Изобретение относится к машиностроению и может быть использовано в промышленных роботах, предназначенных для автоматизации различных технологических процессов.
Известен схват манипулятора, содержаший корпус и приводные губки, кинематически связанные зубчатой передачей с двумя рейками 1J.
Недостатком известного схвата является необходимость сообщения дополнительного движения звену манипулятора, несушему схват, при работе с деталями, расположенными в плоскости перемещения этого звена, что усложняет программу управления манипулятором.
Целью изобретения является упрошение программы управления манипулятором.
Указанная цель достигается тем, что схват манипулятора, содержащий корпус и приводные губки, кинематически связанные зубчатой передачей с двумя рейками, снабжен установленной шарнирно в корпусе направляющей с упором, несушей одну из реек, зубчатый венец которой выполнен с криволинейным участком, при этом на рейке выполнен выступ, рабочая поверхность которого расположена с возможностью контактирования с упором направляющей в момент перехода участка зацепления зубчатого венца рейки с прямолинейного на криволинейный.
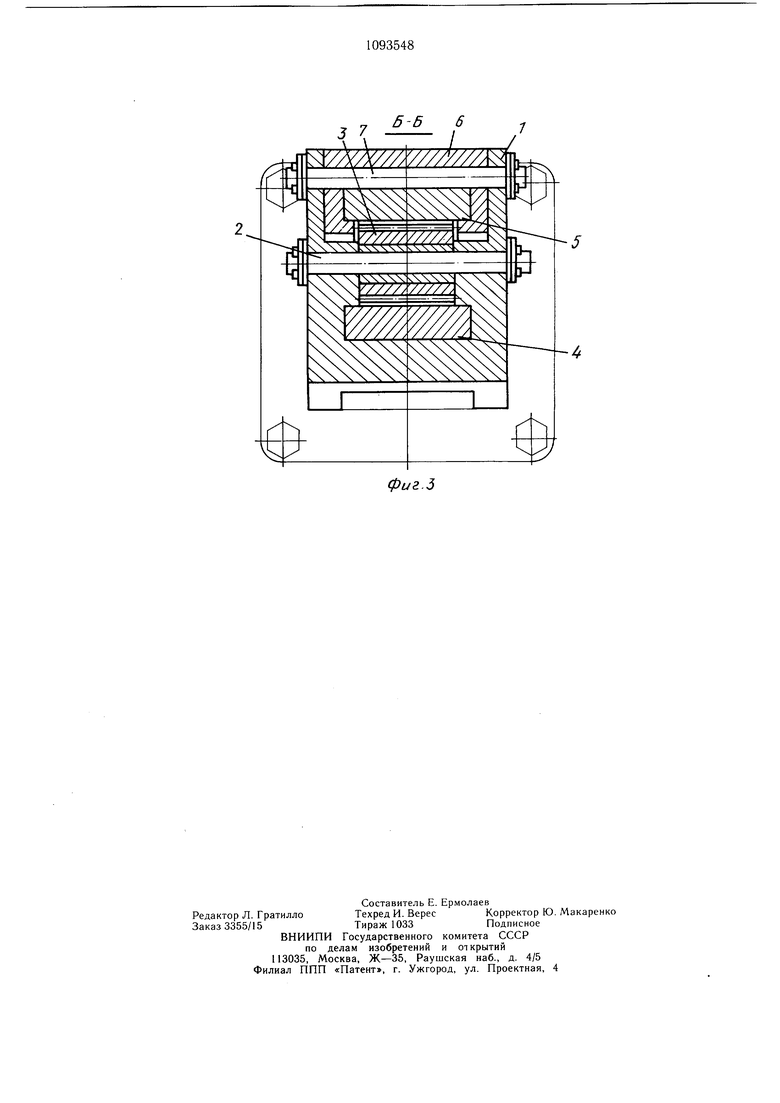
На фиг. 1 изображен схват в рабочем положении, обший вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1.
