1
Изобретение относится к грузоэа- хватным устройствам, предназначенным преимущественно для захвата штучных грузов.
Цель изобретения - повышение надежности работы устройства.
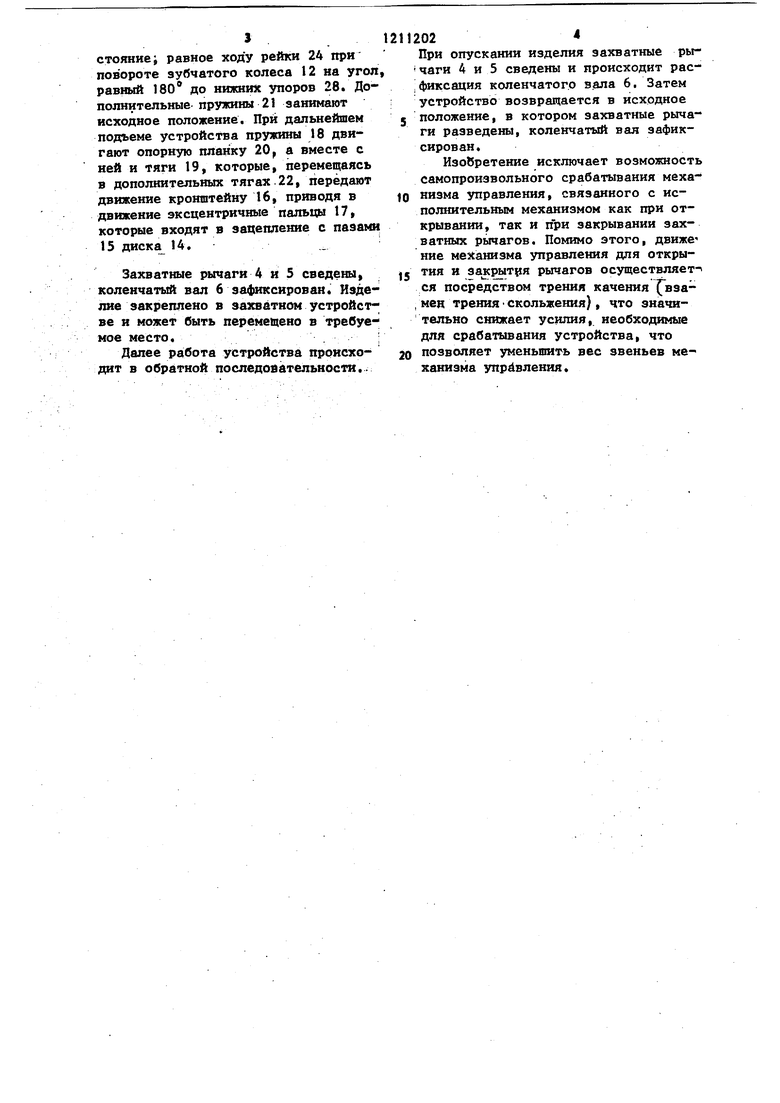
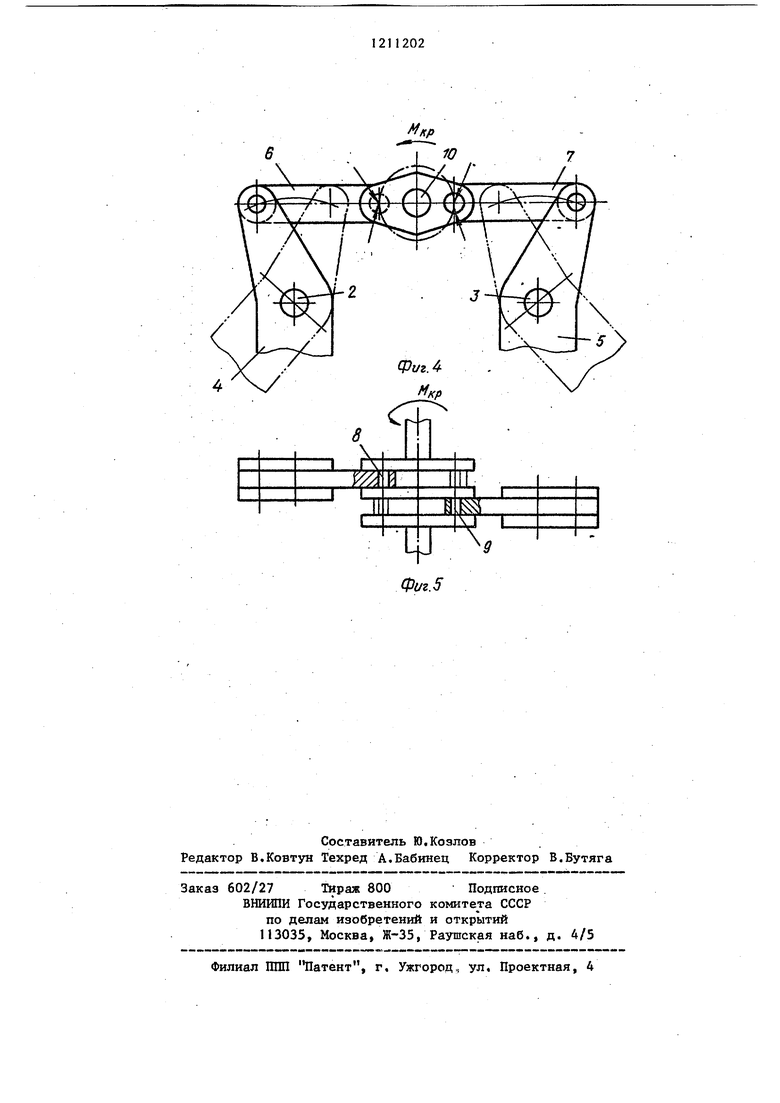
На фиг.1 схематически изображено устройство, общий вид; на фиг,2 - разрез А-А на фиг.1; на фиг.3 - разрез Б-В на фиг., на фиг.4 - схема работы устройства, вид сбоку; на фиг.5 - то же, вид сверху.
