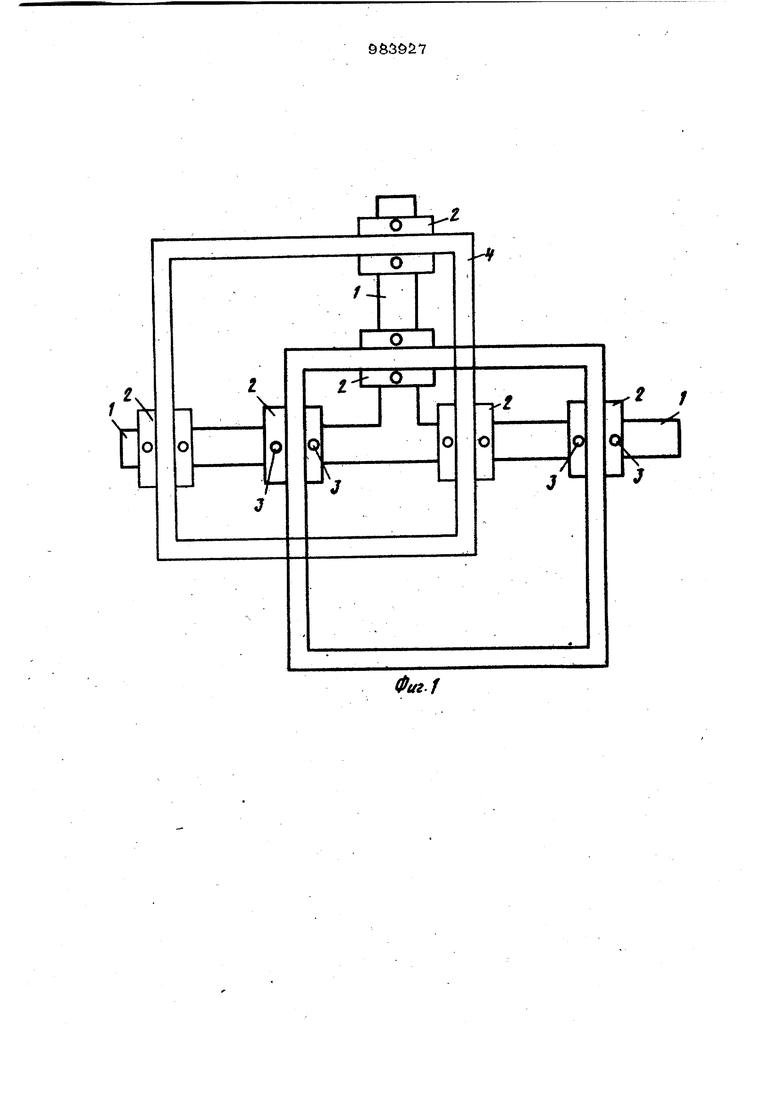
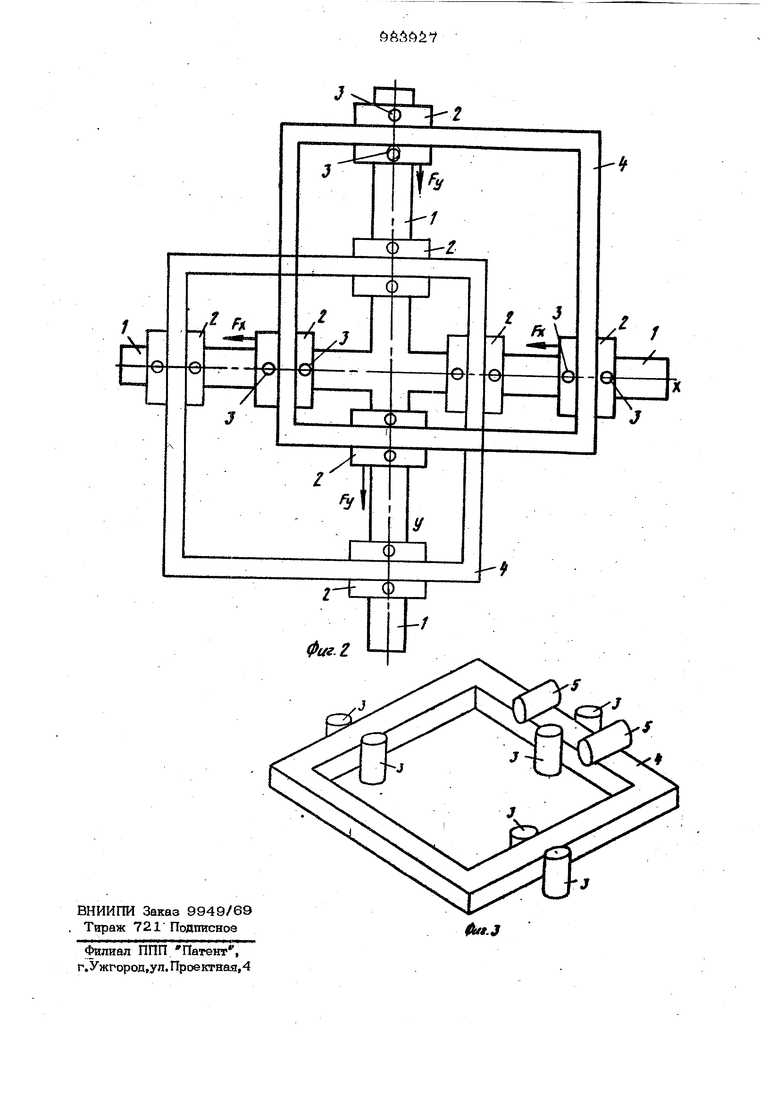
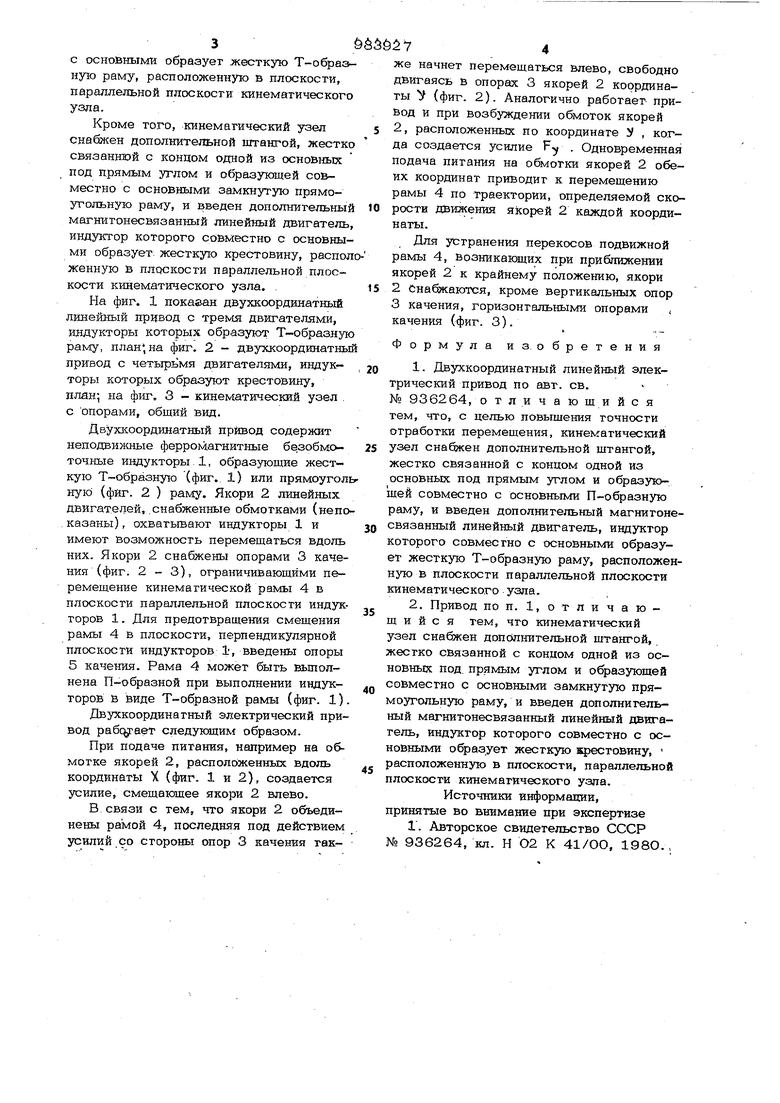
Иэобрегение относится к электрогёх нике, в частности к электрическим машинам, и может бьгть использовано в качестве электрического привода для ма шин термической резки, координатных ст лов металлообрабатьтаклцего оборупоэа- кия промышленных роботов и манипуляторов и т. д. По авт. св. № 936264 известен двухкоординатный линейный электрически привод, состоящий из двух магнитонесвя занных линейных двигателей, неподвижные зубчатые игздукторы котороых расположены перпешшкулярно другу, а подвижные якори связаны с рабочим органом кинематическим узлом, выполненным в виде двух штанг, жестко соединенных между собой концами под прямым углом, а каждый якорь снабжен опорами, допускающими перемещение расположенной между ними штанзгв в плоскости, перпендику;пярной плоскостн движения якоря. Кроме того, прявод содержит два дополнительных магшггонесвязанных линейных двигателя, аналогич- . ные основным, зубчатые индукторы которых образуют совместно с основными замкнутую прямоугольную раму, а штанги кинематического узла, жестко свдзанные между собой кошхамн под прямыми углами, офазуют крестовину, расположенную в плоскости, параллельной плоскости индукторов С1J . Недостатком привода является пони- женная точность, обусловленная низкой ж есткостью подвижного элемента. Лель изобретения - повышение точ ностн отработки перемешения. Поставленная цель достигается тем, что кинематический узел снабжен дополнительной штангой, жестко связанной с концом одной из основных под прямым углом в образующей совместно с основными П-о азную раму, и введен дополнительный магнитонесвязанный линейный двигатель, ;индуктор которого) совместно 3 с основными образует жесткую Тг-образиую раму, расположенную в плоскости, параллельной плоскости кинематического узла. Кроме того, кинематический узел снабжен дополнительной штангой, жестко связаннюй с концом одной из основных под прямым