(54) ШАГОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| Технологическая линия для изготовления строительных изделий | 1980 |
|
SU903113A1 |
| Шагающий конвейер | 1986 |
|
SU1452755A1 |
| Шаговый конвейер | 1988 |
|
SU1572939A1 |
| Механизированный склад-накопитель штучных грузов | 1988 |
|
SU1648852A1 |
| Шаговый конвейер | 1990 |
|
SU1787880A1 |
| Шаговый конвейер | 1982 |
|
SU1082712A1 |
| Шаговый конвейер | 1985 |
|
SU1240695A2 |
| Шаговый конвейер | 1979 |
|
SU867799A1 |
| Аговый конвейер | 1971 |
|
SU473651A1 |
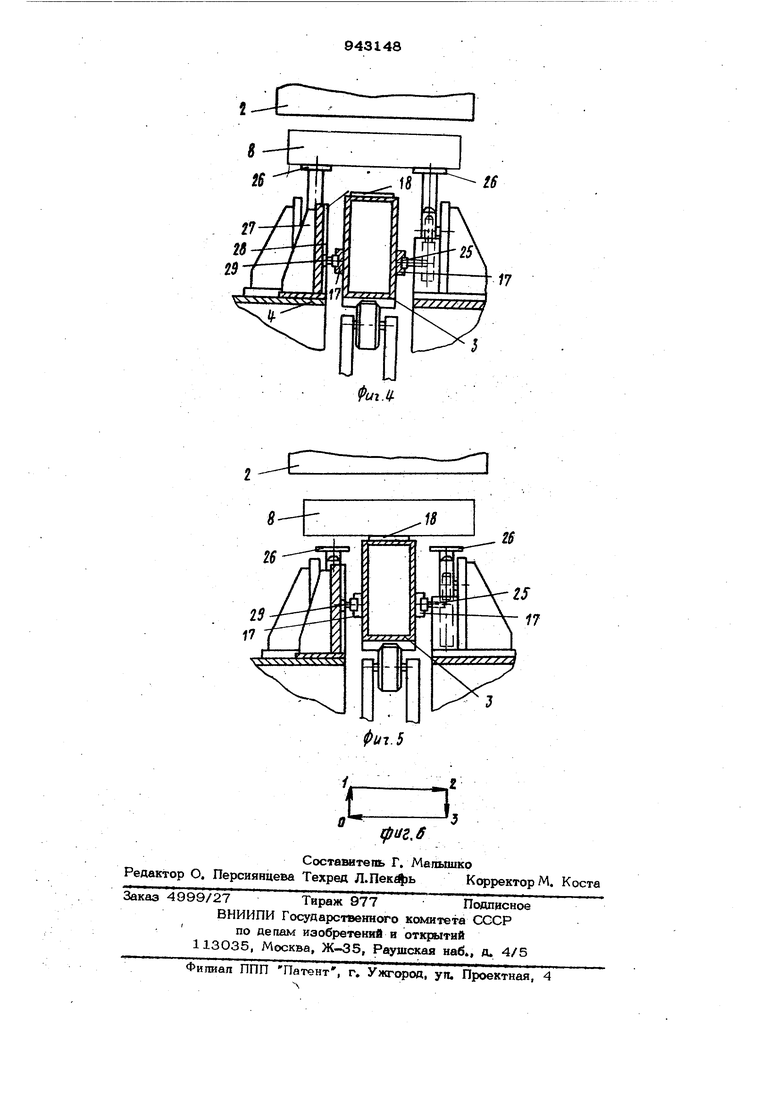
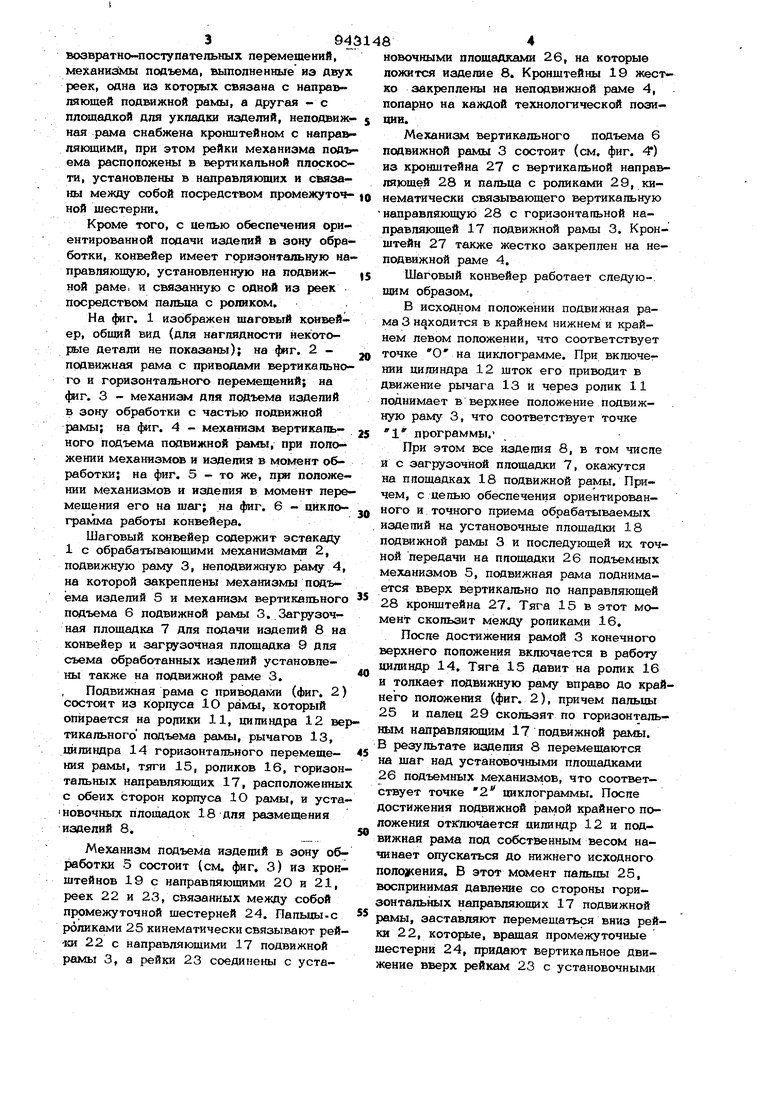
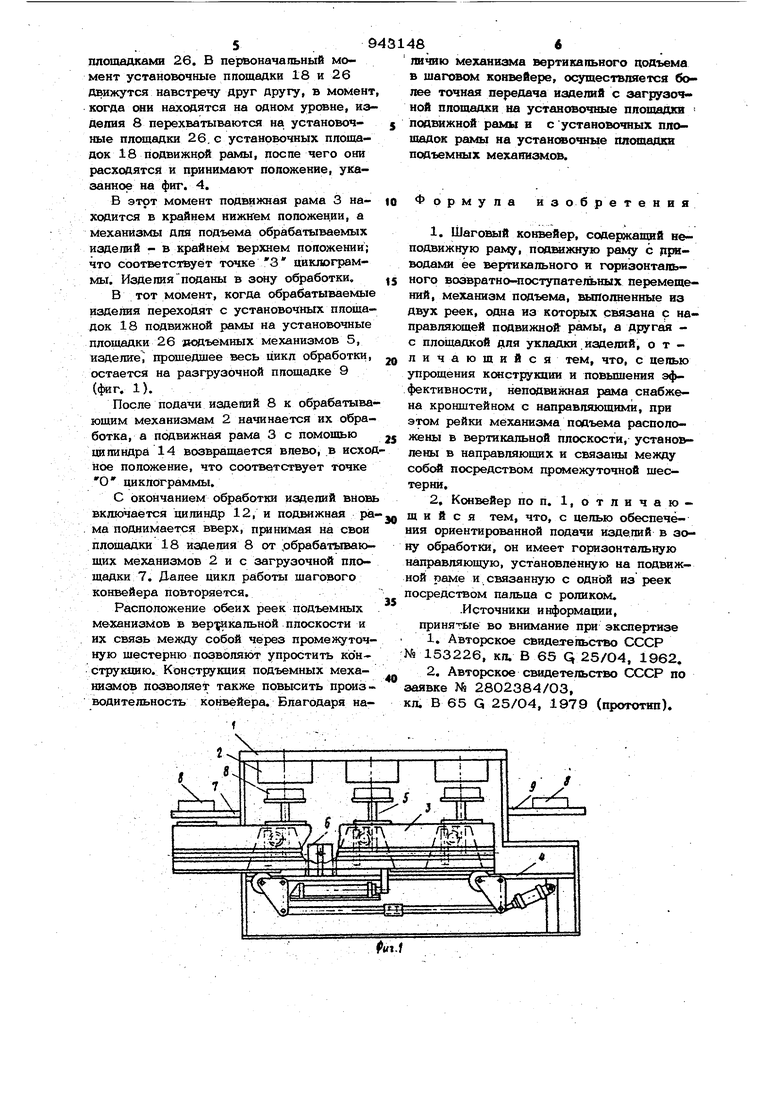
1 , . . . Изобретение относится к подъемнотранспортному маиганостроению, в частности к шаговым конвейерам. Известен шаговый конвейер для транс портирования штучных грузов, включающий рабочий орган, совершающий возвратно-поступательное движение посредством механического привода, и подъемные устройства, выполненные в виде прорезинен ных надувных рукавов и обеспечивающие подъем груза при обратном движении рабочего органа . Недостатки известного шагового конвейера заключаются в следующем. Выполнение механизма подъема в виде прорезиненных pyKiiBOB не обеспечивает достаточной высоты подъема изделия ига приспособления-спутника с изделием, что приводит к необходимости снабжения обрабатывающего оборудования дополнительными подъемными устройствами. Увеличение же высоты за счет увеличения диаметра рукавов ведет к снижению производительности. Кроме того, прорезиненные рукава не обладают достаточной Жесткостью и Долговечностью. Наиболее близким техническим решением к изобретению является шаговый конвейер, содержащий подвижную раму с приводами ее вертикального и горизонтального Возвратно-поступательных перемещений, неподвижную раму, механизмы подъема, выполненные из двух реек, одна из которых связана с направл51ющей подвижной рамы, а другая - с плошадкЫ для укпадки.изделий С23. Недостатками этого шагового конвейера являются сложность конструкции, низкая производительность из-за излишних перемещений подвижной рамы и возврата ее в исходное положение только после окончания цикла обработки. Цель изобретеш1я - упрощение конст рукции и повышение эффективности. Указанная цель достигается тем, что в шаговом конвейере, содержащем неподвижную раму, подвижную раму