Схват содержит корпус 1, в котором на оси 2 смонтировано зубчатое колесо 3, находящееся в зацеплении с рейкой 4, установленной в корпусе 1, и рейкой 5, размешенной в направляющей 6, связанной щарнирно с корпусом 1 осью 7. На рейке 4 выполнена губка 8, ана рейке 5 - губка 9. На рейке 5 образован выступ 10, контактирующий с упором 11 корпуса 1 в момент перехода участка зацепления зубчатого венца рейки 5 с прямолинейного на криволинейный. Рейка 5 сиязана со штоком 12 силового цилиндра (не показан).
Устройство работает следующим образом.
Схват с изделием подводится к позиции установки изделия и производится его разжим. При разжиме шток 12 силового цилиндра схвата перемешает вправо рейку 4 с губкой 8. Одновременно с перемещением рейки 4 поступательное движение передается через зубчатое колесо 3 на рейку 5 и губку 9, перемешая ее в противоположную сторону. В конце хода выступ 10 в тот момент, когда зубчатое колесо 3 выходит с прямолинейного участка зубчатого венца рейки 5 на криволинейный, опирается в упор 11 направляюшей 6 и вместе с направляющей 6 рейка 5 поворачивается. Происходит разжим схвата. Зажим схвата осуществляется перемещением рейки 4 в противоположную сторону.
Предлагаемое устройство обеспечивает захват изделия, расположенного в плоскости перемещения руки манипулятора, одним движением - выдвижением руки со схватом, что упрощает программу управления манипулятором.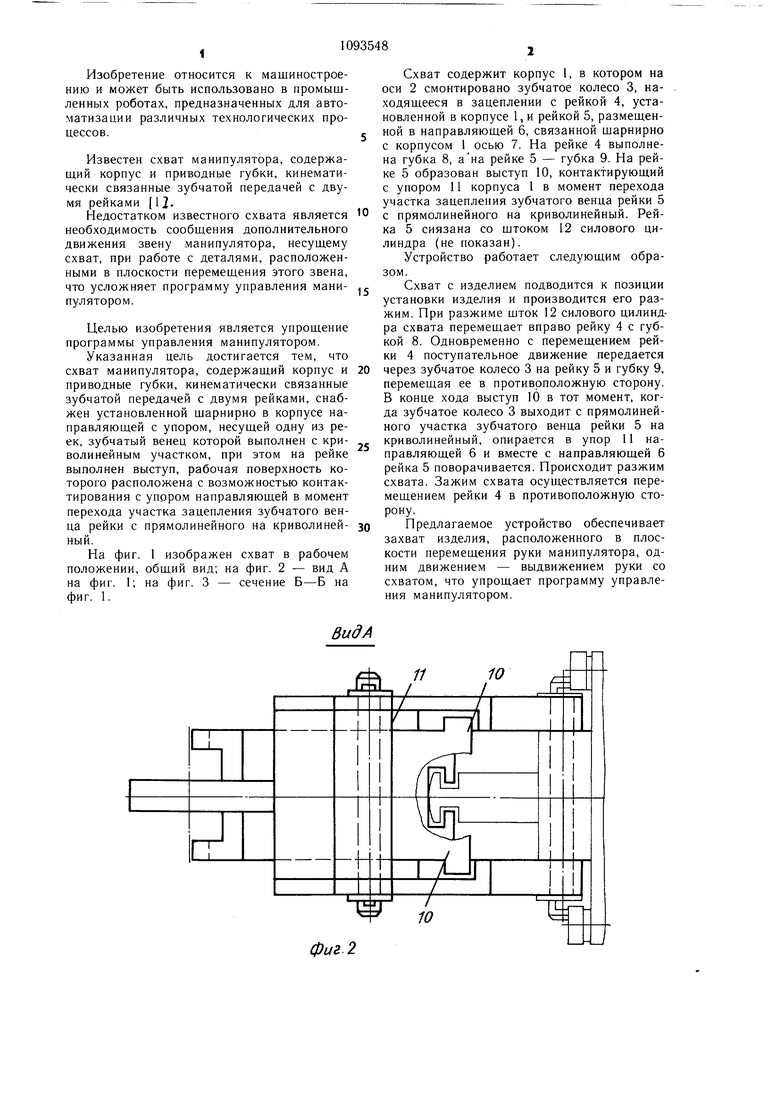
