Изобретение относится к машиностроению и предназначено для усовершенствования манипуляторов, используемых для механизации и автоматизации основных и вспомогательных операций в промышленности,
Цель изобретения - повышение надежности за счет обеспечения автоматического уравновешивания звеньев манипулятора.
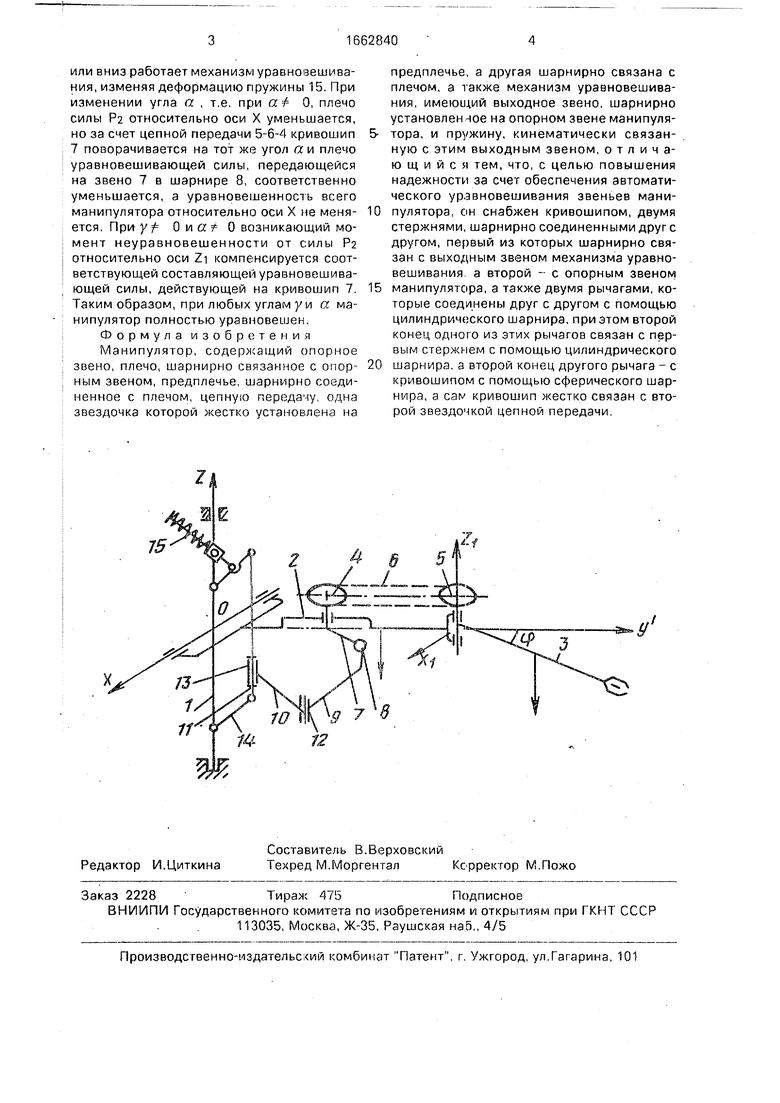
На чертеже представлен манипулятор, общий вид.
Манипулятор содержит последовательно шарнирно соединенные с опорным звеном 1 звенья 2 и 3 плеча и предплечья. Ось шарнира, соединяющего звенья 2 и 3, перпендикулярна горизонтальной оси шарнира, соединяющего звено 2 со звеном 1. На звене 2 с возможностью вращения установлена звездочка 4 цепной передачи, а на оси шарнира, соединяющего звенья 2 и 3, установлена звездочка 5, жестко соединенная со звеном 3. Звездочки 4 и 5 одного и того же радиуса соединены цепью 6, их оси перпендикулярны плоскости ХУ На ось звездочки 4 жестко посажен кривошип 7, перпендикулярный оси звездочки, соединенный сферическим шарниром 8 с Г-образным выходным рычагом 9 Рычаги 9 и 10 соединены между собой и с вертикальным стержнем 11 параллелограмма механизма уравновешивания шарнирами 12, 13 с вертикальными осями вращения Сам стержень 11 шарнирно соединен со стержнем 14, параллельным выходному звену механизма уравновешивания связанному с пружиной 15
Манипулятор работает следующим образом.N
Когда а 0, кривошип 7 параллелен звену 3 и при перемещении звеньев 2 и 3 вверх
О
о
N) 00
ГЬь
О
или вниз работает механизм уравновешивания, изменяя деформацию пружины 15. При изменении угла а , т.е. при а+ 0, плечо силы Р2 относительно оси X уменьшается, но за счет цепной передачи 5-6-4 кривошип 7 поворачивается на тот же угол а и плечо уравновешивающей силы, передающейся на звено 7 в шарнире 8, соответственно уменьшается, а уравновешенность всего манипулятора относительно оси X не меняется. При у f 0 и а р 0 возникающий момент неуравновешенности от силы Р2 относительно оси Zi компенсируется соответствующей составляющей уравновешивающей силы, действующей на кривошип 7. Таким образом, при любых углам у и а манипулятор полностью уравновешен. Формула изобретения Манипулятор, содержащий опорное звено, плечо, шарнирно связанное с опор ным звеном, предплечье, шарнирно соединенное с плечом, цепную передачу, одна звездочка которой жестко установлена на
-
предплечье, а другая шарнирно связана с плечом, а также механизм уравновешивания, имеющий выходное звено, шарнирно установленное на опорном звене манипуля5- тора, и пружину, кинематически связанную с этим выходным звеном, отличающийся тем, что, с целью повышения надежности за счет обеспечения автоматического уравновешивания звеньев мани10 пулятора, он снабжен кривошипом, двумя стержнями, шарнирно соединенными друг с другом, первый из которых шарнирно связан с выходным звеном механизма уравновешивания, а второй - с опорным звеном
15 манипулятора, а также двумя рычагами, которые соединены друг с другом с помощью цилиндрического шарнира, при этом второй конец одного из этих рычагов связан с первым стержнем с помощью цилиндрического 20 шарнира, а второй конец другого рычага - с кривошипом с помощью сферического шарнира, а сам кривошип жестко связан с второй звездочкой цепной передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU929430A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
| Сбалансированный манипулятор | 1986 |
|
SU1379105A1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| Механизм локтевого шарнира | 1982 |
|
SU1024080A1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
Изобретение относится к машиностроению и предназначено для усовершенствования манипуляторов, используемых для механизации и автоматизации основных и вспомогательных операций в промышленности. Цель изобретения - повышение надежности за счет обеспечения автоматического уравновешивания звеньев манипулятора. Ось шарнира, соединяющего звенья 2 и 3, перпендикулярна горизонтальной оси шарнира, соединяющего звено 2 со звеном 1. На ось звездочки 4, установленной на звене 2, жестко посажен кривошип 7, перпендикулярный оси звездочки, соединенный сферическим шарниром 8 с Г-образным выходным рычагом 9. Рычаги 9 и 10 соединены между собой и с вертикальным стержнем 11 параллелограмма механизма уравновешивания шарнирами 12, 13 с вертикальными осями вращениями. Стержень 11 шарнирно соединен со стержнем 14, параллельным выходному звену механизма уравновешивания, связанному с пружиной 15. 1 ил.
П72
z,
з
.у1
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| О.Ф.Тищенко | |||
| М.: Высш | |||
| школа, 1982, с | |||
| Счетная таблица | 1919 |
|
SU104A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
