(54) УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ тВЕРХНОСТИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для неразрушающего контроля поверхности цилиндрических изделий | 1984 |
|
SU1161860A2 |
| Контрольно-сортировочное устройство | 1979 |
|
SU848099A1 |
| Сканирующее устройство дефектоскопа | 1979 |
|
SU974252A1 |
| Установка для ультразвуковой дефектоскопии круглого проката или труб в процессе их производства | 1990 |
|
SU1728788A1 |
| Устройство для ультразвукового контроля внутренних полостей изделий | 1984 |
|
SU1262360A1 |
| Штамп-автомат | 1985 |
|
SU1296266A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| МЕХАНИЗМ УСТАНОВКИ ДАТЧИКОВ ДЛЯ СКАНИРУЮЩЕГО УСТРОЙСТВА ДЕФЕКТОСКОПИИ ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 2000 |
|
RU2186367C1 |
| Установка для нанесения покрытий | 1985 |
|
SU1288141A1 |
| Самоцентрирующий патрон для закрепления эксцентричных деталей | 1988 |
|
SU1572759A1 |
I
Изобретение огносится к средатвам неразрушающего контроля и может был использовано для контроля потока цилиндрических изделий в любой отрасли машиностроения.
Известно устройство для неразрушающего контроля поверхности цилиндрических изделий, содержащее два транспортирующих валка с пазами для иаделия и преобразователь для контроля его цилинчдрической поверхносга Г1.
Недостатком известного устройства является то, что оно осуществляет конт роль только боковой поверхности изделий.
Цепь изобретения - автоматизация контроля всех поверхностей изделий.
Поставленная цель достигается тем, что устройство снабжено двумя соосно размещенными преобразователями для контроля торцовых поверхностей, один из которых установлен неподвижно,узлом коррекции положения второго преобразователя, и механизмом перемещения