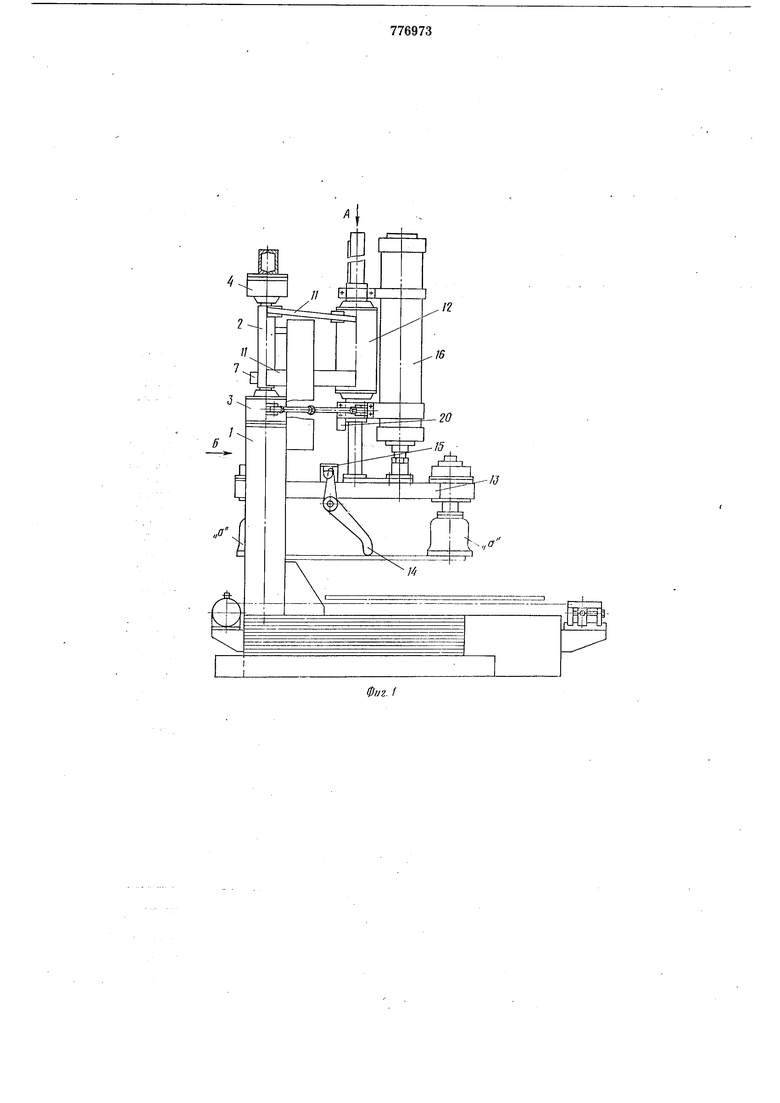
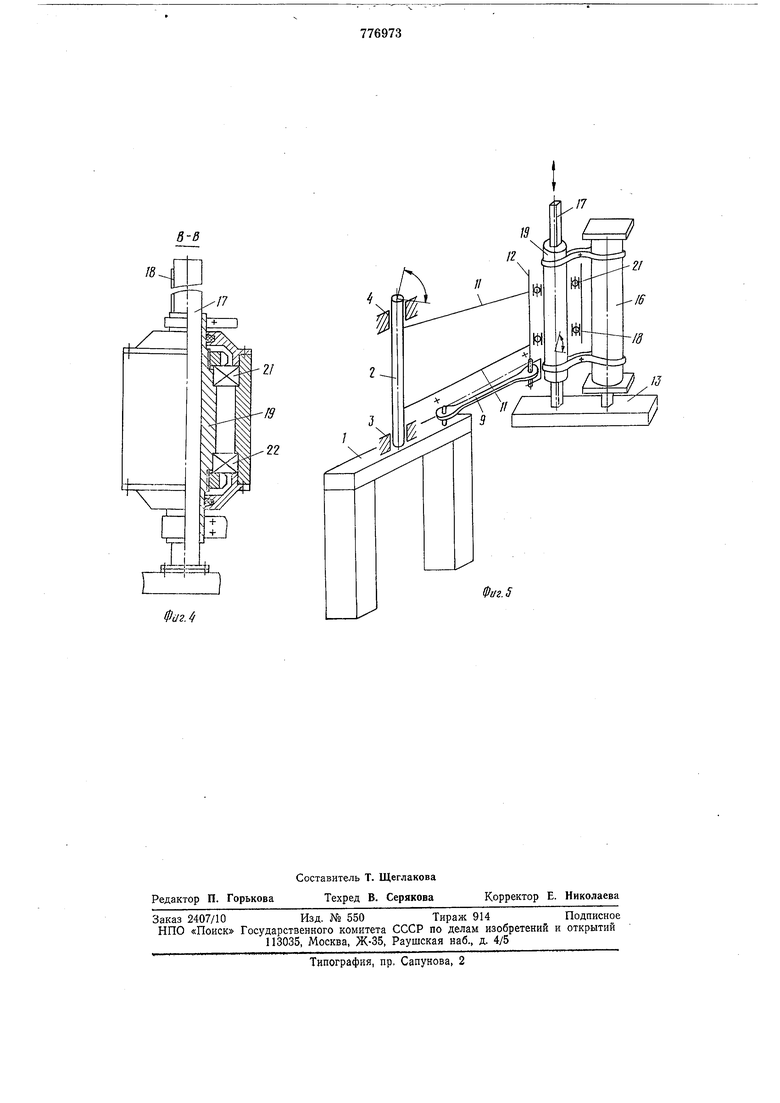
на фиг. 1; на фиг. 4 - разрез по В-В фиг. 2; на фиг. 5 - принципиальная схема устройства.
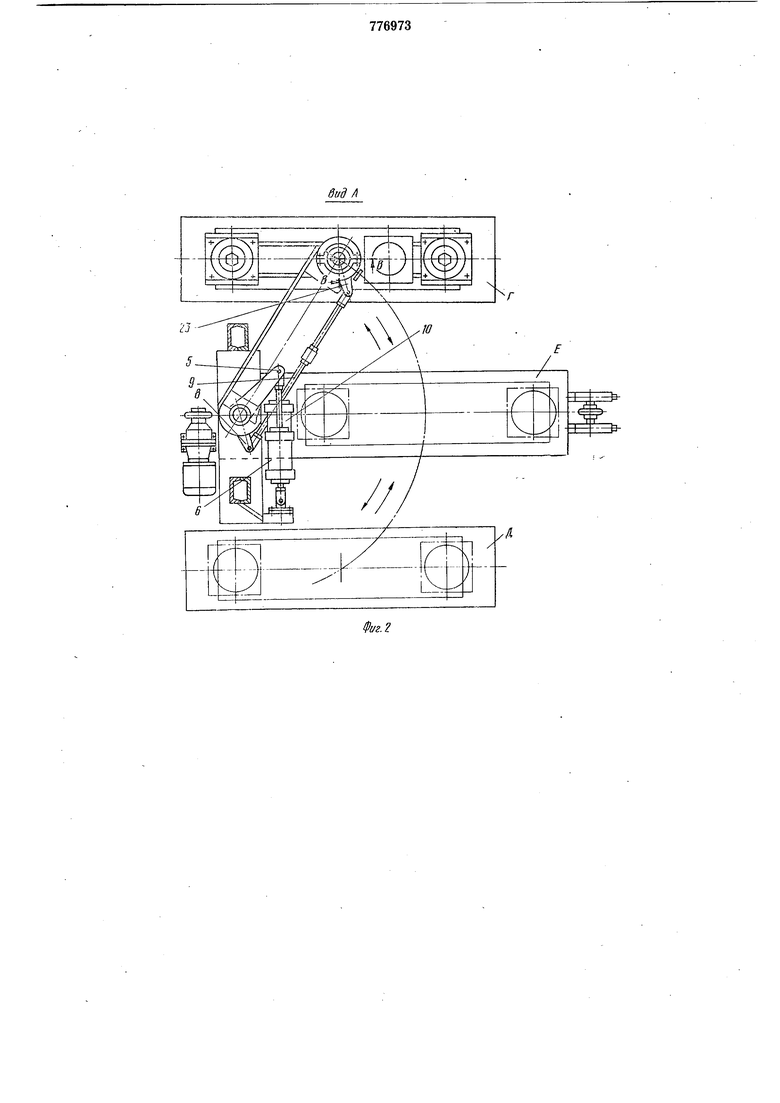
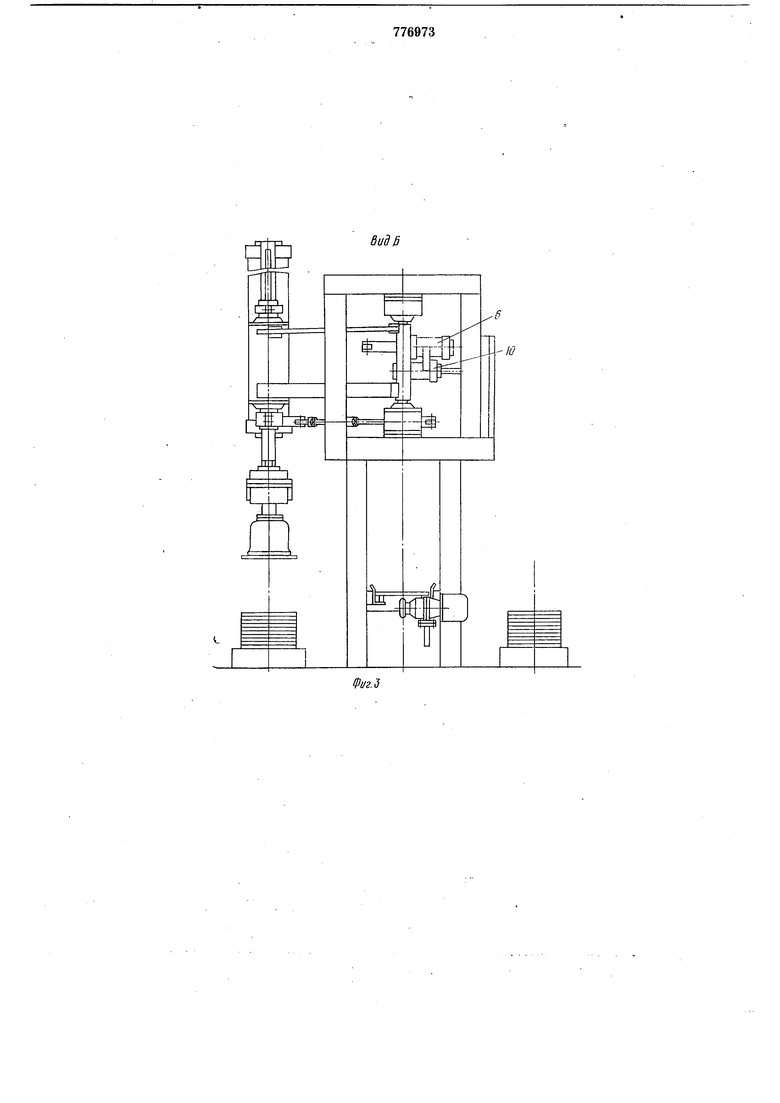
Устройство для захвата и передачи изделий с одного конвейера на другой содержит опорную раму 1 портального типа с изменяемой по высоте и ширине просветом портала, привод поворота с осью 2, установленной в подшипниковых опорах 3 и 4 и выполненную заодно с выступом 5 для соединения с силовым цилиндром 6 привода поворота. На оси 2 установлен датчик 7 ограничения угла