углом и образующей совместно с основными замкнутую прямоугольную раму, и введен дополнительный магнитонесвязанный линейный двигатель, индуктор которого совместно с основными образует жесткую крестовину, распол женную в плоскости параллельной плоскости кинематического узла. На фиг. 1 покааан двухкоординатный линейный привод с TpeNra двигателями, индукторы которых образуют Т-образную раму, планна фиг. 2 - двухкоординатньй привод с четырьмя двигателями, индукторь которых образуют крестовину, план; на фиг. 3 - кинематический узел . с опорами, общий вид. Двух1соординатный привод содержит неподвиишые ферром.агнитные безобмоточ1-1ые индукторы 1, образующие жесткую Т-образную (фиг. 1) или прямоугол ную (фиг. 2 ) раму. Якори 2 линейных двигателей, снабженные обмотками (непо казаны) , охватьюают индукторы 1 и имеют возможность перемещаться вдоль них. Якори 2 снабжены опорами 3 качения (фиг. 2-3), ограничивающими перемещение кинематической рамы 4 в плоскости параллельной плоскости индукторов 1. Для предотвращения смещения рамы 4 в плоскости, перпендикулярной плоскости индукторов 1, введены опоры 5 качения. Рама 4 может быть вьшолнена П-образной при выполнении индукторов в виде Т-образной рамы (фиг. 1) Двухкоординатный электрический привод работает следующим образом. При подаче питания, например на обмотке якорей 2, расположенных вдоль координаты X (фиг. 1 и 2), создается усилие, смещающее якори 2 влево. В связи с тем, что якори 2 объединены рамой 4, последня:я под действием усилий со стороны опор 3 качения так57же начнет перемещаться влево, свободно двигаясь в опорах 3 якорей 2 координаты V (фиг. 2). Аналогично работает привод и при возбуждении обмоток якорей 2, расположенных по координате У , когда создается усилие F . Одновременная подача питания на якорей 2 обеих координат приводит к перемещению рамы 4 по траектории, определяемой скорости движения якорей 2 каждой координаты. Для устранения перекосов подвижной рамы 4, возникающих при приближении якорей 2 к крайнему положению, якори 2 Снабжаются, кроме вертикальных опор 3 качения, горизонтальными опорами , качения (фиг. 3). Формула изобретения 1.