(54) ШАГОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| Шаговый конвейер | 1981 |
|
SU967905A1 |
| Самоходное устройство для транспортирования и стыковки труб | 1982 |
|
SU1058810A1 |
| Шаговый конвейер | 1976 |
|
SU624836A1 |
| Шаговый конвейер | 1983 |
|
SU1165620A1 |
| Шаговый конвейер | 1988 |
|
SU1525089A1 |
| Устройство для транспортирования трубчатых изделий | 1983 |
|
SU1168494A1 |
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| Шаговый конвейер для перемещения заготовок через цилиндрический индуктор | 1988 |
|
SU1597398A1 |
| Шагающий конвейер | 1978 |
|
SU751726A1 |
1
/
Изобретение относится к подъемнотранспортному машиностроению, а именно к шаговым конвейерам для транспортирования мелких и средних грузов на короткое расстояние.
Известен шагаюший конвейер для транспортирования штучных грузов, включаюпдий неподвижную раму, подъемную платформу, ходовую часть и приводы горизонтального и вертикального перемещений 1.
Наиболее близким к изобретению является шаговый конвейер, содержаш.ий раму, установленную в направляюодих, нижнюю ходовую часть с копирами, на которых с возможностью перемеш.ения установлены подъемные ролики, расположенные на штоках носителя, упоры и привод 2 .
Недостатком этого конвейера является неудовлетворительная точность установки груза в крайних положениях, а также сложность конструкции.
Целью изобретения является упрощение конструкции и обеспечение точности установки грузов относительно нижней ходовой части.