с привоД 1ми ее вертикального и горизонтального возвратно-поступательных перемещений, механизмы подъема, выполненные из двух реек, одна из которых связана с напра ляюшей подвижной рамы, а другая - с плсшадкой для укпадки изделий, неподвижная рама снабжена кронштейном с напра&ляюшими, при этом рейки механизма подъ ема расположены в вертикальной плоскости, установлены в направтююших и связаны между собой посредством промежуточной шестерни. Кроме того, с цепью обеспечения ориентированной подачи издепий в зону обработки, конвейер имеет горизонтальную направляющую, установленную на подвижной раме и связанную с одной из реек посредством пальца с ропиком. На фяг. 1 изображен шаговый конвейер, общий вид (для наглядности некоторые детали не показаны); на фиг. 2 подвижная рама с приводами вертикального и горизонтального перемещений; на 4яг. 3 - механизм для подгема изделий в зону обработки с частью подвижной рамы; на г. 4 - механизм вертикального подъема подвижной рамь, при положении механизмов и изделия в момент обработки; на фиг. 5 - то же, прк положении механизмов и изделия в момент перемещения его на шаг; на фиг. 6 - циклограмма работы конвейера. Шаговый конвейер содержит эстакаду 1 с обрабатывающими механизмами 2, подвижную раму 3, неподвижную раму 4, на которой закреплены механизмы изделий 5 и механизм вертикального подъема 6 подвижной рамы 3. Загрузочная площадка 7 для подачи изделий 8 на конвейер и загрузочная площадка 9 для съема обработанных изделий установлены также на подвижной раме 3. Подвижная рама с приводами (фиг 2) состсит из корпуса 1О рамы, который опирается на родики 11, цилиндра 12 вер тикального подъема рамы, рычагов 13, цилиндра 14 горизонтального перемещения рамы, Т5ГГИ 15, роликов 16, горизонтальных направляющих 17, расположенных с обеих сторон корпуса 1О рамы, и установочных площадок 18 для размещения изделий 8. Механизм подъема изделий в зону обработки 5 состоит (см. фиг. 3) из кронштейнов 19 с направляющими 2 О н 21, реек 22 и 23, связанных между собой промежуточной щестерней 24. Пальцы-с роликами 25 кинематически связывают рейки 22 с направляющими 17 подвижной рамы 3, а рейки 23 соединены с установочными площадками 26, на которые ложится изделие 8. Кронштейны 19 жестко закреплены на неподвижной раме 4, попарно на каждой технологической позиции. Механизм