(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и сортировки линз | 1980 |
|
SU910231A1 |
| Захватное устройство | 1986 |
|
SU1400876A1 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2318653C2 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1994 |
|
RU2073601C1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Многопозиционный пресс для штамповки изделий | 1991 |
|
SU1819177A3 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Напольное устройство для автоматического расцепления единиц подвижного железнодорожного состава | 1982 |
|
SU1084164A2 |
I
Изобретение относится к машиностроению и может быть применено в оптико-механической промышленности для укладки оптических деталей в кюветы для их последующей транспортировки и хранения.
Известен манипулятор для оптических деталей, содержащий пнёвмоци-. линдры горизонтального и вертикального перемещений,а-также захватйую часть fl.
Недостатком известного манипулятора является сложность конструкции.
Цель изобретения- упрощение конструкции.
Эта цель достигается тем, что Манипулятор снабжен пневмоцилиндром наклона захватной части, который смонтирован на конце штока пневмоцилиндра горизонтального перемещения, причем шток пневмоцилиндра горизонтального перемещения выполнен полым и через .неро рабочая полость пневмоцилиндра горизонтального пе,ремещения связана с рабочей полостью .пневмоцилиндра наклона захватной части..
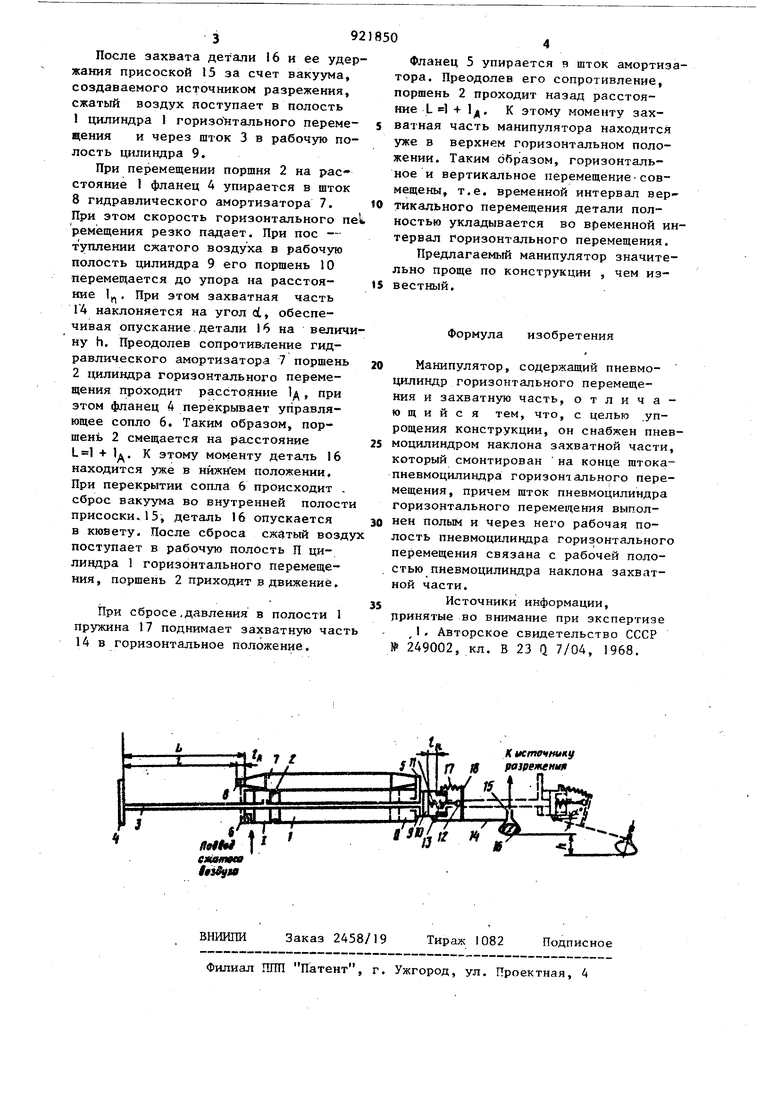
На чертеже схематично представлено устройство,продольный разрез.
Манипулятор содержит пнёвмоцилиндр 1 горизонтального перемеще я с поршнем 2, полый шток 3 KOTOpoW несет упорные фланцы 4 и 5. На торце цилиндра 1 расположено управляющее сопtoло 6. Гидравлический амортизатор 7 со штоком 8 жестко крепится к цилиндру 1. На конце штока 3 крепится пнёвмоцилиндр 9 с поршнем
1 Oj штоком 11 с роликом 12. Пружина 13
15 удерживает поршень IО в левом крайнем положении. Захватная часть 14, которая несет присоску 15 для удержания детали 16,- шарнирно крепится к цилиндру 9. Пружина 17 поджимает г
20 рычаг 18, скрепленный с захватной частью 14, к ролику 12.
Манипулятор работает следующим 067 разом. 39 После захвата детали 16 и ее удер жания присоской 15 за счет вакуума, создаваемого источником разрежения, сжатый воздух поступает в полость 1 цилиндра 1 горизо 1тального перемецения и через шток 3 в рабочую полость цилиндра 9. При перемещении поршня 2 на расстояние I фланец 4 упирается в шток 8 гидравлического амортизатора 7. При этом скорость горизонтального ne ремёщения резко падает. При пос - туплении сжатого воздуха в рабочую полость цилиндра 9 его поршень 10 перемещается до упора на расстояние Ц. При этом захватная часть 14 наклоняется на угол d, обеспечивая опускание детали 16 на велич ну h. Преодолев сопротивление гидравлического амортизатора 7 поршень 2 цилиндра горизонтального перемещения проходит расстояние 1д, при этом фланец 4 перекрьшает управляющее сопло 6. Таким образом, поршень 2 смещается на {расстояние + 1д. К этому моменту детапь 16 находится уже в нижнем положении. При перекрытии сопла 6 происходит . сброс вакуума во внутренней полост присоски.15, деталь 16 опускается в кювету. После сброса сжатый возд поступает в рабочую полость П цилиндра 1 горизонтального перемещения, поршень 2 приходит в движение. При сбросе.давления в полости 1 пружина 17 поднимает захватную част 14 в горизонтальное положение. Фланец 5 упирается а шток амортизатора. Преодолев его сопротивление, поршень 2 проходит назад расстояние L 1 + д. К этому моменту захватная часть манипулятора находится уже в верхнем горизонтальном положении. Таким образом, горизонтальное и вертикальное перемещение-совмещены, т.е. временной интервал вертикального перемещения детали полностью укладывается во временной интервал горизонтального перемещения. Предлагаемый манипулятор значительно проще по конструкции , чем известный. Формула изобретения Манипулятор, содержащий пневмоцилиндр горизо 1тального перемещения и захватную часть, отличающийся тем, что, с целью .упрощения конструкции, он снабжен пневмоцилиндром наклона захватной части, который смонтирован на конце штокапневмоцилиндра горизонтального перемещения, причем шток пневмоцилиндра горизонтального перемещения выполнен полым и через него рабочая полость пневмоцилиндра горизонтального перемещения связана с рабочей полостью пневмоцилиндра наклона захватной части. Источники информации, принятые во внимание при экспертизе ,I. Авторское свидетельство СССР № 249002, кл. В 23 Q 7/04, 1968.