поворота стрелы. На корпусе опоры 3 выполнен кронштейн с шейкой, на которой с помош,ью клеммного зажима закреплен рычаг 8 для крепления одной части механизма ориентации 9. Привод поворота имеет силовые цилиндры 6 и 10, корпуса которых соединены между собой так, что корпус и шток одного из них служит продолжением другого, причем шток одного из цилиндров закреплен в опорной раме 1, а шток другого соединен с выступом 5. Стрела 11 одним концом жестко закреплена на оси 2, а другим - на корпусе шарнирного механизма 12, соединенным с траверсой 13 со сменными захватами (магниты, пневмоприсоски и т. д.). Механизм подъема имеет шуп 14 датчика 15 и выполнен в виде силового цилиндра 16, укрепленного на корпусе шарнирного механизма 12, шарнирный механизм выполнен в виде жестко закрепленного нижним концом на траверсе 13 ползуна 17 с продольным шлицевым выступом 18, с помощью которого ползун скользит по соответствующему шлицевому пазу поворотной втулки 19. Датчик 20 управляет опаренными силовыми цилиндрами привода поворота. При этом поворотная втулка 19 установлена на подшипниковых опорах 21, 22 и имеет поворотную тягу 23 для шарнирного крепления второй части механизма ориентации 9, которая соединяется с первой частью с помощью сгонной муфты.
