ел
4
to
ГЧ)
Изобретение относится к машиностроению, может быть использовано при изготовлении ключей для замков и является усовершенствованием сборочного автомата по авт. св. № 1273227.
Целью изобретения является повышение надежности сборочного автомата за счет обеспечения необходимой ориентации собранного комплекта ключей при перемеще- ниц его в захватный лаз транспортирующего поворотного стола.
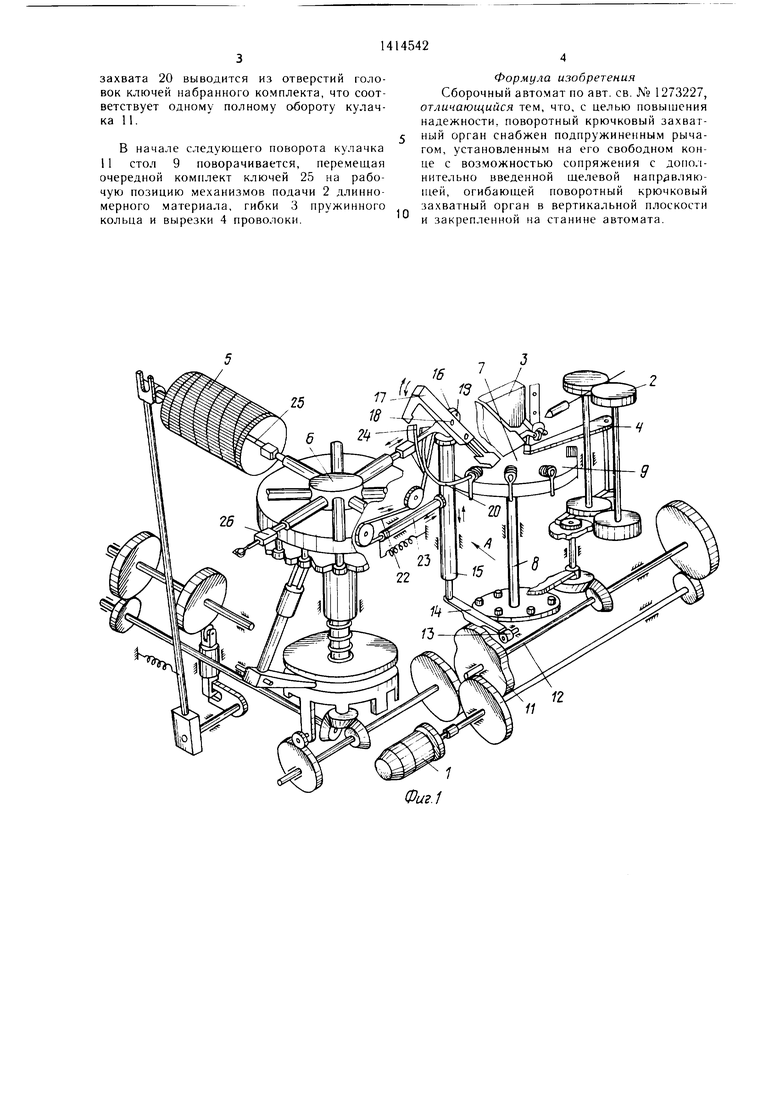
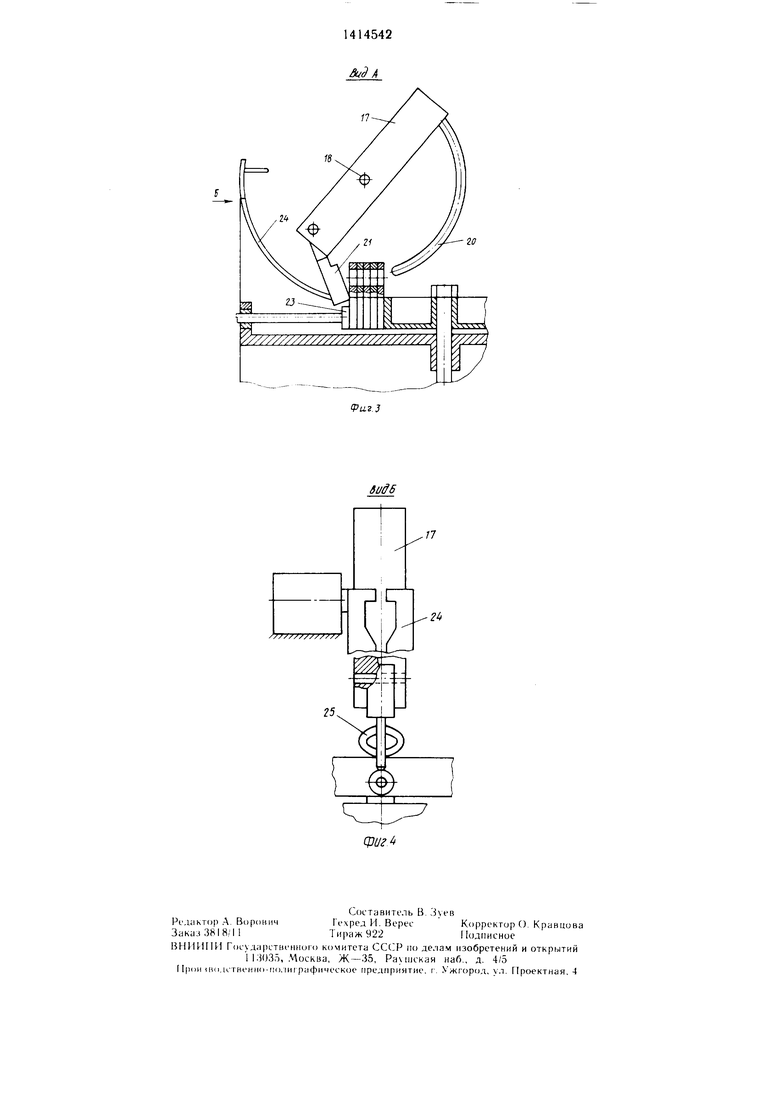
На фиг. 1 изображена кинематическая схема сборочного автомата; на фиг. 2 - вид А на фиг. 1 (механизм набора комплекта ключей в процессе набора комплекта): на фиг. 3 - то же, в момент установки комплекта в радиальный паз стола; на фиг. 4вид Б на фиг. 3 (щелевая
направляющая ориентации стержня ключа). Автомат содержит станину (не показана) с установленными на ней и кинематически связанны.ми с приводом 1 (фиг. 1) и между собой механизмо.м 2 подачи-длинномерного материала, ме.ханизмом 3 гибки пружинного ко,||ьца, механизм 4 вырезки проволоки, а также механизм подачи штуч- ны.ч ключей, включающий в себя за1 рузоч- ный механизм 5 и транспортный р(пор 6. Между транспортным ротором 6 .ме.