(5) УСТРОЙСТВО ДЛЯ РЕЗКИ ТРУБ
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для безотходной резки круглого проката | 1975 |
|
SU549278A1 |
| Станок для резки труб | 1983 |
|
SU1155378A1 |
| Труборезный автомат | 1982 |
|
SU1055593A1 |
| Станок для резки труб | 1987 |
|
SU1473909A1 |
| Устройство для резки викелей на кольца | 1990 |
|
SU1770136A1 |
| Устройство для резки труб | 1985 |
|
SU1328087A1 |
| Автомат для резки труб | 1982 |
|
SU1041270A1 |
| СТАНОК ДЛЯ ОДНОВРЕМЕННОЙ ПРЯМОЙ И ПРОФИЛЬНОЙ ОТРЕЗКИ МЕРНЫХ ТРУБ ДВУМЯ РЕЗАКАМИ | 1970 |
|
SU271285A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН ПРЕИМУЩЕСТВЕННО С МАЛЫМ ИНДЕКСОМ | 1990 |
|
RU2010652C1 |
| Полуавтомат для изготовления многотраверсных цилиндрических сеток типа "беличьего колеса | 1973 |
|
SU720566A1 |
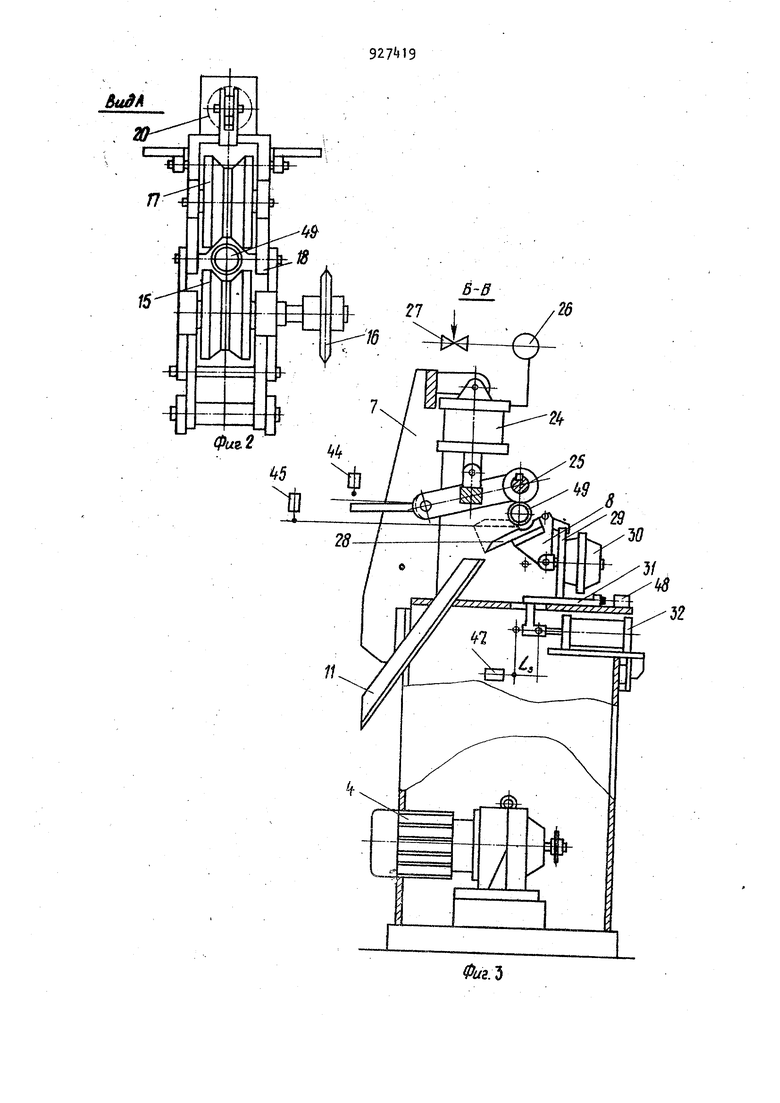
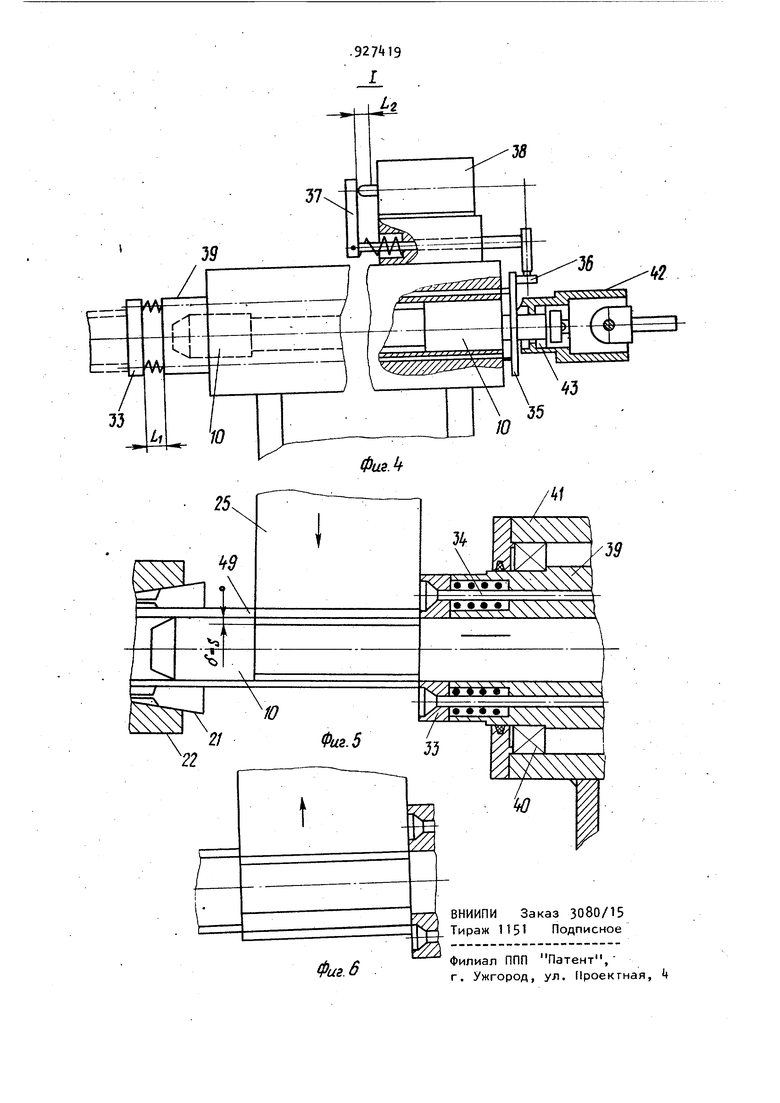
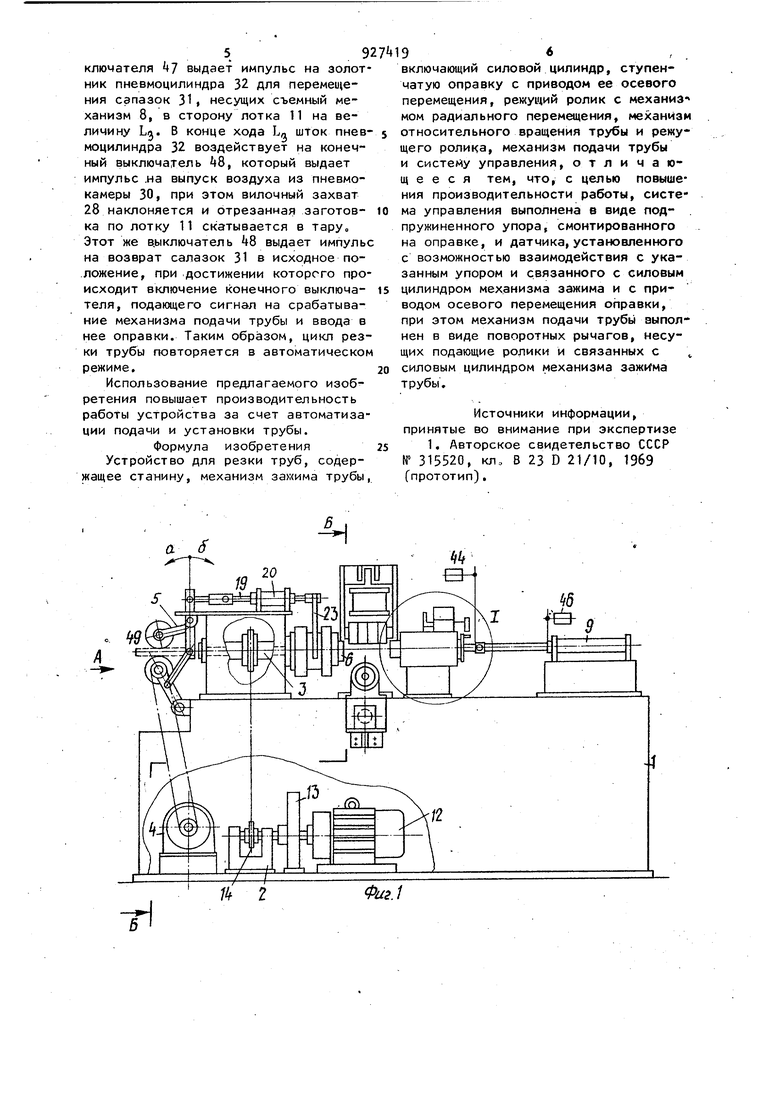
- I . Изобретение относится к обработке металлов давлением и может быть использовано в машиностроении для резк труб на мерные заготовки Известно устройство для резки тру содержащее станину, механизм зажима трубы, включающий силовой цилиндр, ступенчатую оправку с приводом ее осевого перемещения, ролик с механизмом радиального перемещения механизм относительного вращения тру бы и режущего ролика, механизм подач трубы и, систему управления 1 . Недостатком устройства для резки труб является низкая производительность его работы. Цель изобретения - повышение производительности работы за счет обеспечения возможности автоматизации установки трубы. Поставленная цель достигается тем что в устройстве для резки труб, содержащем станину, механизм зажима трубы, включающий силовой цилиндр. ступенчатую оправку с приводом ее осевого перемещения, режущий ролик с механизмом радиального перемещения, механизм относительного вращения трубы и режущего ролика, механизм пода- чи трубы и систему управления, последняя выполнена в виде подпружиненного упора, смонтированного на оправке, и датчика, установленного с возможностью взаимодействия с указанным упором и связанного