Захватное устроййтгао для штучных грузов содержит несущую раму 1, в которой на осях 2 и 3 шарнирно установлены захватные двуплечие рычаги 4 и 5. Механизмы управления захватными двуплечими рычагами представляют собой коленчатый вал 6, установленный в подшипниках 7, закреплен- ных на раме 1. На коленах 8 и 9 ко- ленчатого вала 6 установлены шатуны 10 и 11, шарнирно соединенные с пле- соответствующего захватного рычага 4 и 5. На коленчатом валу 6 установлены зубчатое колесо 12 и механизм 13 передачи крутящего момента в одном направлении. Предохранительное устройство включает в себя установленный на коленчатом валу 6 с возможностью поворота на 180 в вертикальной плоскости диск 14с двумя парами сквозных диаметрально противо положньпс пазов 15 на. его наружной поверхности, кронштейн 16 с закрепленными на нем эксцентричньми пальцами
17для взаимодействия с пазами 15 диска 14, подпружиненные пружинами
18тяги 19, закрепленные не несущем элементе 1 и соединенные с кронштейном 16 и опорной планкой 20.
Устройство снабжено связанными с коленчатым валом 6 и установленными на несущем элементе 1 подпружиненными дополнительными пружинами 21, дополнительными тягами 22, соединен- ньми между собой дополнительной опорной планкой 23 и закрепленной на одной из них зубчатой рейкой 24, взаимодействующей с зубчатым колесом 12
На раме 1 закреплены направляющие 25, а на тягах 22 установлены роли 26, взаимодействукнцие с направляющими, на раме 1 закреплены верхние 27 и нижние 28 упоры.
Захватное устройство для штучных грузов работает следующим образом.
112021
В исходном положении захватные рычаги 4 и 5 разведены, устройство установлено над изделием. Опорные планки 20 и 23 находятся вьш1е изде- 5 ЛИЯ. Колена 8 и 9 коленчатого вала 6 находятся в крайнем правом и соответственно крайнем левом положениях. Коленчатьтй вал 6 зафиксирован эксцентричными пальцами 17. 10 В рабочем положении устройство опускают на изделие. Опорная планка 20 упирается в наружную поверхность изделия и начинает двигаться вверх до взаимодействия с дополнительной 15 опорной планЛой 23, сжимая пружину 18. При этом связанные с опорной планкой 20 тяги 19 поднимаются в дополнительных тягах 22 и перемещают кронштейн 16, укрепленный на этих 20 дополнительных тягах, вьгоодя эксцентричные пальцы 17 из пазов 15 диска 14. Происходит расфиксация коленчатого вала 6.
При дальнейшем опускании устрой- 25 ства направляющие 25 перемещаются вместе с рамой 1 относительно дополнительных тяг 22 и роликов 26, сжимая допрлнительную пружину 21 до верхнего упора 27, при этом зубчатое 30 колесо 12, установленное на коленчатом валу 6, обкатываясь по рейке 24, соединенной с тягой 22, поворачивает коленчатый вал 6 через механизм 13 передачи крутящего момента в одном 2J направлении, роль которого может вы- полнять обгонная муфта или храповый механизм, на угол, равный , а колена 8 и 9 коленчатого вала 6 поворачиваются на 180 по окружности, 4Q занимая при .этом крайнее левое и соответственно крайнее правое положение.
В результате поворота колен 8 и 9 коленчатого вала 6 приводятся в дви- 45 жение шатуны 10 и 11, которые поворачивают захватные рычаги 4 и 5 относительно осей 2 и 3, закрывая их. При этом рычаги 4 и 5 опущены ниже изделия на расстояние, равное ходу пру50
жин 18 и 21.
При подъеме устройства зубчатое колесо 12, обкатываясь по рейке 24 и взаимодействуя с механизмом 13, не передает крутящий момент на колен- 55 чатый вал 6, т.е. проворачивается относительно него, а направляющие 25 перемещаются относительно дополнительных тяг 22 и роликов 26 на расстояниеj равное ходу рейки 24 при повороте зубчатого колеса 12 на угол равный 180 до нижних упоров 28. Дополнительные- пружины 21 занимают исходное положение. При дапьнейшем подъеме устройства пружины 18 двигают опорную планку 20, а вместе с ней и тяги 19, которые, перемещаясь в дополнительных тягах 22, передают движение кронштейну 16, приводя в движение эксцентричные пальцы 17, которые входят в зацепление с пазами 15 диска 14.
