1
Изобретение относится к транспортному машиностроению, в частности касается крепления грузоносителей к тяговым элементам конвейера, служащего для передачи изделий в автоматических роторных линиях с одного технологического ротора а другой, при выполнении операций штамповки, прессования, сборки.
Известна транспортная цепь, звенья которой шарнирно соединены между собой и имеют радиальные выемки со стороны, обращенной к ротору, в продольном пазу звеньев цепи подвижно смон- ,5 tиpoвaны откидные элементы с подпружиненными клещами и роликами, обеспечивающими с помощью системы рычагов разжим клещей Г1 .
Недостатком данной конструкции 20 цепи является ее сложность, а также значительные затраты времени при монтаже и демонтаже захватов, например, в случае их поломки.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является цепной грузонесущий конвейер, предназначенный для передачи изделий с одной технологической позиции на другую, содержащий транспортную цепь с шарнирно соединенными посредством осей звеньями, имею1 ми ролики и губки захватов, присоединенные к звеньям цепи
10 фикcиpyюtt(V4Mи элементами, выполненными в виде винтов и штифтов 2.
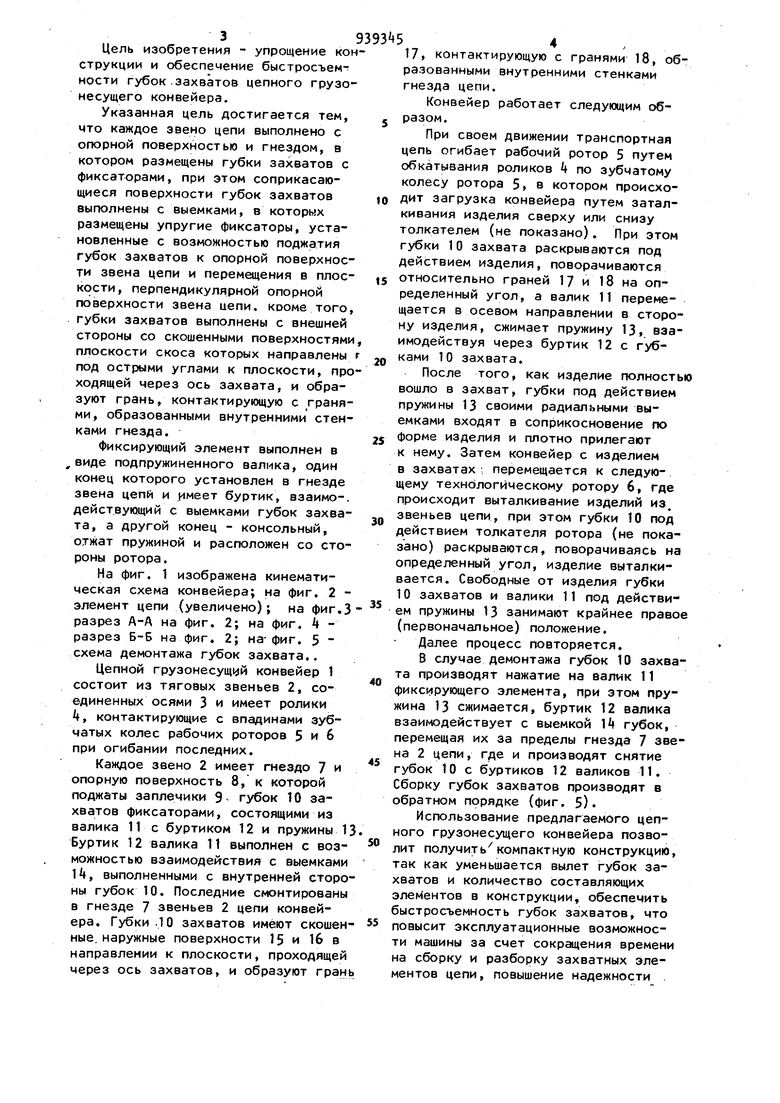
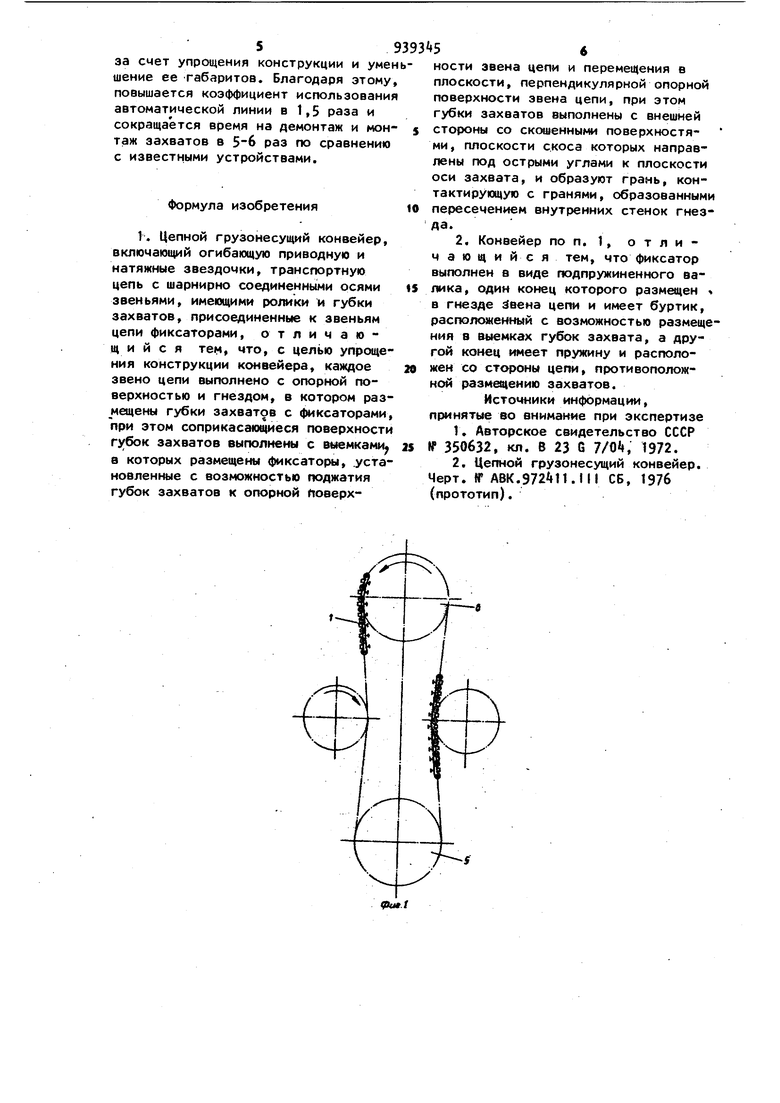
Известный конвейер также имеет сложную конструкцию и требует значительных затрат времени при монтаже и демонтаже губок захватов. Кроме того, значительный вылет губок захватов, характерный для данной конструкции, увеличивает габариты как самого конвейера, так и автоматической роторной линии, в которую он вписывается, увеличивается также нагрузка на цепь, что снижает надежность работы конвейера в целом. Цель изобретения - упрощение кон струкции и обеспечение быстросъемности губок .захватов цепного грузонесущего конвейера. Указанная цель достигается тем, что каждое звено цепи выполнено с опорной поверхностью и гнездом, в котором размещены губки захватов с фиксаторами, при этом соприкасающиеся поверхности губок захватов выполнены с выемками, в которых размещены упругие фиксаторы, установленные с возможностью поджатия губок захватов к опорной поверхности звена цепи и перемещения в плоскости, перпендикулярной опорной поверхности звена цепи, кооме того губки захватов выполнены с внешней стороны со скошенными поверхностями плоскости скоса которых направлены под острыми углами к плоскости, про ходящей через ось захвата, и образуют грань, контактирующую с гранями, образованными внутренними стенками гнезда. Фиксирующий элемент выполнен в , виде подпружиненного валика, один конец которого установлен в гнезде звена цепи и имеет буртик, взаимодействующий с выемками губок захвата, а другой конец - консольный, отжат пружиной и расположен со стороны ротора. На фиг. 1 изображена кинематическая схема конвейера; на фиг. 2 элемент цепи (увеличено); на фиг.