Изобретение относится к машиностроению, а именно к промышленным роботам с цикловым управлением и предназначено для захвата и ориентации дета- лей-заготовок относительно технологического оборудования, а также для их переноса в разные точки обслуживаемого пространства.
Цель изобретения - расширение техНологических возможностей за счет Увеличения числа регулируемых точек позиционирования.
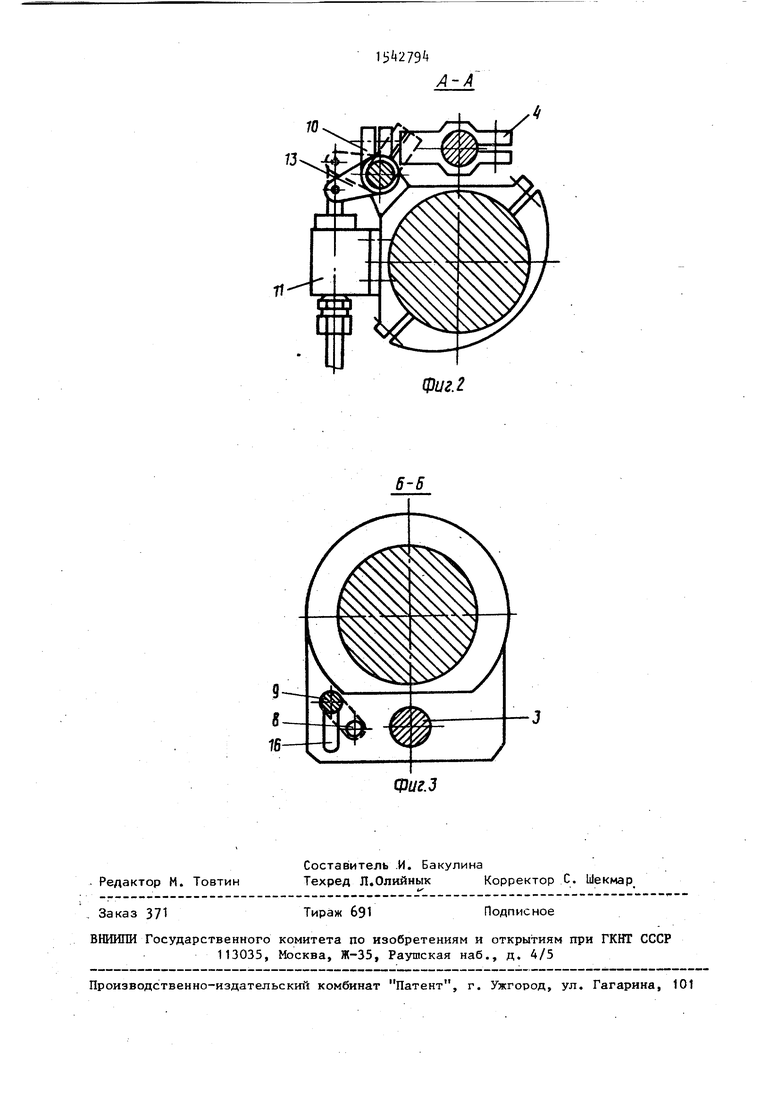
На фиг. 1 изображена рука промыш- |1енного робота, общий вид; нафиг, 2 - (эазрез А-А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 1.
Рука промышленного робота состоит Из несущего силового цилиндра, наприДля выдвижения штока 2 руки сжатый воздух подается в полость несущего цилиндра 1. При движении руки вниз регулируемый упор k направляющей скалки 3( минуя упор 10 дополнительной скалки 9, нажимает на тормозной золотник 8 гидродемпфера 6 выдвижения руки и останавливает шток 2. При необходимости изменения хода руки или промежуточного останова необходимо подать сжатый воздух в пневмоцилиндр 11 привода поворота дополнительной скалки 9. При движении шток пневмоцилиндра 11 взаимодействует с серьгой 13, неподвижно закрепленной на скалке 9 и поворачивает скалку 9 вместе с упором 10. При движении руки вниз, регулируемый упор Ц направляющей скалки 3 нажимает на по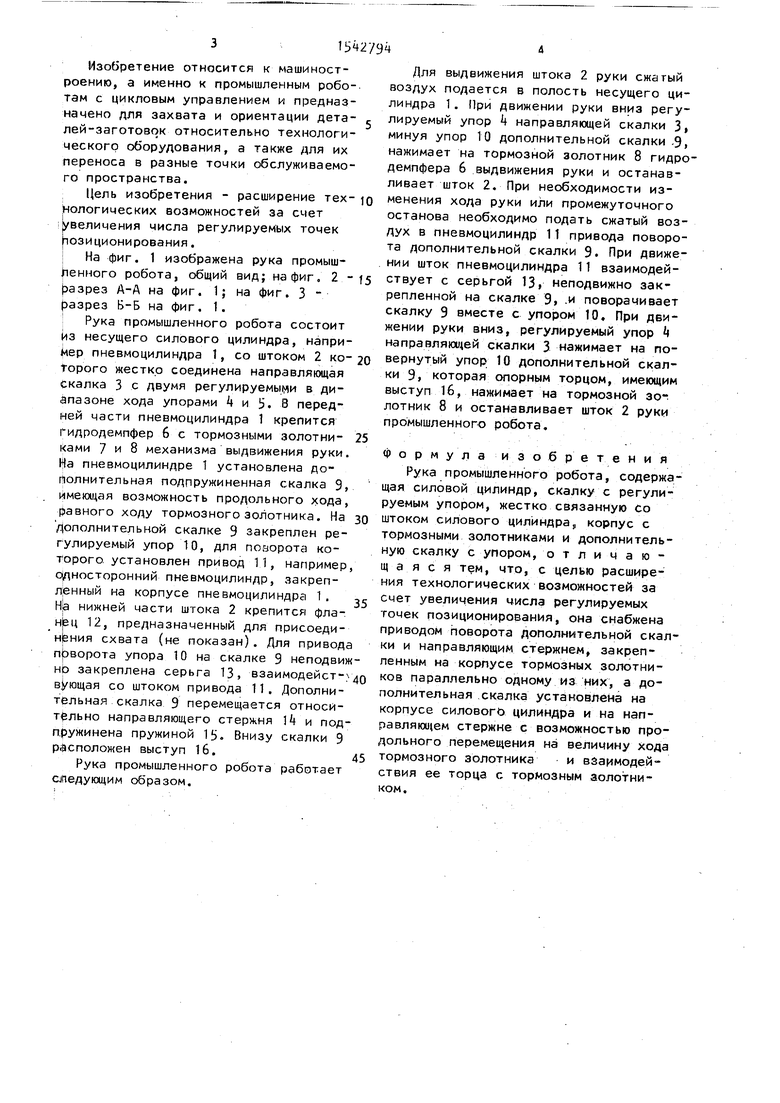
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука циклового робота | 1976 |
|
SU595143A1 |
| Рука промышленного робота | 1980 |
|
SU935262A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Промышленный робот | 1979 |
|
SU863330A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Механическая рука | 1988 |
|
SU1537531A1 |
| Промышленный робот | 1988 |
|
SU1542793A1 |
Изобретение относится к машиностроению, а именно к промышленным роботам с цикловым управлением, и предназначено для захвата и ориентации деталей-заготовок относительно технологического оборудования. Целью изобретения является расширение технологических возможностей путем увеличения числа регулируемых точек позиционирования. Для этого на пневмоцилиндре 1 установлена дополнительная подпружиненная скалка 9, имеющая возможность продольного хода, равного ходу тормозного золотника. На дополнительной скалке 9 закреплен регулируемый упор 10, для поворота которого установлен привод 11 (например, односторонний пневмоцилиндр), закрепленный на корпусе пневмоцилиндра 1. Дополнительная скалка 9 перемещается относительно направляющего стержня 14 и подпружинена пружиной 15. 3 ил.