Захватные рычаги 4 и 5 сведены, коленчатый вал б зафиксирован. Изделие закреплено в захватном устройстве и может быть перемещено в требуе мое место.
Далее работа устройства происходит в обратной последовательности.
211202
При опускании изделия захватные ры- чаги 4 и 5 сведены и происходит рас- ,фиксация коленчатого вала 6, Затем устройство возвращается в исходное
J положение, в котором захватные рычаги разведены, коленчатый вал зафиксирован.
Изобретение исключает возможность самопроизвольного срабатывания мехаtO низма управления, связанного с исполнительным механизмом как при открывании, так и п ри закрывании захватных рычагов. Помимо этого, движе ние механизма управления для открыfj тия и эaJкpытtIя рычагов осуществляет- ся посредством трения качения вза- ,мед трения скольжения), что значительно снижает усилия, необходимые для срабатывания устройства, что
20 позволяет уменьшить вес звеньев механизма управления.
Фиг. 1
r У
::i /
(Риг. 2.
ff-ff
Фиг.З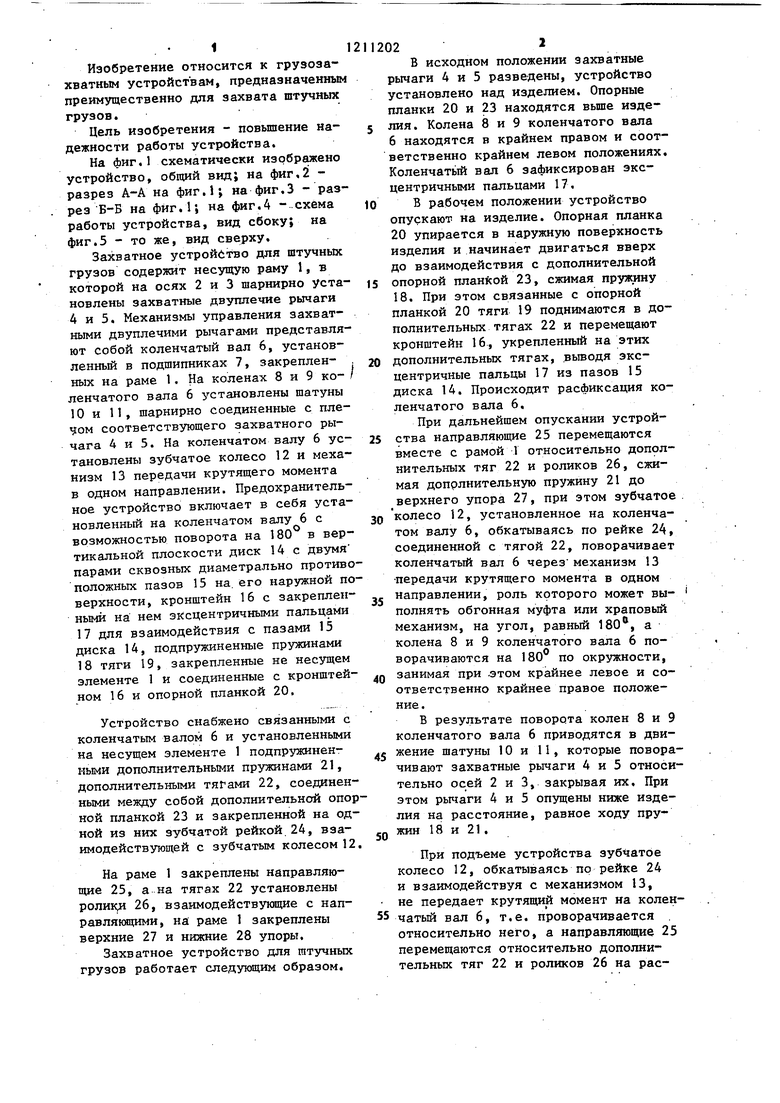
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1985 |
|
SU1353714A1 |
| Захватное устройство для штучных грузов | 1980 |
|
SU927716A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для захвата слоя штучных изделий | 1986 |
|
SU1382803A1 |
| Устройство для перегрузки изделий | 1989 |
|
SU1691231A1 |
| Устройство для комплектования пакета дисковых заготовок с технологическими прокладками | 1977 |
|
SU738821A1 |
| Устройство для двусторонней гибки труб | 1991 |
|
SU1797507A3 |
| Устройство для измерения работы дизельных двигателей | 1988 |
|
SU1509642A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Г. М. РЫБКИН и В. Т. ЧиликовВсесоюзный научно-исследовательский инструментальный институт | 1970 |
|
SU282010A1 |

Фиг.5
| Захватное устройство для грузов,СНАбжЕННыХ цАпфАМи | 1976 |
|
SU844546A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