с силовым цилиндром механизма зажима и с приводом осевого перемещения оправки, при этом механизм подачи трубы выполнен в виде поворотных рычагов, несущих ролики и связанных с силовым цилиьщром механизма зажима трубы. На фиг. 1 изображено устройство для резки труб, общий вид; на фиг. 2вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг k - узел I на фиг. 1; на фиго 5 - положение режущего инструмента перед резкой; на фиг. 6 - то же, после резки. Устройство для резки труб состоит из станины 1, на которой установлены привод 2 для вращения шпинделя 3i привод k подающего механизма 5, цанговый зажим 6, отрезной механизм 7, съемный механизм 8, пневмопривод 9 оправки 10 и лоток П. Привод 2 механизма вращения шпинделя 3 включает электродвигатель 12, тормоз t3 и цеп ную передачу 14. Привод k подающего механизма 5 состоит из ведущего роли ка 15, на оси которого закреплена приводная звездочка 16, прижимного ролики 17, системы рычагов 18, ведущее звен.0 системы рычагов соедине- но со штоком 19 пневмоцилиндра 20. Цанговый зажим 6 включает цангу 2 закрепленную на шпинделе 3 и зажимHyto втулку 22, кинематически соединенную с аилкой 23, установленную на противоположном конце штока 19 Отрезной механизм 7 состоит из пневмоцилиндра 2Ц, соединенного с иарнирно закрепленным к кронштейну режущим роликом 25, манометра 26 и редукционного клапана 27. Съемный механизм 8 включает вилочный захват 28, шарнирно скрепленный со стойкой 29 и штоком пнёвмокамеры 30, причем стойка 29-установлена на салазках 31, соединенных со штоком пневб оцилиндра 32. Пневмопривод 9 оправки 10 состоит из подпружиненного упора 33 соединен ного стяжками Зг с диском 35, в свою очередь кинематически соединенным с роликом Зб,установленным на подпружиненных стержнях 37 и взаимодействующим с конечным включателем 38о Оправка 10 установлена во втулке 39, закрепленной при помощи подшипников качения 40 в корпусе 41 и соединена муфтой 42, снабженной подшипником качения 43, со штком пневмоцилиндра 9. Система управления устройства содержит также конечные выключатели 44-48 для управления пневмоцилиндрами 