преобразователей, выполненным в виде сооо ного с одним из валКов кулачка, взаимодействующего с ним при помощи проме- жуточного ролика рычага, на конце которого размещен преобразователь для контроля цилиндрической псверхносте, выполненный в виде опорного ролика, а оси всех преобразователей расположены в одной плоскости.
Причем узел коррекции положения вто10рого преобразователя выполни в виде взаимно подпружиненных и взаимно перпендикулярных ползуна и клина, образутбщих самотормозящую Клиновую пару, при этом клин свободным торцом взаимоце 15сгвует с рычагом..
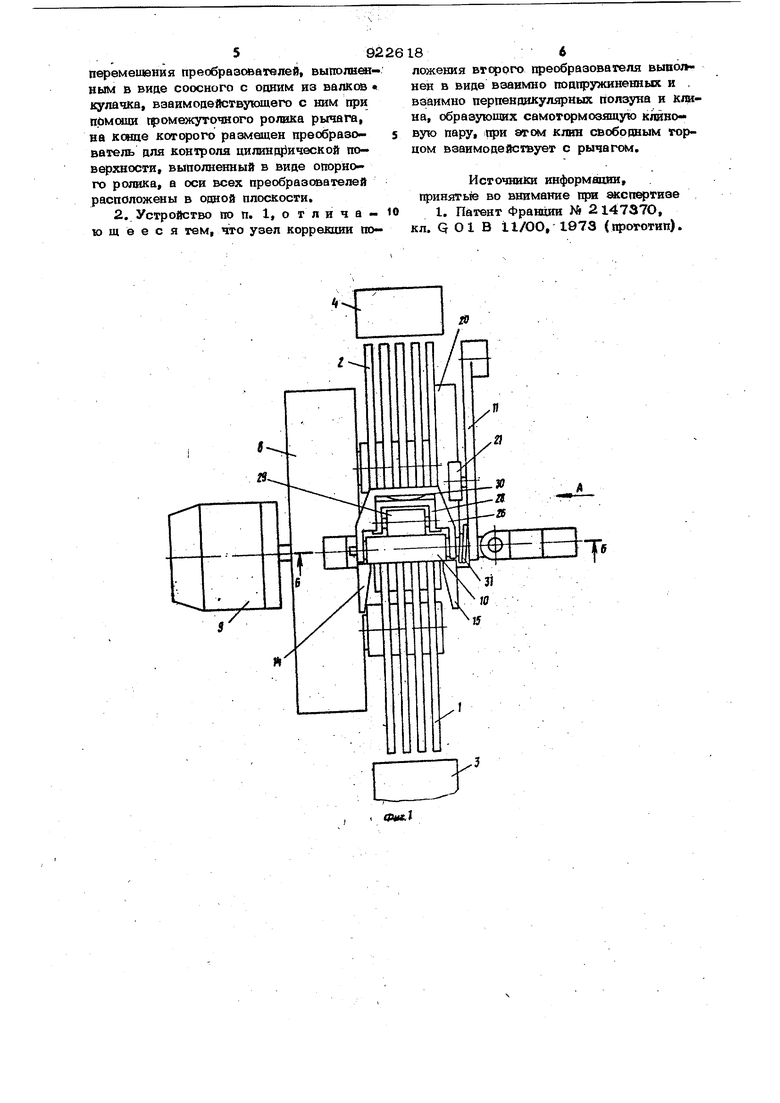
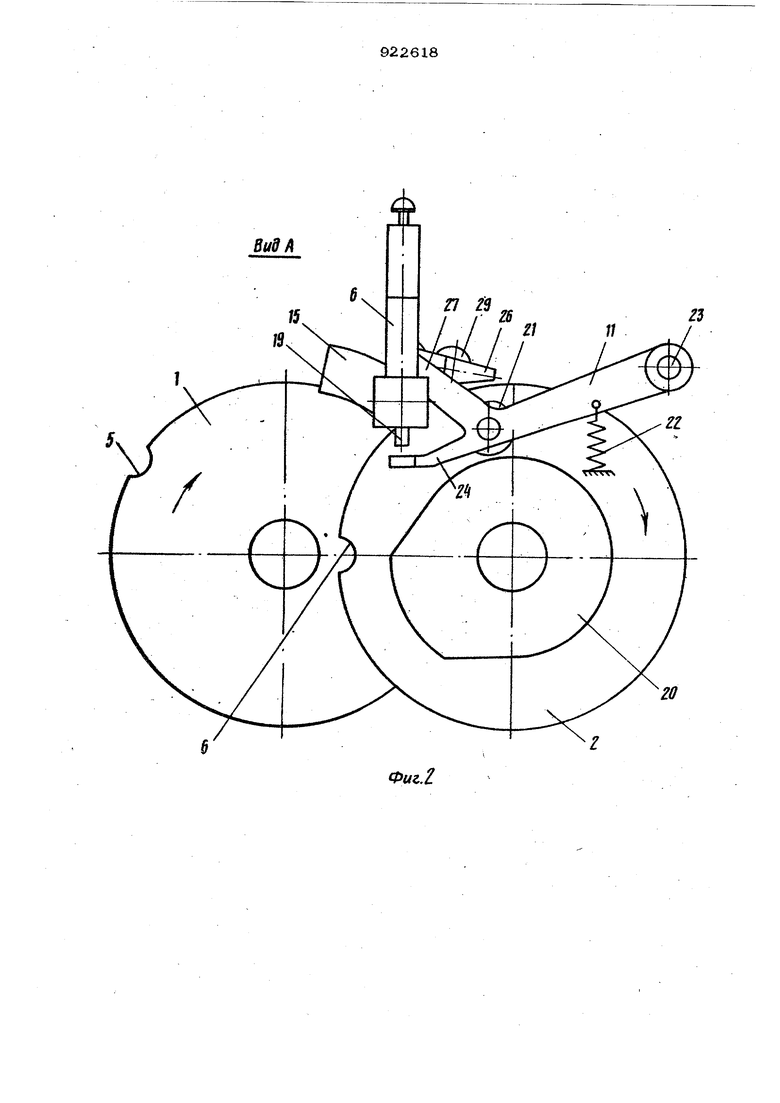
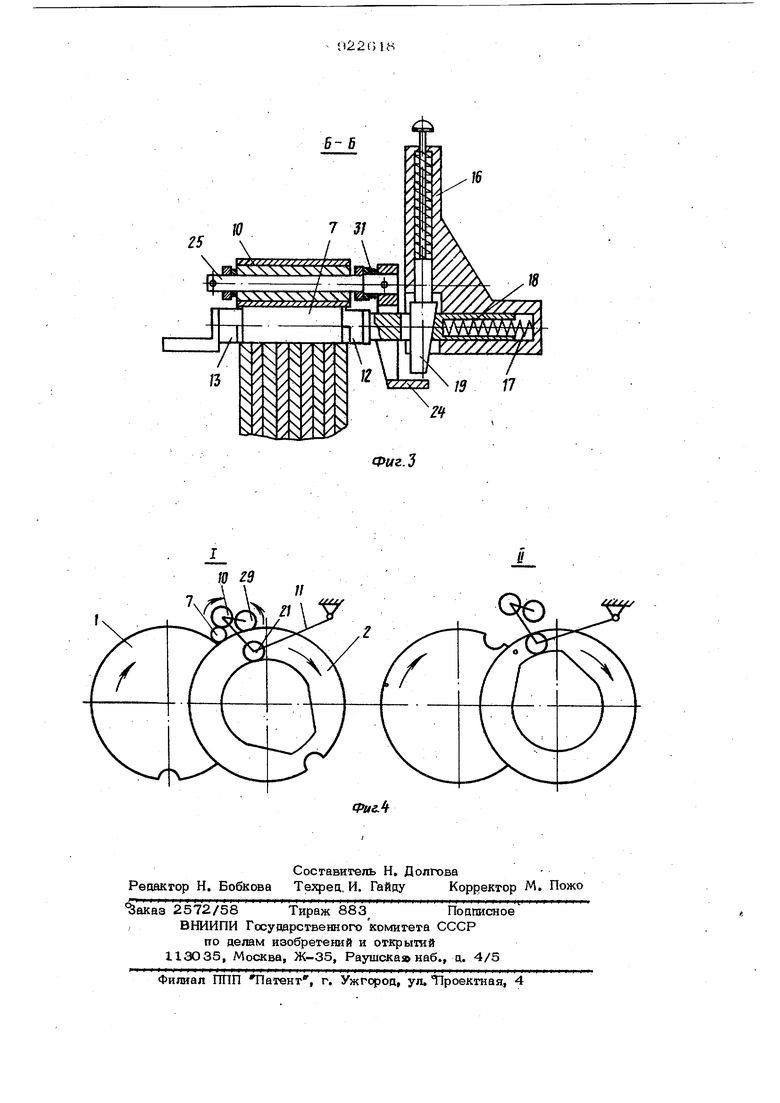
На 4иг. I представлен обший вид ycs ройства, вид сверху; на фиг. 2 - вид на фиг, 1; на фиг, 3 - разрез Б-Б на фиг. 1; на фиг. 4 - цикл положений
20 механизма перемещения преобразователей.