Эта цель достигается тем, что в шаговом конвейере нижняя ходовая часть выполнена в виде балки прямоугольного сечения с пазом в ней и регулируемыми упорами на концах и снабжена шарнирно закрепленными подпружиненными рычагами и планкой, установленной в пазу с возможностью возвратно-поступательного перемещения, при этом планка имеет расположенные между регулируемыми упорами вертикальные направляющие, в которых установлены щтоки носителя, а подпружиненные рычаги установлены с возможностью взаимодействия с планкой.
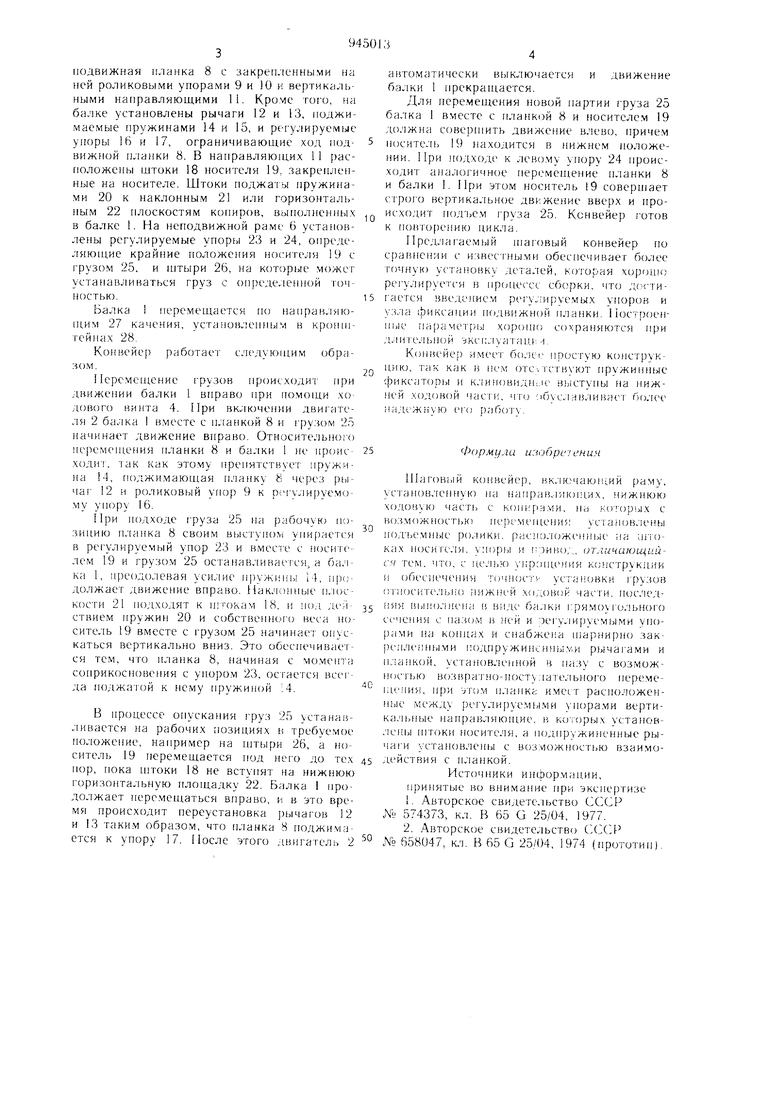
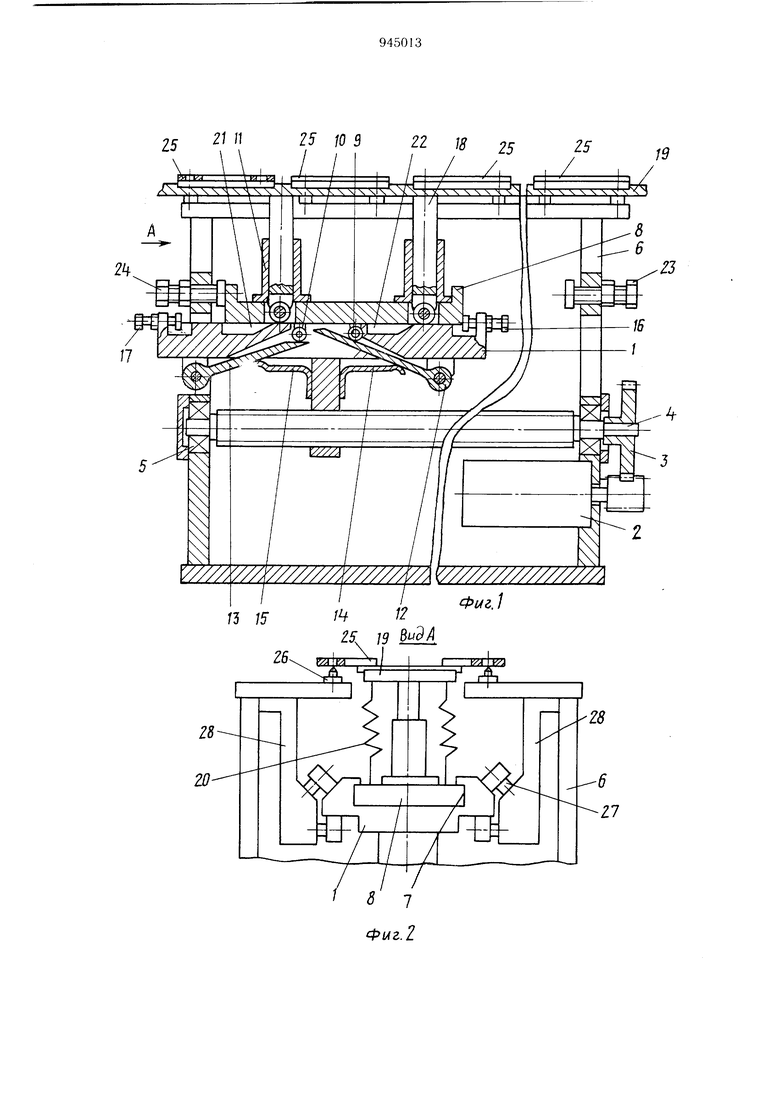
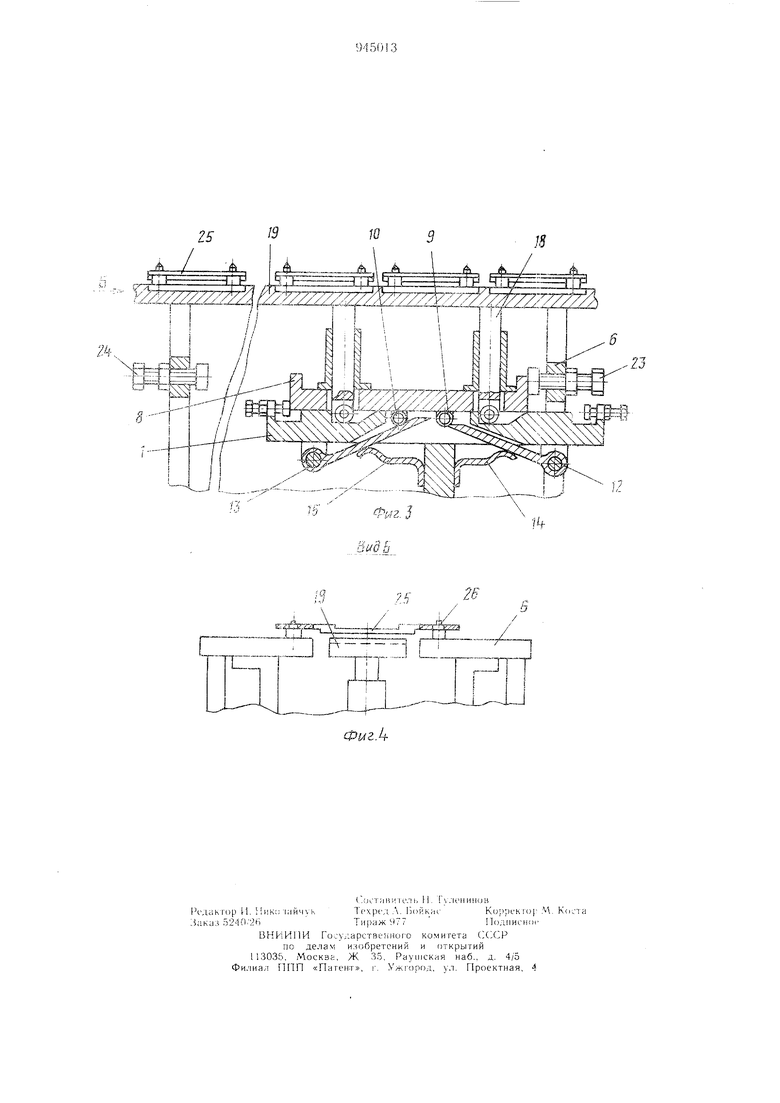
На фиг. 1 показан конвейер, разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - часть конвейера в положении, соответствующем концу цикла транспортирования груза; на фиг. 4 - вид Б на фиг. 3.
Конвейер состоит из нижней ходовой 20 части (балки) 1, приводимой в движение от двигателя 2 через пару зубчатых колес 3 и ходовой винт 4, установленный в щарикоподщипниках 5 на неподвижной раме 6. В продольном пазу 7 балки 1 расположена подвижная планка 8 с закрегыенными на ней роликовыми упорами 9 и )0 и вертикальными направляющими 11. Кроме , на балке установлены рычаги 12 и 13, поджимаемые пружинами 14 и 15, и регулируемые уноры 1В и 17, ограничивающие ход подвижной планки 8. В направляющих 11 расположены щтоки 18 носителя 19, закрепленные на носителе. Штоки поджаты пружинами 20 к наклонным 21 или горизонтальным 22 плоскостям копиров, выполненных в балке I. На неподвижной раме 6 установлены регулируемые упоры 23 и 24, определяющие крайние положения носителя 19 с 1рузом 25, и 26, на которые может устанавливаться груз с (преде,:1енной точностью. Балка 1 перемещается по паправ;1ЯК)1ди.1 27 качения, устапов.-енным в крон птеинах 28. Конвейе) работает следуюн1им образом Перемещение рузов происходит при движении балки 1 вправо при по.