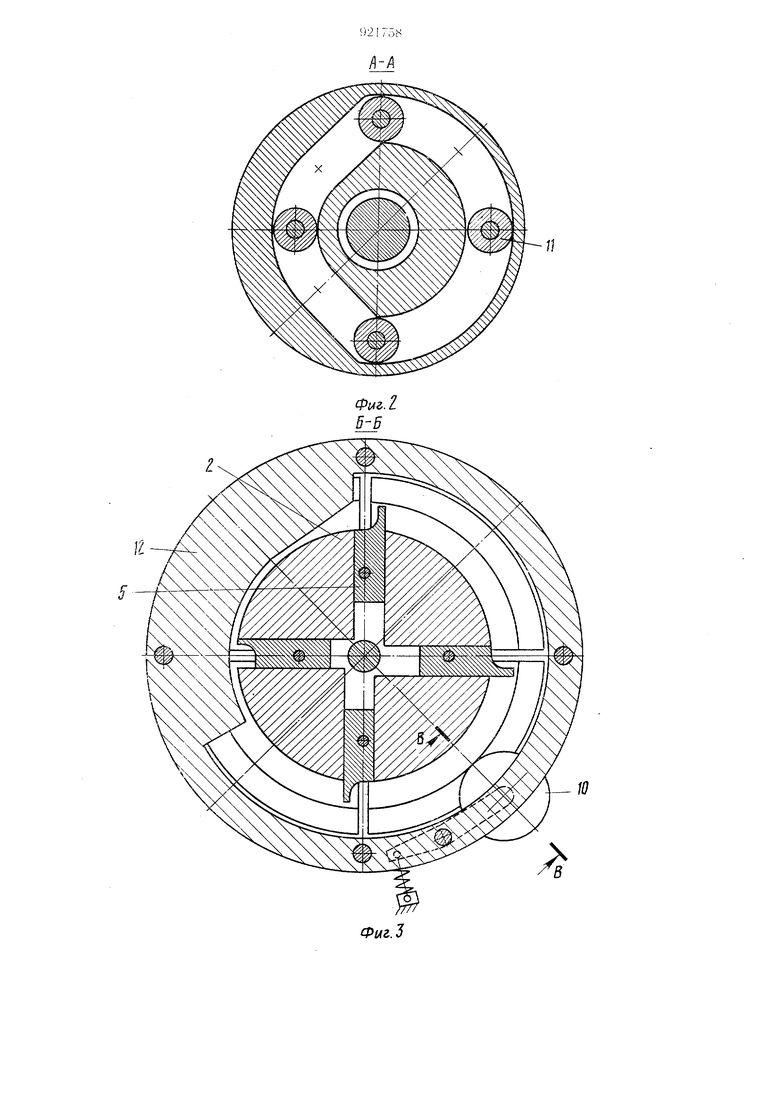
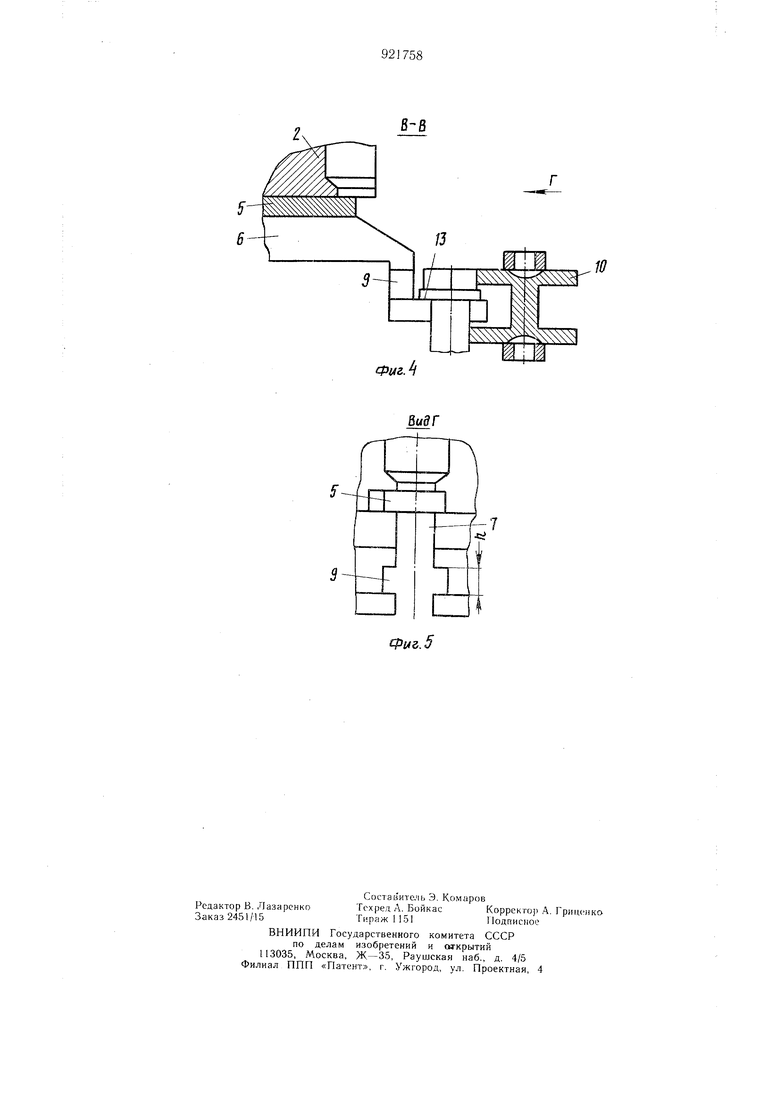
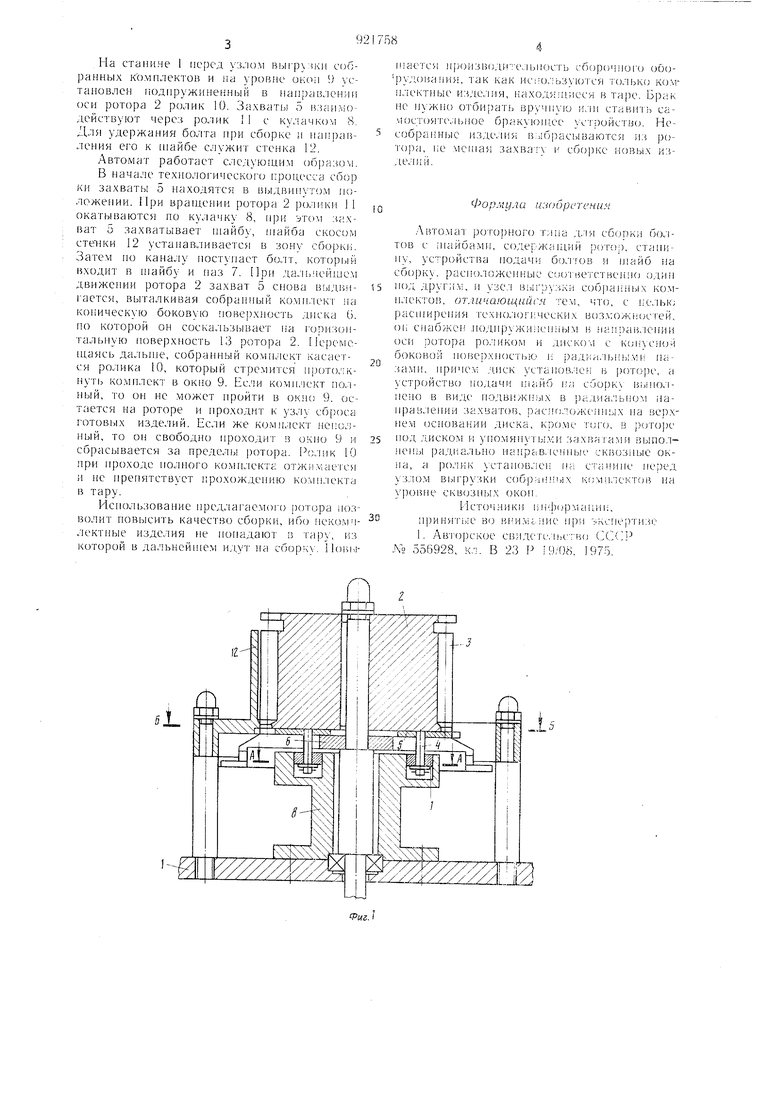
(54) АВТОМАТ РОТОРНОГО ТИПА ДЛЯ СБОРКИ БОЛТОВ С ШАЙБАМИ Изобретение относится, к сборочному оборудованию, преимущественно для механосборочных работ, и может найти применение в различных отраслях техники. Известен автомат роторного типа для сборки болтов с шайбами, содержащий станину, устройства подачи болтов и щайб на сборку, расположенные соответственно один под другим, и узел выгрузки собранных комплектов 1. Недостатком известного автомата является отсутствие сортирующего механиз.ма для обеспечения исключения из потока некомплектных сборок. Цель изобретения - расширение технологических вОзможностей. Поставленная цель достигается тем, что автомат снабжен подпружиненным в направлении оси ротора роликом и диском с конусной боковой поверхностью и радиальными пазами, причем диск установлен в роторе, а устройство подачи на сборку щайб выполнено в виде подвижных в радиальном направлении захватов, расположенных на верхнем основании диска, кроме того, в роторе под диском и упомянутыми захватами выполнены радиально направленные сквозные окна, а ролик установ.чен на станине перед узлом выгрузки собранных комплектов на уровне сквозных окоп. На фиг. 1 - показан предлагаемый ротор, общий вид; ка фиг. 2 - разрез А- .А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - ,внд Г на фиг. 4. На станине 1 смонтирован ротор 2, по периферии которого выполнено устройство 3 для подачи болтов на сборку и устройство 4 для подачи щайб, расположенные соответственно один под другим, а также узел выгрузки собранных комплектов (не показан). Устройство 4 выполнено в виде подвижных в радиальном направлении захватов 5. В роторе 2 под захватами 5 расположен диск 6 с конусной боковой поверхностью и радиальны.ми пазами 7 под болт, а также пазовый кулачок 8. В корпусе ротора 2 или в диске 6 выполнены радиально направленные сквозные окна 9, высота которых несколько больще, чем высота головки болта, но меньще чем высота болта с щайбой.