Двухкоординатный линейный электричес1сий привод по авт. св. № 936264, отличающийся тем, что, с целью повышения точности отработки перемещения, кинематический узел снабжен дополнительной штангой, жестко связанной с концом одной из основных под прямым углом и образующей совместно с основными П-образную раму, и введен дополнительный магнитонесвязанный линейный двигатель, индуктор которого совместно с основными образует жесткую Т-образную раму, расположенную в плоскости параллельной плоскости кинематического узла. 2.Привод по п. 1, отличающийся тем, что кинематический узел снабжен дополнительной штангой, жестко связанной с концом одной из основных под. прямым углом и образующей совместно с основными замкнутую прямоугольную раму, и введен дополнительный магнитонесвязанный линейный двигатель, индуктор которого совместно с основными образует жесткую крестовину, расположенную в плоскости, параллельной плоскости кинематического узла. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 936264, кл. Н О2 К 41/ОО, 198О.,
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный линейный электрический привод | 1980 |
|
SU936264A1 |
| Двухкоординатный электрический двигатель | 1982 |
|
SU1083302A1 |
| Устройство для измерения отклонения формы внутренней поверхности экрана кинескопа | 1989 |
|
SU1675655A1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2028927C1 |
| Двухкоординатный линейный электродвигатель | 1979 |
|
SU942218A1 |
| Многокоординатный шаговый электродвигатель | 1982 |
|
SU1080240A1 |
| ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ГИБРИДНОЙ КИНЕМАТИКОЙ | 2013 |
|
RU2572112C2 |
| МАНИПУЛЯТОР "САМОХОДНАЯ ЧЕРЕПАХА ПРОХОРОВА WONDERTURTLE" (ВАРИАНТЫ) | 1999 |
|
RU2197746C2 |
| Двухкоординатный шаговый электродвигатель | 1983 |
|
SU1201971A1 |
| Двухкоординатный линейный шаговый двигатель | 1976 |
|
SU604094A1 |