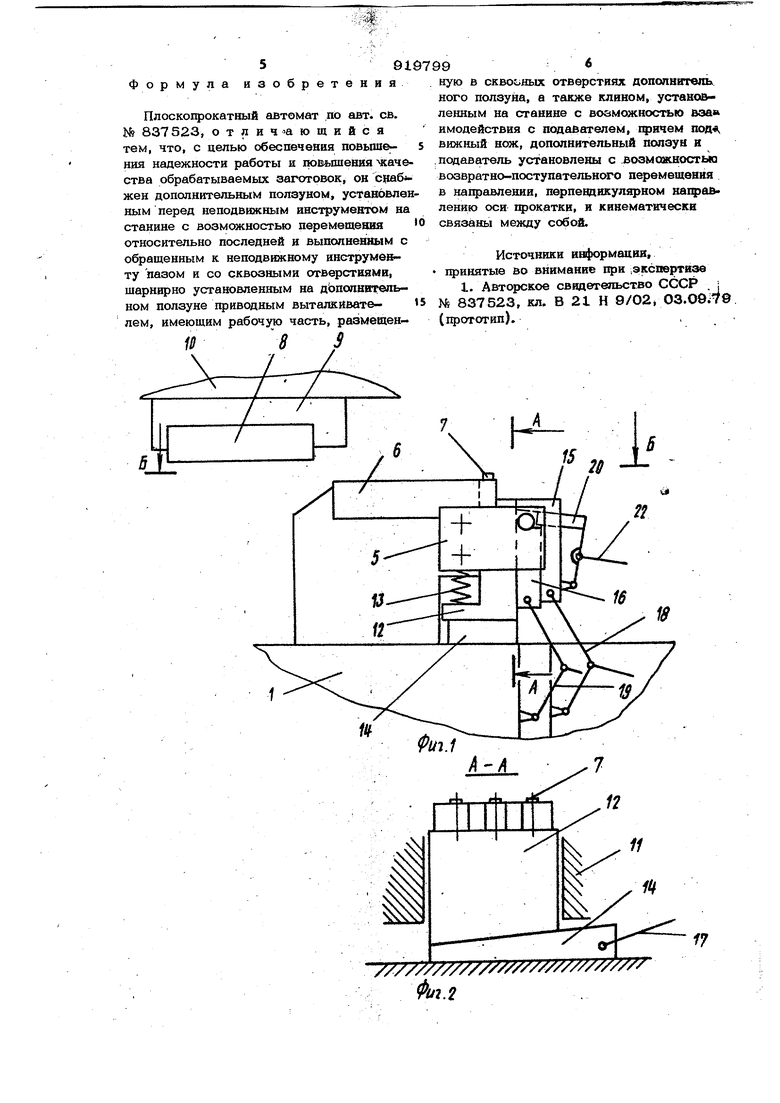
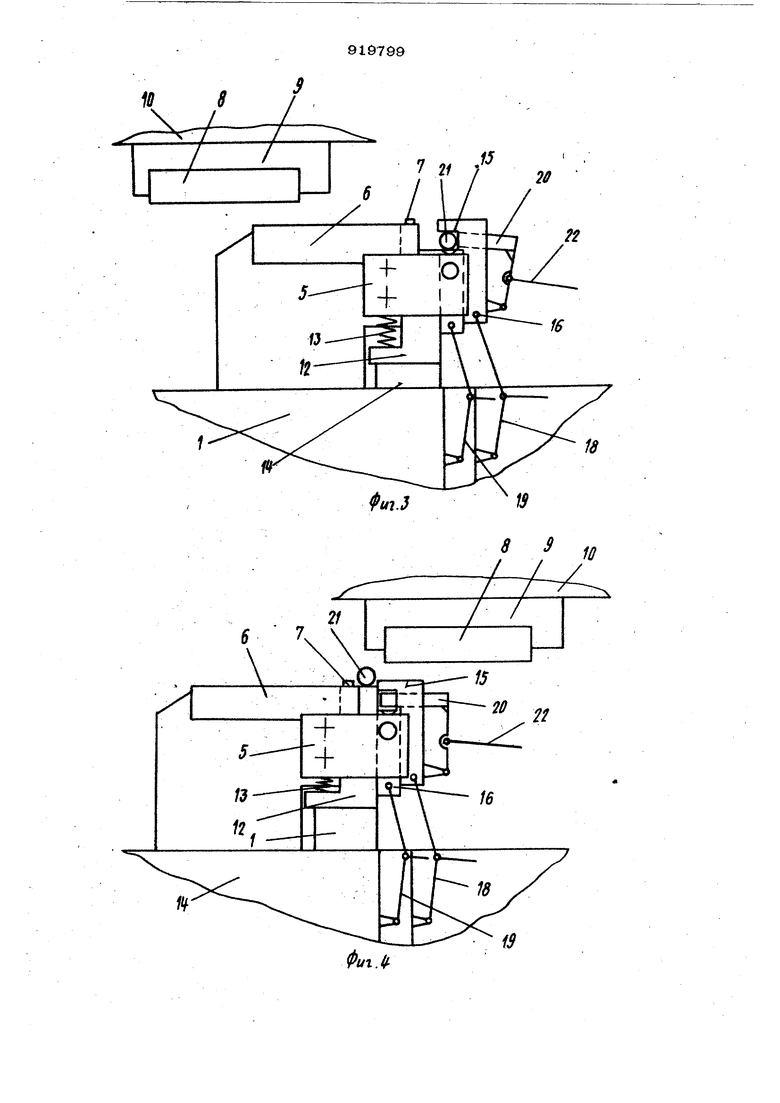
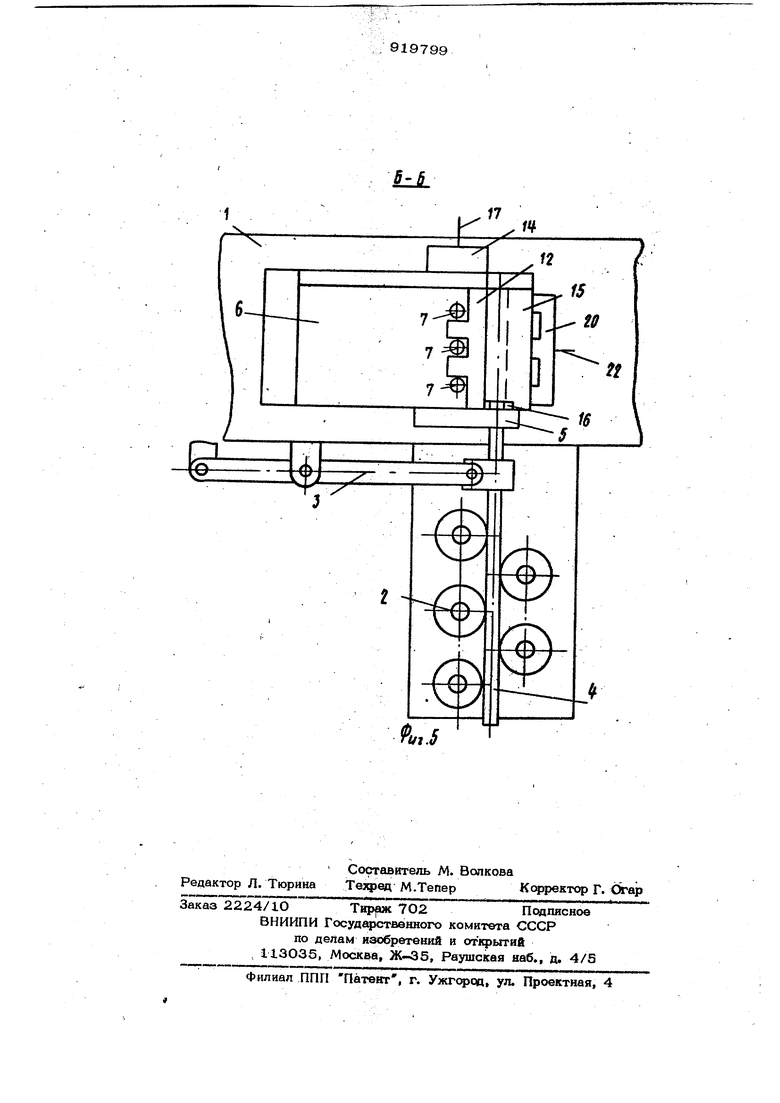
IS дополнительным ползуном, установленным церед иеподвшкным инструмевггом на станине с возможностью перемешения от носительно последней я вьшолненным с обращенным к неподвижному инструмен30ту пазом и со сквознымв отверстиями, шарннрво установленным на дополнитель ном ползуне 14 нводным выталкивателем, имеющим рабочую часть, размещенную в сквозных отверстиях дополнительного ползуна, а также клином, установленным на станине в возможност1 ю взаимодействия с подавателем, причем подвиж;ный нож, дополнительный ползун и подаватель установлены с возможностью возвратнопоступательного перемещения в направлении, перпендикулярном направлению оси прокатки, и кинематически связаны межд собой. На фиг. 1 показан автомат в момекг подачи прутка, общий вид; на фиг. 2 А-А на фиг. 1; на фиг. 3 - автомат в момент завершения резки заготовки, общий вид; на фиг. 4 - автомат в момент вьщачи заготовки на позицию ее захвата инструментами, общий вид; на фиг. 5 - разрез Б-Б на фиг. 1. На фиг. 1,3 и 4 устройства для правки и лодачи iqjyTKa условно не показаны. Плоскопрокатный автомат содержит ртанину 1, на которой установлены устройство для правки 2 И устройство для подачи 3 прутка 4 во втулочный неподвйжный нож 5. Устройство для подачи 3 снабжено захватом прутка, подобным цанговому зажиму. На станине 1 также установлены нижний неподвижный инструмент 6 и подпружиненный фиксатор 7. Верхний подвижный инструмент 8 смонти рован на ползуне 9, совершающем возвратно-поступательное перемещение по направляющим 10. Справа от неподвижного инструмента 6 в направляющих 11 размещены подаватель 12, подгфужиненный пружиной 13 и опирающийся на клин 14, дополнительный ползун 15 с 1фием ным пазом, открытым со стороны подавателя 12, и подвижный нож 16, приводимые в возвратно-поступательное