З разрез А-А на фиг. 2; на фиг. 4 разрез Б-Б на фиг, 2; на-фиг. 5 схема демонтажа губок захвата.. Цепной грузонесущуй конвейер 1 состоит из тяговых звеньев 2, соединенных осями 3 и имеет ролики 4, контактирующие с впадинами зубчатых колес рабочих роторов 5 и 6 при огибании последних. Каждое звено 2 имеет гнездо 7 и опорную поверхность 8, к которой поджаты заплечики 9- губок 10 захватов фиксаторами, состоящими из валика 11 с буртиком 12 и пружины Буртик 12 валика 11 выполнен с воз можностью взаимодействия с выемкам 14, выполненными с внутренней сторо ны губок 10. Последние смонтированы в гнезде 7 звеньев 2 цепи конвейера. Губки .10 захватов имеют скоше ные, наружные поверхности 15 и 16 в направлении к плоскости, проходяще через ось захватов, и образуют гра 17, контактирующую с гранями 18, образованными внутренними стенками гнезда цепи. Конвейер работает следующим образом. При своем движении транспортная цепь огибает рабочий ротор 5 путем обкатывания роликов 4 по зубчатому колесу ротора 5, в котором происходит загрузка конвейера путем заталкивания изделия сверху или снизу толкателем (не показано). При этом губки 10 захвата раскрываются под действием изделия, поворачиваются относительно граней 17 и 18 на определенный угол, а валик 11 перемещается в осевом направлении в сторону изделия, сжимает пружину 13, взаимодействуя через буртик 12 с губками 10 захвата. После того, как изделие полностью вошло в захват, губки под действием пружины 13 своими радиальными выемками входят в соприкосновение по форме изделия и плотно прилегают к нему. Затем конвейер с изделием в захватах : перемещается к следующему технЬлогйческому ротору 6, где происходит выталкивание изделий из, звеньев цепи, при этом губки 10 под действием толкателя ротора (не показано) раскрываются, поворачиваясь на определенный угол, изделие выталкивается. Свободные от изделия губки 10 захватов и валики 11 под действием пружины 13 занимают крайнее правое (первоначальное) положение. Далее процесс повторяется. В случае демонтажа губок 10 захвата производят нажатие на валик 11 фиксирующего элемента, при этом пружина 13 сжимается, буртик 12 валика взаимодействует с выемкой 14 губок, перемещая их за пределы гнезда 7 звена 2 цепи, где и производят снятие губок 10 с буртиков 12 валиков 11. Сборку губок захватов производят в обратном порядке (фиг. 5). Использование предлагаемого цепного грузонесущего конвейера позволит получить компактную конструкцию, так как уменьшается вылет губок захватов и количество составляющих элементов в конструкции, обеспечить быстросъемность губок захватов, что повысит эксплуатационные возможности машины за счет сокрадения времени на сборку и разборку захватных элементов цепи, повышение надежности
