Изобретение относится к области машиностроения, в част-ности к зах ватным устройствам для манипуляторов.
Известен схват манипулятора, содержгиций зажимные рычаги с губками и систему управления ElJ. Недостатком известного схвата является низкая надежность, связанная с возможностью возникновения аварийных ситуаций при перекосах деталей .
Цель изобретения - повьйаеиие надежности манипулятора в работе.
Цель достигается тем, что предпагаелвлй схват снабжен датчиком-тормозом, выноЛненным в виде зубчатого колеса и подпружиненного фиксатора/ электрически связанного с системой управления, при этом по меньш Ме- ре одна из губок выполнена в виде установленного на оси ролика, при чем зубчатое колесо датчика-тормоза жестко связано с этой губкой и установлено 6 ним на одной оси.
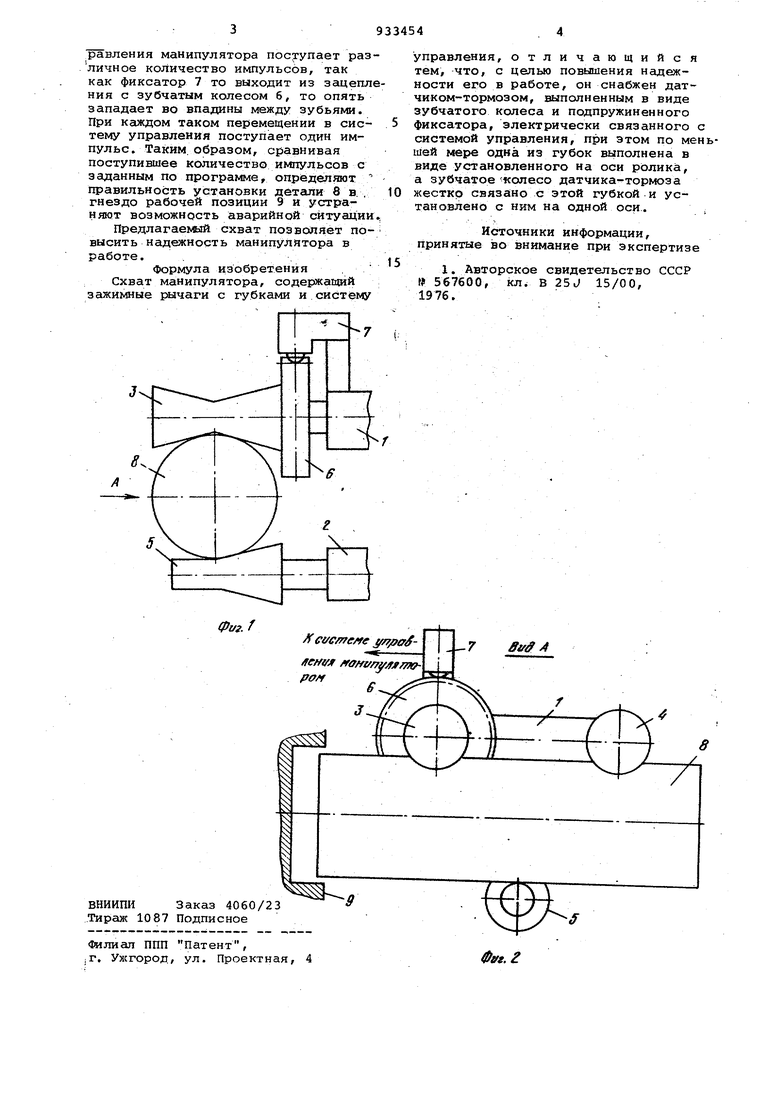
На фиг.1 изображен предпагае1««й схват манипулятора; на фиг.2 - вид по стрелке А на фиг.1.
Схват содержит захватные рычаги 1 и 2, причем на захватном рычаге 1 размещены ролики 3 и 4, а на эахватном рычаге 2 - ролик 5. Ролик 3 жестко связан с зубчатым колесом 6. На захватном-рычаге i также размешен подпружиненный фиксатор 7, связанный с системой управления манипулятором (не показана). Фиксатор 7 служит как информационным датчиком, так и тормозом, взаимодействуя с зубчатым колесом 6.