мер пневмоцилиндра 1, со штоком 2 ко-20 вернутый упор 10 дополнительной скал- торого жестко соединена направляющая Скалка 3 с двумя регулируемыми в диапазоне хода упорами k и 5. В передней части пневмоцилиндра 1 крепится Гидродемпфер 6 с тормозными золотни- 25 ками 7 и 8 механизма выдвижения руки. Иа пневмоцилиндре 1 установлена дополнительная подпружиненная скалка 9, имеющая возможность продольного хода, равного ходу тормозного золотника. На 30 дополнительной скалке 9 закреплен регулируемый упор 10, для поворота которого установлен привод 11, например, односторонний пневмоцилиндр, закрепленный на корпусе пневмоцилиндра 1 . ,,- На нижней части штока 2 крепится флз- нЈц 12, предназначенный для присоединения схвата (не показан). Для привода поворота упора 10 на скалке 9 неподвижно закреплена серьга 13, взаимодейст- до вующая со штоком привода 11. Дополнительная скалка 9 перемещается относительно направляющего стержня И и подпружинена пружиной 15. Внизу скалки 9 расположен выступ 16.45
Рука промышленного робота работает следующим образом.
ки 9, которая опорным торцом, имеющим выступ 16, нажимает на тормозной золотник 8 и останавливает шток 2 руки промышленного робота.
Формула изобретения
Рука промышленного робота, содержащая силовой цилиндр, скалку с регулируемым упором, жестко связанную Со штоком силового цилиндра, корпус с тормозными золотниками и дополнительную скалку с упором, отличающаяся тем, что, с целью расширения технологических возможностей за счет увеличения цисла регулируемых точек позиционирования, она снабжена приводом поворота дополнительной скалки и направляющим стержнем, закрепленным на корпусе тормозных золотников параллельно одному из них, а дополнительная скалка установлена на корпусе силового цилиндра и на направляющем стержне с возможностью продольного перемещения на величину хода тормозного золотника и взаимодействия ее торца с тормозным золотником.
вернутый упор 10 дополнительной скал-
ки 9, которая опорным торцом, имеющим выступ 16, нажимает на тормозной золотник 8 и останавливает шток 2 руки промышленного робота.
Формула изобретения
Рука промышленного робота, содержащая силовой цилиндр, скалку с регулируемым упором, жестко связанную Со штоком силового цилиндра, корпус с тормозными золотниками и дополнительную скалку с упором, отличающаяся тем, что, с целью расширения технологических возможностей за счет увеличения цисла регулируемых точек позиционирования, она снабжена приводом поворота дополнительной скалки и направляющим стержнем, закрепленным на корпусе тормозных золотников параллельно одному из них, а дополнительная скалка установлена на корпусе силового цилиндра и на направляющем стержне с возможностью продольного перемещения на величину хода тормозного золотника и взаимодействия ее торца с тормозным золотником.
W
13
Редактор М. Товтин
Составитель И. Бакулина
Техред Л.Олийнык Корректор С. Шекмар
Заказ 371
Тираж 691
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фиг. 2
Фиг.З
Подписное
| Рука промышленного робота | 1980 |
|
SU935262A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