На станине I перед уз.ю.м вы1р -,кн собранных кЪ.мплектов и иа ypoBiic OKCIH s установлен подпружиненный в направлении оси ротора 2 ролик 10. Захваты 5 li.uui.Moдействуют через ролик 1 1 с ку.чачком 8. ,Цл51 удержания болта при сборке si нанра(ь леиия его к иишбе служит етеика 12.
Автомат работает следующим .
В начале техиол01Л1ческог(; ироцееса сбор ки захваты 5 находятся в в| |двни т,)м иоложеиии. При вра1цении ротора 2 ро.тики И окатываются по ку;1ачку 8, ири ()м за;хват 5 захватывает иижбу, Н1айба екосом стенки 12 устанавливается в зону сборки. Затем но каналу иоетуиает болт, который входит в И1айбу и иаз 7. При да;И) движении ротора 2 захват 5 снова в)1дв.и|ается, выталкивая собранный комнлект иа ко1 ическую боковую 1оверхиость диска ь. по которой он соека,льз151вает на горизонтальную иоверхиоеть 13 ротора 2. 11е|)еме цаясь дальи1е, собранный комилект каеается ролика iO, который стремится ирото/П;нуть комнлект в окно 9. Если комилект иолиый, то он не может пройти в окис; 9. оетается иа роторе н проходит к узлу ГОТОВВ1Х изде,чий. Если же комилект иенолный, то он свободно проходит в окно 9 м сбрасывается за иределы ротора. PO.TIIK 10 ири ироходе полного ко.мн.текта отжи.м.аетея и ие нренятствуст ирохождеиию ком 1лекта в тару.
Использование иред.тагаемого ротора ноз130ЛИТ новысить качество сборки, ибо SICKO.MHлектные изделия не ноиадают в та|лу, из которой в дальиеЙ1ие.м ил.ут иа сборку, iloiibi4
шаетси и юмзвиднге.лыюсть сборолюго ооору;:.()н;1лии, так как иеп().:ьзук;тоя толькм комiLicivTHbie .111я, каходялиюся в Брак не нужно отбиг)ать вручную ь1н етаннть сал1Оет(ШГ(:Н)Ное бракующее verooHfroci. Нособранные нзде.1ня :,бр-асыиаются из ро1Ч)|)а, i;e метай захва у i-- еборке новых изделий.
Формула изобритени.ч
Лвтолип роторного тана д.чя еборкн б(Х1тов е шайбамн, содер/кан1мй 1)от()р. станину, усройетва подачи бо.ггов н найб на сборку, раеноложонные с(1ответетве11но один под другим, и узел eo6paii ibix комiLiCKTOB, отличающийся тем, что, е .к; расширения техliOJKjn-;ческих воз.;ож1;иетей, ои енабжен .ноднружииеплым в 1аи 1авлении оси ротора ролико.м н диском е Koiiycuijn боковой нове;)хностью i; )адиа.ирными на.замн, нрнче.м л.иск установ.1е.и в роторе, а стрс;йство иодачи 1лайб i; ебо)ку выно.1неио в ВНД1 ггэлвнжгых в )алиальном нанравлении захватов, расиол(;/ксН11ЫХ на верхне.м осиованин днска, кроме Tortj, в jJoTopc под диско.м и уно.мянут1;1.Л захва гами выполнены радиально наирав. 1синые сквозлвю окиа, а ролнк установле); па етаинне неред узлом вьп рузкн собр-и1 иых комплектов на уровне сквозных OKOir
И стоп НИК г; нфор м а ЦП и,
ирииять;е во i«n-iAiiUHe при экспертиз
1. Авторекое свидете, СС(.Р К« 556928, к/1. В 23 Р 9;08. 1975.
Г
10
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочный ротор | 1982 |
|
SU1050845A1 |
| Автомат для сборки болтов с шайбами | 1985 |
|
SU1349953A1 |
| Сборочный автомат | 1986 |
|
SU1414542A2 |
| Автомат роторного типа для сборки болтов с шайбами | 1975 |
|
SU556928A1 |
| Роторный автомат питания | 1983 |
|
SU1129056A1 |
| Автоматическая роторно-конвейерная линия для сборки медицинской иглы однократного применения | 1990 |
|
SU1775266A1 |
| Роторно-конвейерная машина | 1980 |
|
SU940993A1 |
| Автомат для сборки болтов с шайбами | 1980 |
|
SU921759A1 |
| АВТОМАТ ДЛЯ СБОРКИ ИГОЛЬЧАТЫХ ПОДШИПНИКОВ | 1970 |
|
SU425003A1 |
| Роторный автомат питания | 1982 |
|
SU1077756A2 |