мощи ходового винта 4. При Бк;1К}черп- и двигателя 2 ба.пка I вместе с планкой 8 и грузом 25 начинает движение внраво. Относительного перемещения нланки 8 и ба.чки 1 не ироисходит, так как этому 1фенятстн.ует фужина 14, по;1жимающая планку 8 через piiiча 12 и роликовый упор 9 к Р;м-ули)уемо.му упору 16. При подходе груза 25 па рабочую позинию н:1анка 8 своим выступом унирает -я в регулируемый упор 23 и вместе с носителем 19 и грузом 25 остапав.чивается. а 6a,iка 1, 11 еодолевая усилие нрлжии1 1 14, ii)i;должает движение вправо. Наклонные i),:iocкости 21 подходят к н;окам 18, и под де.йствием пружин 20 и С(;бственн(м-о веса н{.сптель 19 вместе с rpyatjM 25 начинает опускаться вертикально вниз. Это обеспечивается тем, что планка 8, начиная с мо.мента сонрикосповения с упором 23, остается BCt4да поджатой к нему |ружи1Н.)й :4. В процессе опускания груз 25 устанав;1пвается па рабочих позициях в требуемое положение, например на Н1тыри 26, а носитель 19 перемещается нод пего до тех нор, пока нтоки 18 не вступят на нижнюю горизонтальную плои;адку 22. Балка продолжает перемещаться вправо, и в это время происходит переустановка рычагов 12 и 13 таки.м образом, что планка 8 поджимается к упору 17. После этого двигатель 2 автоматически выключается и движение балки 1 прекращается. Для перемещения новой партии груза 25 балка 1 вместе с планкой 8 и носителе.м 19 должна совершить движение влево, причем посите.п 19 находится в нижнем ноложении. При подходе к лево.му упору 24 происходит аналогичное Г1еремен|ение нланки 8 и балки 1. При этом носитель 19 совершает строго вертикальное движение вверх и происходит нод1)е.