чаниз- ма нодачи штучных ключей и механизмом 3 гибки пружинного ко,:1ьца размещен механизм 7 набора комнлекта к,1К)чей, содержащий установленный на валу 8 стол 9, на периферии которого выгюлнены радиальные пазы К). Кулачок И, закреп. 1еп- ный на ва.чу 12 и кинематически связанный с приводом 1, взаимодействует с шарнирно установленным tia пальце 13 ры- чагом 14, на конец которого опирается штанга 15, контактирующая с роликом 16 поворотного крючкового за.хватного органа, выполненного в виде двуплечего рычага 17, ось 18 которого смещена относительно оси 19 ролика 16. На нижнем конце рычага 17 закренлен крючковый- захват 20, а другое плече -рычага 17 снабжено подпружиненным рычаг ом 21. Р)1ча 17 через гибкую тягу 22 связан г то.кателем 23, который установ. К и с (озможшд, ibio взаимо- действия с периферией noBopoTHoi o стола 9.
Крючковый за.хваг 20 с внсмппей стороны огибает установ, 1енная на станине авто.мата щелевая направляющая 24, паз которой обеспечивает ориентацию оси стержня ключей 25 относительно осей базирую- ишх радиальных пазов 10 поворотног о стола 9 в нроцессе изв;|ечения ключей крючковым захватом 20 из захватов 26 транспортного ротора 6.
Автомат работает следующим обра-
зом.