вертикального подъема 6 подвижной рамы 3 состоит (см. фиг. ) из кронштейна 27 с вертикальной направляющей 28 и пальца с роликами 29, кинематически связывающего вертикальную направляющую 28 с горизонтапьной направляющей 17 подвижной рамы 3. Кронштейн 27 также жестко закреплен на неподвижной раме 4. Шаговый конвейер работает следую-. щим образом. В исходном положении подвижная рама 3 находится в крайнем нижнем и крайнем левом положении, что соответствует точке О на циклограмме. При включении цилиндра 12 шток его приводит в движение рычага 13 и через ролик 11 псаднимает в верхнее положение подвижную раму 3, что соответствует точке 1 программы, При этом все изделия 8, в том числе и с загрузочной площадки 7, окажутся на площадках 18 подвижной рамы. Причем, с цепью обеспечения ориентированного и точного приема обрабатываемых издепий на установочные площадки 18 подвижной рамы 3 и последующей их точной передачи на площадки 26 подъемных механизмов 5, подвижная рама поднимается вверх вертикально по направляющей 28 кронштейна 27. Тяга 15 в этот момент скользит между роликами 16. После достижения рамой 3 конечного верхнего положения включается в работу цилиндр 14. Тяга 15 давит на ролик 16 и толкает подвижную раму вправо до крайнего положения (фиг. 2), причем пальцы 25и палец 29 скользят по горизонтальным направлякяцим 1 подвижной рамы. В результате изделия 8 перемещаются на шаг над установочными площадками 26подъемных механизмов, что соответствует точке 2 циклограммы. После достижения подвижной рамой крайнего положения отключается цилиндр 12 и подвижная рама под собственным весом начинает опускаться до нижнего исходного положения. В этот момент пальцы 25, воспринимая давление со стороны горизонтальных направляющих 17 подвижной рамы, заставляют перемешаться вниз рейки 22, которые, вращая промежуточные шестерни 24, придают вертикальное движение вверх рейкам 23 с установочными площадками 26. В первоначальный момент установочные ппошадки 18 и 26 движутся навстречу друг другу, в момент когда ежи находятся на одном уровне, из делия 8 перехватываются на установочные площадки 26. с установочных плошадок 18 подвижной рамы, после чего они расходятся и принимают положение, указанное на фиг. 4. В этот момент подвижная рама 3 находится в крайнем нижнем положении, а механизмы для подъема обрабатываемых