24/ 9, 32 и механизмом 5 подачи трубы 49. Устройство для резки труб работае следующим образоМо Подлежащую резке трубу 49 встав ляют в полость шпинделя 3 и кнопкой на пульте, управления включают привод 4 подающего механизма 5 при этом одновременно подается импульс на пневмоцилиндр 20, шток 19 которого перемедается по стрелке d, система 9 9 рычагов 18 поднимает ведущий ролик 15 вверх, а прижимной ролик 17 опускает вниз Ролики сжимают трубу и .подэгот еб вдоль оси шпинделя 3 до упора 33. При этом пружины стямек 3 под воздействием торца трубы сжимаются и упор 33 перемещается на расстояние L, на это же расстояние перемещается диск 35, отодвигая ролик 36 и скрепленные с ним стержни 37 На расстояние LQ, в результате конечный выключатель 38 в оп|:(еделенной последовательности выдает импульсы: на пневмоцилиндр 9 для ввода оправки 10 внутрь трубы 49; на пи вмоцилиндр 20 для перемещения тока 19 по стрел- . ке 6 , при этом вилка 23 передвигает втулку 22 и цанга 21 зажимает установленную трубу, 1охватывая. на зажимной ступени оправки 10; а ролики 15 и 17 отходят от трубы; на включение привода 2 для вращения шпинделя 3. Как только оправка 10 займет рабочее положение, шток пневмоцилиндра 9 посредством конечного выключателя 44 включает пневмоцилиндр 24, сообщающий ролику 25 перемещение в радиальном направлении к оси трубы. Войдя в контакт с трубой 49 ролик 25 за счет сил трения вовлекается во вращение вокруг своей оси и начинает постепенно внедряться в ее стенки. За счет взаимного перемещения режущих кромок ролика 25 и оправки 10 происходит сдвиг отрезаемой части трубы, завершающийся разделением. При достижении между поверхностями ролика 25 и калибрующей ступени оправки 10 заданного радиального зазора, равного, например, толщине стенки разрезаемой трубы, конечный выключатель 45 переключает золотник пневмоцилиндра 24 на обратный ход и одновременно выдает импульс на включение пневмокамеры 30, перемещение штока, который поворачивает съемный механизм 8 из исходного положения (показан пунктиром) в рабочее положение. При этом отрезанная заготовка фиксируется в желобе вилочного захвата 28 и поднимается дляустановки в соосное положение с трубой 49, после чего конечный выключатель 46 выдает импульс на пневмоцилиндр 9 для отвода оправки 10 из рабочего положения в исходное, т.