Устройство для захвата и передачи изделий с одного конвейера на другой работает следующим образом.
При передаче изделий с конвейеров Г и Д на конвейер Е, или наоборот, включается реле воздухораспределителя, и сжатый воздух поступает в верхнюю полость силового цилиндра 16. При этом траверса с захватом и щупом 14 датчика 15 опускается до соприкосновения захвата щупа с изделием. При этом щуп подает сигнал на захват для захвата изделий и на механизм подъема для поднятия траверсы с изделием. Подъем траверсы ограничен датчиком 20, подающим сигнал на привод поворота стрелы 11 в виде консольной рамы, в результате чего стрела с траверсой начинает поворачиваться, Во время поворота механизм ориентации обеспечивает необходимое положение траверсы путем изменения углов в параллелограмме, образованном стрелой, тягой, рычагом и двумя частями, соединенными сложной муфтой. Механизм ориентации регулируется путем изменения суммарной длины двух его частей с помощью клеммного зажима и сгонной муфты. При этом через тягу 23 поворачивают втулку 19, которая, в
свОю очередь, через ползун поворачивает траверсу с захватом. После поворота стрелы 11 до положения выгрузки датчик 7 дает сигнал на опускание траверсы, освобождение изделия от захвата и на возвращение
траверсы для повторения цикла.
При передачи изделий с конвейера Г на конвейер Е, или наоборот, а также от конвейера Д к конвейеру Е, или наоборот, работают по очереди соответственно силовые
цилиндры 6 и 10 при выдвинутом штоке и при втянутом.
При передаче изделий от конвейера Г к конвейеру Д, или наоборот, длина хода привода поворота увеличивается за счет спарепных силовых цилиндров 6 и 10.
... , Ф ор му.л а- изо бретени я- 1. Устройство для захвата и передачи изделий между конвейерами, включающее
траверсу с захвато:м, механизм подъема, шарнирный механизм в виде втулки с пазом и ползуна с выступом, опорную раму с приводом поворота и осью, на которой установлена стрела, соединенная с траверсой
через ползун, отличающееся тем, что, с целью повышения производительности путем обеспечения постоянной ориентации траверсы, оно снабжено механизмом ориентации, выполненным из двух частей, соединенных муфтой, рычага и тяги, причем одна часть расположена на рычаге, который с помощью клеммного зажима закреплен на опорной раме, а другая шарнирно закреплена на тяге, которая соединена с втулкой,
причем последняя установлена с возможностью поворота.
2.Устройство по п. 1, от л и ч а ющееся тем, что привод поворота выполнен в виде двух силовых цилиндров, корпуса которых
соединены между собой, причем штОк одного из них жестко закреплен на опорной раме, а другого - на оси.
3.Устройство по п. 1-2, отличающеес я тем, что механизм подъема выполнен в
виде СИЛОВОГОцилиндра, установленного с возможностью поворота. :
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 132986, кл. В 65G 47/86, 21.08.59.
2.Авторское свидетельство СССР № 573419, кл. В 65G 47/52, 04.07.73.
в ид б
| название | год | авторы | номер документа |
|---|---|---|---|
| Консольный кран | 1979 |
|
SU929534A1 |
| Устройство для автоматической ориентациишиН | 1979 |
|
SU835907A1 |
| Пакетоформирующая машина для штучных грузов | 1972 |
|
SU554196A1 |
| Устройство для формирования слоя прямоугольных изделий | 1986 |
|
SU1500589A1 |
| Установка для перегрузки штучных грузов | 1989 |
|
SU1775338A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Устройство для завинчивания и отвинчивания элементов промежуточного крепления рельсового звена | 1985 |
|
SU1268653A1 |
| Устройство для отделения листовых заготовок от стопы | 1980 |
|
SU978987A1 |
| Устройство для перекладки изделий | 1980 |
|
SU893805A2 |
Tuf:
т
ю
т;
18
Фаг. 4