ycTpojfeTBO содержит два транспортирующих валка 1 и 2,. размещенных .39 межцу пигателем 3 и бункером 4с соргарутощей заслонкой (не указана). Валки I и 2 выполнены в виде |ia6opa дисков с пазами 5 и 6 для изделия 7 и через редуктор 8 связаны с электродвигагелем 9. Г зеобразовагель 10 для контроля цилиндрической поверхносте изделия 7 выполнен в виде опорного ролика и раэмещен. на конце рычага 11 механизма перемещения преобразователей 1О и 12, оси которых размещены в одной плоскости с преобразователем 13. По обе стороны валка 1 установлены приемные конусы 14 и 15 для обеспечения входа в позицию контроля изделий равличной длины, а расстояние между ними выбрано меньшим минимальной длины изделия. Преобразователи 12 и 13 размещены соосно по обе стороны впадины, образуемой боковыми поверхностями валков I и 2 и предназначены для кситроля торцовых поверхностей изделия 7. Преобразователь 13 и конус 14 установлены неподвижно, а феобразователь 12 и конус 15 закреплены на узле коррекции ег положения, выполненном в виде взаимно подпружиненных пружинами 16 и 17 и взаимно перпендикулярных ползуна 18 и клина 19, образующих самотормозяшую клиновую пару-. Механизм перемещения преобразователей выполнен в виде соосного с валком 2 кулачка 20 и взаимодействующего с ним посредством промежуточного ролика 21, подпружиненного пружиной 22 рычага 11, закрепленного на оси-23. Клин 19 свобош1ым торцом взаимодействует с плечом 24 рычага 11. Преобразовател 1О установлен на оси 25, на которой с возможностью поворота устанежлена скоба 26, а ось 25 за феплена на плече 27 рычага 11. В скобе 26 шарнирно закреп лена вилка 28, в которой с возможность вращения установлен дополнительный ролик 29, плоской пружиной 30 прижатый преобразователю ДО. Скоба 26 пружиной 31 кручения noptпружинена относительно рычага 11, а по ворот ее ограничен ytioj pM. Вдоль траектории перемещения изделия по обе сто ронычвалков установлены ограждения. Устройство работает следующим образом. Валки 1 и 2 вращаются непрерывно в 9ДНОМ направлении от электродвигателя 9 Ориентированное в питателе 3 изделие 7 ПОЩ1УЧНО попадает в паз 5 валка 1 и транспортируется в по;здцию контроля. 184 В момент попадания изделия 7 между онусами 14 и 15, последний смещаете; при этом жестко соединенный с ним ползун 18, преодолевая сопротивление пружиы 17, смещается вдоль своей оси вмесе с преобразователем 12, а Клин 19 иксирует его положение.. При встрече изделия 7 с боковой поверхностью валка из-за, наличия скоса паза 5, изделие выскальзьюает из него и располагается во впадине между валками соосно, с тфеобразователями 12 и 13. В момент выхода изделия 7 из паза 5 рычаг 11 под действием кулачка 20 поворачивается вокруг оси 23 и вводит &о взаимодействие с валКом 2 дополнительный ролик 29. Вращающийся при этом преобразователь 10 опускается на изделие 7 и со&местно с валками 1 и 2 вращает его вокруг собственной оси, осуществляя тем самым контроль цилин фической поверхности изделия 7, а преобразователями 12 и 13 - его торцовых Ьэверхностей. После этого рычаг 11 отводит преобразователь 10 и дополнительный ролик . 29 из позиции контроля и перемещает клин 19. Освобожденный ползун 18 вместе с преобразователем 12 и конусом 15 возвращается в исходное положение. Под собственным весом изделие 7 западает в паз 6 валка 2 и транспортируется к бункеру 4 с сортирующей заслшкой. По сигналу дефектоскопа (не показан) изделие попадает в соответствующую ячейку для годных или бракованных изделий. Зфтем цикл повторяется. о Использование устройства позволяет автоматизировать, процесс контроля всех поверхностей цилиндрических изделий. Формула изобретения 1. Устройство для неразрушающего контроля поверхности цилиндрических изделий, содержащее два транспортирующих валка с пазами для изделия и преобразователь для контроля его цилинрцэической поверхности, отличающееся тем, что, с целью автоматизации контроля всех поверхностей изделия, оно снабжено двумя соосно размещенными преобразоваа елями для контроля торцовых поверхностей, один из которых установлен негЛдвижно, узлом коррекции положения вуорог феобразователя и механизмом
592
перемещения преобразователей, выпопнон- ным в виде соосного с опним из валков кулачка, вааимоаействующего с ним при пймшш фомежутрчного ролвка рычага, на кшпе которого размещен прео6разо ватель для контроля цилиндрической поверхности, выполненный в виде опорного ролика, а оси всех преобразователей расположены в одной плоскости.
ложения втфого преобразователя выполнен в виде взаимно подпружиненных и . взаимно перпенодкулярных ползуна и кщна, образующих самотормозящую клйно« вую пару, при атом клин свободным торцом взаимодействует с рычагом.
Источники информации, принять1е во внимание при экспертизе
Фи,2.
6-6
ю
18
17
Фиг. 5