Вращение от алектродвигате,1Я (4)иг. 1) но жесткой кинематической связи передает
0 о 5 5
0
0
ся транспортному ротору 6 механизма подачи штучных ключей 25. Одновременно шиберный питатель загрузочного механизма 5 передает очередной ключ 25 в захват 26 транспортного ротора 6.
В момент загрузки ключа в захват 26 транспортный ротор неподвижен. Далее, по мере вращения ротора 6, ключи 25 последовательно подаются захватами 26 транспортного ротора 6 в механизм 7 набора комплекта ключей. От вала 12 вращение передается кулачку 11. По мере поворота вала 12 поворачивается профильный кулачок 11, взаимодействующий с рычагом 14, поворачивает его вокруг пальца 13. При этом рычаг 14 неремещает вдоль оси пп ангу 15, которая, воздействуя на ролик 16, установленный на двуплечем рычаге 17, поворачивает последний вокруг оси 18. Рычаг 17, поворачиваясь, вводит крючковый захват 20 в отверстие головки ключа 25, установленного в захвате 26. Затем захват 26 перемещается вдоль оси к центру транспортного ютора 6. Так как в момент перемещения захвата 26 свободный конец крючкового захвата 20 введен в отверстие головки ключа 25, то ключ извлекается из захвата 26 и соскальзывает но крючково- м захвату 20 к радиальному пазу 10 стола 9. При этом стержень ключа 25 ||)едварительно введен в паз щелевой на- ||)ав,|яющей, крючковый захват 20 ориентируется относительно оси базирующего |);1диального паза 10 поворотного стола 9. Л;1лее по мере поворота кулачка 11 nriaid a 15 опускается, двуплечий рычаг 17 по|«)рачивается вокруг оси 18 в обратном направ. 1ении, при атом свободный конец крючкового захвата 20 выводится из зоны ранее изв,:1еченн()го из захвата 26 ключа 25, а в освободившуюся зону вводится последующий захват 26 с ключом 25. При дальнейшем повороте кулачка 11 и танга 15 поднимается и свободный конец крючкового захвата 20 вводится в отверстие оче редног о ключа 25, входящего в комплект. Так как комнлект ключей состоит из пяти 1птук, то за один оборот кулачка 11 транспортный рогор 6 выполняет пять фиксированных поворотов па заданный угол. Никл съема ключей 25 с захватов 26 также повторяется пять раз. При снятии последнего пятого ключа с захвата 26 двуплечий рычаг 17 поворачивается на больший угол, при этом подпружиненный рычаг 21,закрепленный на втором плече поворотного рычага 17, скользит по поверхности щелевой направляющей
24,ориентируя набранный комплект ключей
25,а толкатель 23, связанный посредством i ибкой тяги 22 с вторы.м плече.м рычага 17, заталкивает комплект ключей 25 в радиальный паз 10 стола 9, при этом однов)еменио свободный ко1,ец крючкового
захвата 20 выводится из отверстий головок ключей набранного комплекта, что соответствует одному полному обороту кулачка 11.
В начале следующего поворота кулачка 11 стол 9 поворачивается, перемещая очередной комплект ключей 25 на рабочую позицию механизмов подачи 2 длинномерного материала, гибки 3 пружинного кольца и вырезки 4 проволоки.