перемещение перпендикулярно движению ползуна 9 соответствующими системами рычагов 17 - 19 В отверстиях дополнительного ползуна 15, перпендикулярны его приемному пазу, установлен приводной выталкиватель 20 заготовки 21, пр водимый в движение системой рычагов 22 Автомат работает следующим образом При перемещении ползуна 9 по нащза ляющим 10 станины 1 справа налево дополнительный ползун 15 и подвижный нож 16 ояускакугся с помощью систем рычагов 18 и 19 вниз. При этом приемный паз дополнительного ползуна 15 и рабочая поверхность подвижного ножа 1б устанавливаются напротив отверстия неподвижного ножа 5. После этого пруток 4 из бунта, проходя правку между роликами устройства 2, подается с помощью подачи 3 в отверстие неподвижного втулочного ножа 5 на величину, соответствующую длине заготовки 21. алее подаватель 12 под действием пружины 13 опускается вниз. При этом система рычагов 17 смещает клин 14. Затем подвижный нож 16 синхронно с дополнительным ползуном 15 системами , рычагов 19 и 18 передвигаются вверх по направляющим 11. Происходит резка заготовки 21. При подходе к верхнему крайнему положению подвижный нож 16 отстает от дополнительного ползуна, 15, рабочая часть его поднутряется относительно несущей поверхности приемного паза ползушки. Заготовка 21 перемещается выталкивателем 20 от системы рычагов 22 на несущую плоскость подавателя 12. При подходе ползуна 9 к крайнему 1фавому положению Начинается перемеще- кие подавателя 12 вверх под действием перемещения клина 14 от системы рычагов 17. При завершении хода ползуна 8 в крайнее правое положение несущая плоскость подавателя 12 становится за подлицо с неподвижным инструментом б.