е. внутрь втулки 39. При достижении штока пневмоцилиндра 9 крайнего положения поводок (не показан) посредством конечного выключателя 7 выдает импульс на золот ник пневмоцилиндра 32 для перемещения сэпазок 31I несущих съемный механизм 8, в сторону лотка 11 на величину Ц. В конце хода L шток пнев моцилиндра 32 воздействует на конечный выключатель 8, который выдает импульс .на выпуск воздуха из пневмокамеры 30, при этом вилочный захват 28 наклоняется и отрезанная заготовка по лотку 11 скатывается в тару. Этот же выключатель 8 выдает импуль на возврат салазок 31 в исходное по.ложение, при достижении которого про исходит включение конечного выключателя, подающего сигнал на срабатывание механизма подачи трубы и ввода в нее оправки. Таким образом, цикл резки трубы повторяется в автоматическом режиме. Использование предлагаемого изобретения повышает производительность paбotы устройства за счет автоматизации подачи и установки трубы. Формула изобретения Устройство для резки труб, содержащее стамину, механизм зажима трубы а 9 6 9 включающий силовой цилиндр, ступенчатую оправку с приводом ее осевого перемещения, режущий ролик с механиз мом радиального перемещения, механизм относительного вращения трубы и режущего ролика, механизм подачи трубы и систему управления, отличающееся тем, что, с целью повыше ния производительности работы, система управления выполнена в виде подпружиненного упора, смонтированного на оправке, и датчика, установленного с возможностью взаимодействия с указанным упором и связанного с силовым цилиндром механизма зажима и с приводом осевого перемещения оправки, при этом механизм подачи трубЫ выполнен в виде поворотных рычагов, несущих подающие ролики и связанных с силовым цилиндром механизма aamkfMa трубы. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 315520, кл„ В 23 D 21/10, 19б9 (прототип). Ю-. J 2