Формула изобретения Сборочный автомат по авт. св. Хе 1273227, отличающийся тем, что, с целью повыщения надежности, поворотный крючковый захватный орган снабжен подпружиненным рычагом, установленным на его свободном конце с воз.можностью сопряжения с допо.1- нительно введенной щелевой иапр вляю- П1.ей, огибающей поворотный крючковый захватный орган в вертикальной плоскости и закрепленной на станине автомата.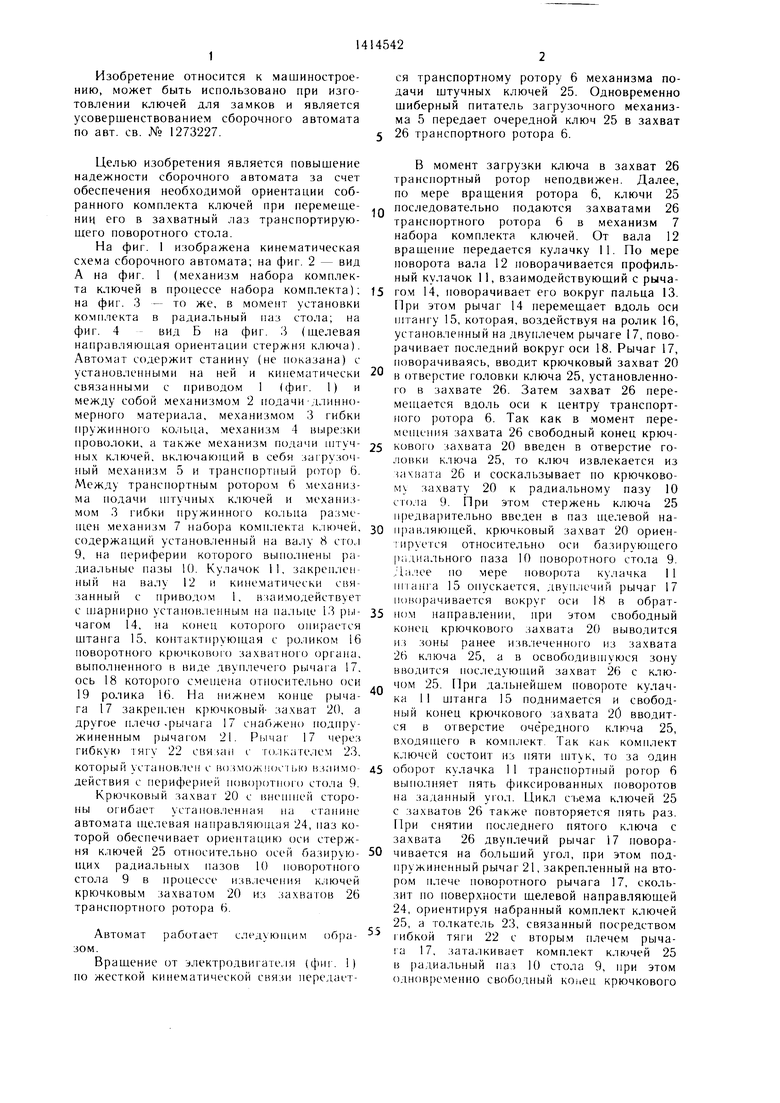
| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочный автомат | 1984 |
|
SU1273227A1 |
| Роторный автомат питания | 1976 |
|
SU564139A1 |
| АВТОМАТ ДЛЯ СБОРКИ ПЛАСТИН МАСЛОФИЛЬТРА | 1972 |
|
SU340507A1 |
| Автомат для завинчивания шпилек | 1985 |
|
SU1355438A1 |
| Загрузочный ротор | 1990 |
|
SU1780988A1 |
| Манипулятор | 1984 |
|
SU1222536A1 |
| Устройство для групповой сборки и пайки монолитных керамических конденсаторов | 1988 |
|
SU1599912A1 |
| Устройство для набора плоских деталей в стопку | 1980 |
|
SU905141A1 |
| Автомат для сборки внутреннего блока конического роликоподшипника | 1953 |
|
SU121712A1 |
| Станок для сборки ротора с комплектами пластин противовесов | 1971 |
|
SU562042A1 |
Изобретение относится к машиностроению и может быть использовано в сборочных автоматах для набора комплектов ключей для замков. Целью изобретения является ювышение надежности сборочного автомата за счет обеспечения необходимой ориентации собранного комплекта ключей при перемещении его в захватный паз транспортирующего поворотного стола. Для этого поворотный крючковый захватный орган снабжен подпружиненным рычагом 21, установленным на качающемся рычаге 17 с возможностью сопряжения с щелевой направляющей 24. По окончании набора необходимого количества ключей на крючковом захвате 20 рычаг 17 поворачивается против часовой стрелки. При этом рычаг 21 заходит в щелевую направляющую, в которой также находятся ключи, висящие на захвате 20. В результате поворота рычага 17 приводится в движение толкатель 23, который перемещает комплект ключей, сориентированный рычагом 2 в направляющей 24, в паз поворотного стола 9. 4 ил. (О (О
Фuг.f
77
2
| Сборочный автомат | 1984 |
|
SU1273227A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