| название | год | авторы | номер документа |
|---|---|---|---|
| Стыковочное устройство робота | 1989 |
|
SU1627403A1 |
| Схват промышленного робота | 1986 |
|
SU1364473A2 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
| Схват манипулятора | 1982 |
|
SU1058773A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Захватное устройство | 1988 |
|
SU1521584A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Самоцентрирующий кулачковый патрон | 1985 |
|
SU1346345A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
СХВАТ МАНИПУЛЯТОРА, содержащий корпус и приводные губки, кинематически связанные зубчатой передачей с двумя рейками, отличающийся тем, что с целью упрощения программы управления манипулятором, он снабжен установленной шарнирно Б корпусе направляющей с упором, несущей одну из реек, зубчатый венец которой выполнен с криволинейным участком, при этом на рейке выполнен выступ, рабочая поверхность которого расположена с возможностью контактирования с упором направляющей в момент перехода участка зацепления зубчатого венца рейки с прямолинейного на криволинейный. f .r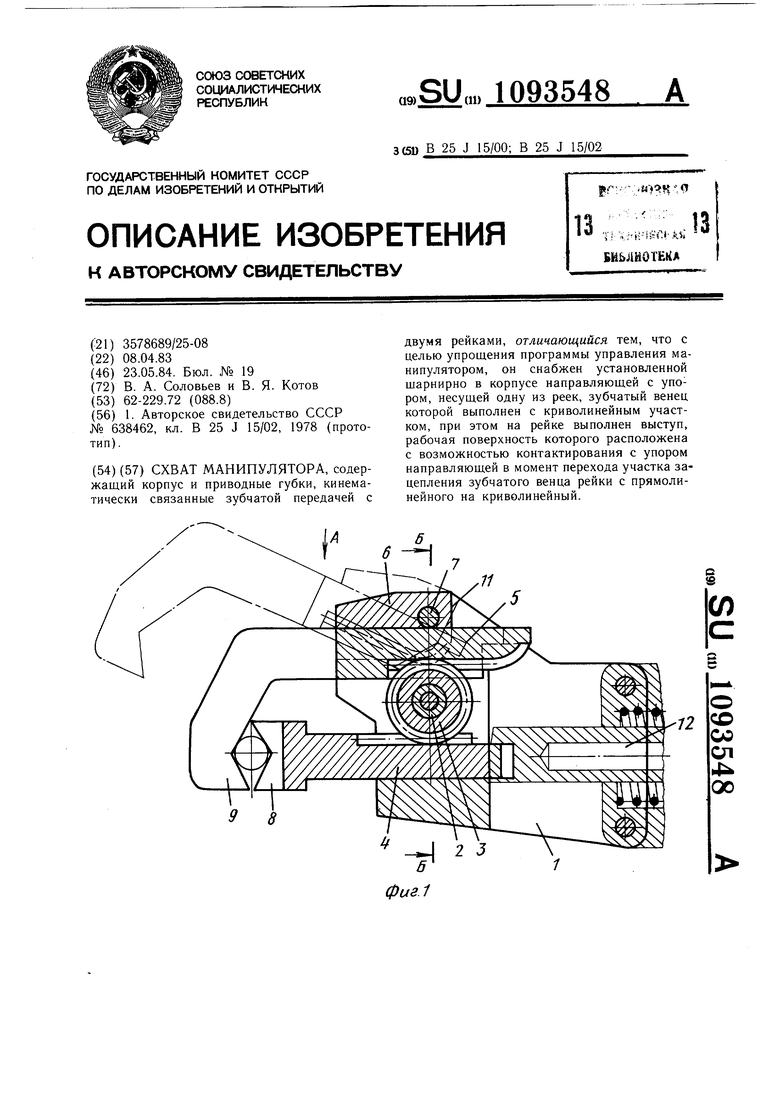
фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схват промышленного робота | 1977 |
|
SU638462A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