изделий - в крайнем верхнем положении; что соответствует точке 3 циклограммы. Изделия поданы в зону обработки, В тот момент, когда обрабатываемые изделия переходят с установочных площадок 18 подвижной рамы на установочные площадки 26 диодъемных механизмов 5, изделие прошедшее весь цикл обработки, остается на разгрузочной площадке 9 (фиг. 1). После подачи изде пи и 8 к обрабатыва ющим механизмам 2 начинается их обработка, а подвижная рама 3 с помощью цилиндра 14 возвращается влево, в исход ное положение, что соответствует точке О циклограммы. С окончанием обработки изделий внов включается цилиндр 12, и поди1жная pia ма поднимается вверх, понимая на свои площадки 18 изделия 8 от .обрабатывающих механизмов 2 и с загрузочной площадки 7. Далее цикл работы шагового конвейера повторяется. Расположение обеих реек подъемных механизмов в вep ;икaпьнoй плоскости и их связь между собой через промежуточную шестерню позволякэт упростить конструкцию. Конструкция подъемных механизмов позволяет также повысить пргаиз водительность конвейера. Благодаря на9486 личию механизма вертикального подъема в щаговом конвейере, осуществляется более точная передача изделий с загрузочной площадки на установочные площадки подвижной рамы и с установочных площадок рамы на установочные площадки псАъемных механизмов. Форму изобретения 1.Шаговый конвейер, содержаний неподвижную раму, подвижную раму с дртводами ее вертикального и горизонтального возвратно-поступатеш,ных перемещений, механизм подъема, выполненные из двух реек, одна из которых связана с направляющей подвижной рамы, а другая с площадкой для укладки изделий, отличающийся тем, что, с цепью упрощения конструкции и повышения эффективности, неподвижная рама снабжена кронштейном с направляющими, при этом рейки механизма подъема расположены в вертикальной плоскости, установлены в направляющих и связаны между собсЛ посредством прсйлежуточной шестерни. 2,Конвейер поп. 1, отличаюЩ и и с я тем, что, с целью обеспечения ориентированной подачи изделий в зоу обработки, он имеет горизонтальную аправляюшую, установленную на подвижой раме и связанную с одной из реек осредством пальца с роликом. .Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 153226, кл. В 65 Q 25/04. 1962. 2.Авторское свидетельство СССР по аявке N9 2802384/03, л. В 65 G 25/04, 1979 (прототип).
IS
10