10
СХЕ2.Г работает следую1цим образом. Деталь 8 зажимается между роликами 3,4 и 5 захватных рычагов 1 и 2. Яри переносе детали 8 в рабочую позицию возникают инерционные нагрузки.
15
Удержание детали происходит за счет стопорения от проворота ролика 3 с зубчатым колесом 6 подпружиненным фиксатором 7. Усилие стопорения опуп ределяется усилием поджима фиксатора , 7 к зубчатому колесу 6.
При подводе детали 8 к рабочей позиции могут возникнуть из-за неточности базирования ситуации, когда деталь 8 своим торцом не .попадет BI
25 гнездо рабочей позиции 9. в этом случае усилие поджима превышает усилие стопорення фиксатора 7, и ролики 3,4 и 5 проворачиваются. При этом в зависимости от угла itOBo30 рота зубчатого колеса 5 в i-истему уп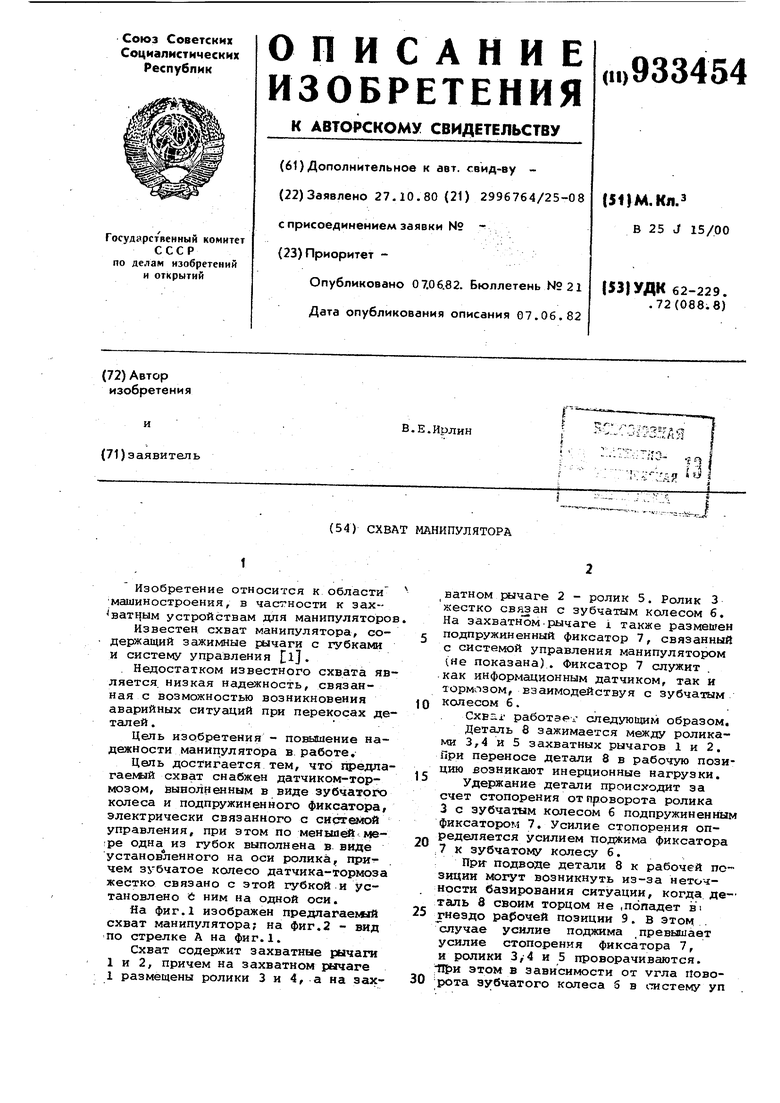
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| Захватное устройство | 1989 |
|
SU1660955A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