м 1руза 25. Конвейер готов к повто)ению цикла. Предлагаемый пшговый конвейер по с;)авпенни с и.звесчны.чи обеспечивает более точную установку дета.1ей, которая хороню ре1улируется в процессе сборки, что достигается Бведепис.м ре1ули)уе.мых упоров и уз,1а |Эиксации подвижной планки. lujcTiJoenпые ||аг)амет;)1 хорошо сохраняются при длительной эксп.туатацг -i. Конвейер имеет 6ojje. ростун) конструкцию, так как в пе.ч отс-,тствуют пружинные фиксаторы и к: иновндп:.к BijiCTyiibi на нижней .ходовой части;, чго -:1бусл.ч1.1иваст бо.кч ;1лдс-ж:пую ei4i f)a6oiv. Формула изобрс ения Шаговый ко1шейер, вк,П чаюп;.ий раму, установлспнук) на |1апра ляк)|цих, нижнюю ходовую част1 с ко11и:р.чми, на .ксггорых с ноз.можностью не|н-меп1епия установ.1ены подье.мные ролики. ).1оже1ип с ;ia uiioках носигс-л и viiopsj и :)ии;о;., отличающийся, тем, что, ;; целью ,пр;)П1е.(ия к.иструк11ни и обеС||ече 1ия точност-- установки 1рузов )Т(осит(Ч},ио нижщй ходовой части, последняя Ibnio.iiieiia (s виде балки грямоуго,1ьного сечения с паз(;м в ней и эегули)уемыми упо)ами на KOinuix и снабжена шарнирпо зак(Нпленньгми :о;цфужи11снны.уи рычагами и 11.лапкой, установ.ченной в пазу с воз.можпостыо возвратно-nocTv .тательного перемеnieiHiH, при эт-;)м ii-ianKfe имеет располс.)женпые между регу:п-1)уемыми унора.чи вертика, направляюп1.ие. в которых установ.iciH) Н1ТОКИ носителя, а под фужиненпые рыча1и установлены с возможностью взаи.модействия с п;1анкой. Источники И11фор.ман,ии, принятые во внима1п-1е при эксне|)тизе 1.Авторское свидете.пзство СССР .NH 574373, кл. В 65 G 25/04, 1977. 2.Авторское свидетельство С..Р № 658047, кл. В 65 G 25/04, 1974 (прототип). 25 Ю 9 IГ ГЗ 15 25 19
Z6 22 18 25 Фиг.