Заготовка 21 располагается между фиксатором 7 и выступакяцей над инструментом 6 верхней частью дополнительного ползуна 15 на жестко зафиксированном клином 14 подавателе 12. При перемещении ползуна 9 справа налево заго- . товка 21 захватывается клиновыми элементами -йиструментов 8 и 6.. Подпружиненный фиксатор 7 утапливается, а затем возвращается в исходное положение. Про-; исходит процесс вальцовки, при заверщении которого готовое изделие падает с нижнего неподвижного инструмента 6 в тару. Далее дополнительный ползун 15с подвижным ножом 16 и подаватель 12 перемещаются вниз и занимают исходное положение. Происходит очередная подача прутка и процесс работы автомата повторяется. Данное техническое рещение позволяет обеспечить надежность работы автоматической подачи плоскопрокатного автомата за счет обеспечения стабильности подачи щтучных заготово с как больщих, так и малых диаметров из зоны резки в зону клиновой вальцовки. Использование блока подвижного ножа, образованного дополнительный ползуно л и собственно подвижным ножом позволяет повысить качество реза заготовок. Формула изобретения Плоскопрокатный автомат до авт. св. № 837523, отлиЧающийся тем, что, с целью обеспечения повыше-НИН надежности работы и повышения жачества обрабатываемых заготовок, он дополнительным ползуном, установлен ным перед неподвижным инструментом на станине с возмсжностью перемешенвя относительно последней и выполненным с обращенным к неподвижному инструменту пазом и со сквозными отверстиями, шарнирно установленным на дЬпопнвтельном ползуне приводным выталкивателем, имеющим рабочую часть, размещенную в сквооных отверстиях допопнитепь ного ползуна, а также клином, установленным на станине с возможностью взав имодействия с подавателем, сфнчем под«, вижный нож, дополнительный ползун и подаватель установлены с .возможностью возвратно-поступательного перемещения в натфавлении, перпендикулярном лению оси црокатки, и кинематически связаны между собой. Источники ивформацин, принятые во внимание при .экспертизе 1. Авторское свидетельство сЬСР . j № 837523, кл. В 21 Н 9/02 ОЗ.О0.70 (прототип).,
л
////////////////// // /
Фт.2 8 Фиг. I/. 9
17
т