за счет упрощения конструкции и уменьшение ее габаритов. Благодаря этому, повышается коэффициент использования автоматической линии в 1,5 раза и сокращается время на демонтаж и мон- j таж захватов в раз по сравнению с известными устройствами.
Формула изобретения
V. Цепной грузонесущий конвейер, включающий огибающую приводную и натяжные звездочки, транспортную цепь с шарнирно соединенными осями звеньями, имеющими ролики и губки захватов, присоединенные к звеньям цепи фиксаторами, отличающийся тем, что, с целью упрощения конструкции конвейера, каждое звено цепи выполнено с опорной поверхностью и гнездом, в котором раз х|ещены губки захватов с фиксаторами, при этом соприкасающиеся поверхности губок захватов выполнены с выемкам в которых размещены фиксаторы, .установленные с возможностью поджатия губок захватов к опорной Поверхности звена цепи и перемещения в плоскости, перпендикулярной опорной поверхности звена цепи, при этом губки захватов выполнены с внешней стороны со скошенными поверхностями, плоскости скоса которых направлены под острыми углами к плоскости оси захвата, и образуют грань, контактирующую с гранями, образованными пересечением внутренних стенок гнезда.
2. Конвейер по п. 1, отличающийся тем, что фиксатор выполнен в виде подпружиненного валика, один конец которого размещен « в гнезде йвена цепи и имеет буртик, расположенный с возможностью размещения в выемках губок захвата, а другой конец имеет пружину и расположен со стороны цепи, противоположной размещению захватов.
Источники информации, принятые so внимание при экспертизе
1.Авторское свидетельство СССР (Р 350632, кл. В 23 G 7/0, 1972.
2.Цепной грузонесущий конвейер. Черт. IP А8К..111 ОБ, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортирующее устройство роторно-конвейерной машины | 1982 |
|
SU1074777A1 |
| Роторный автомат питания | 1979 |
|
SU870063A1 |
| Установка для подготовки корпусов боеприпасов к снаряжению | 1970 |
|
SU1841253A1 |
| Ротор ориентации штучных изделий | 1978 |
|
SU841904A1 |
| Поточная линия для изготовления модельного блока в точном литье | 1983 |
|
SU1473900A1 |
| Устройство для загрузки станков | 1978 |
|
SU1040713A1 |
| Роторно-конвейерная линия | 1982 |
|
SU1027114A1 |
| Транспортно-накопительный участок автоматических роторно-конвейерных линий | 1988 |
|
SU1569185A1 |
| Цепной конвейер | 1988 |
|
SU1525088A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
iL г. J
9393 5,
J
