(54) АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКИХ ЛИНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| Автооператор для гальванических линий | 1980 |
|
SU952703A1 |
| Автооператор для гальванических линий | 1983 |
|
SU1138369A1 |
| Автооператор для гальванических линий | 1981 |
|
SU1004230A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Автооператор для гальванических и химических линий | 1981 |
|
SU981463A1 |
| АВТООПЕРАТОР АММ 2 ДЛЯ ГАЛЬВАНИЧЕСКИХ ЛИНИЙ | 1970 |
|
SU272755A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватная траверса | 1978 |
|
SU796166A1 |
| Грузоподъемное устройство | 1989 |
|
SU1724562A1 |

1
Предлагаемое изобретение относится к области нанесения гальванических покрытий, в частности, к устройствам для обработки деталей на подвесках в автоматических и механизированных линиях.
Известен автооператор для гальванических линий, включающий корпус с вертикальными направляющими, в которых размещен подъемно-опускной орган с установленными на нем ведущей и ведомой звездочками 1.
Недостатком данного устройства является низкая производительность, так как подъемно-опускной орган имеет одну скорость перемещерия груза.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является автооператор для гальванических линий, включающий приводную тележку горизонтального перемещения с вертикальной стойкой, размещенную на ней каретку вертикального перемещения с грузозахватным органом, связанную с приводом через трособлочную систему, и механизм замедления скорости захватного огана 2.
Недостаток устройства -высокая скорость ввода обрабатываемых изделий с подвеской в раствор ванн, так как величина
пути замедления скорости является незначительной и замедление происходит в момент установки подвески на ложе.менты ванн. Расширение зоны пути замедления приводит к увеличению габаритов автооператора и усложнению его конструкции.
Кроме того, соотношение длины плеч рычагов ограничивает возможность увеличения пути замедления за счет их поворота на незначительный угол.
Указанные недостатки ведут к соскаль10зыванию деталей с подвесок, нарушению поверхности токовых контактов деталей с подвесками, ориентации детали в ванне, а также к выбросу растворов из ванн.
Цель изобретения - повышение качества 15 обработки изделий и увеличение надежности работы автооператора.
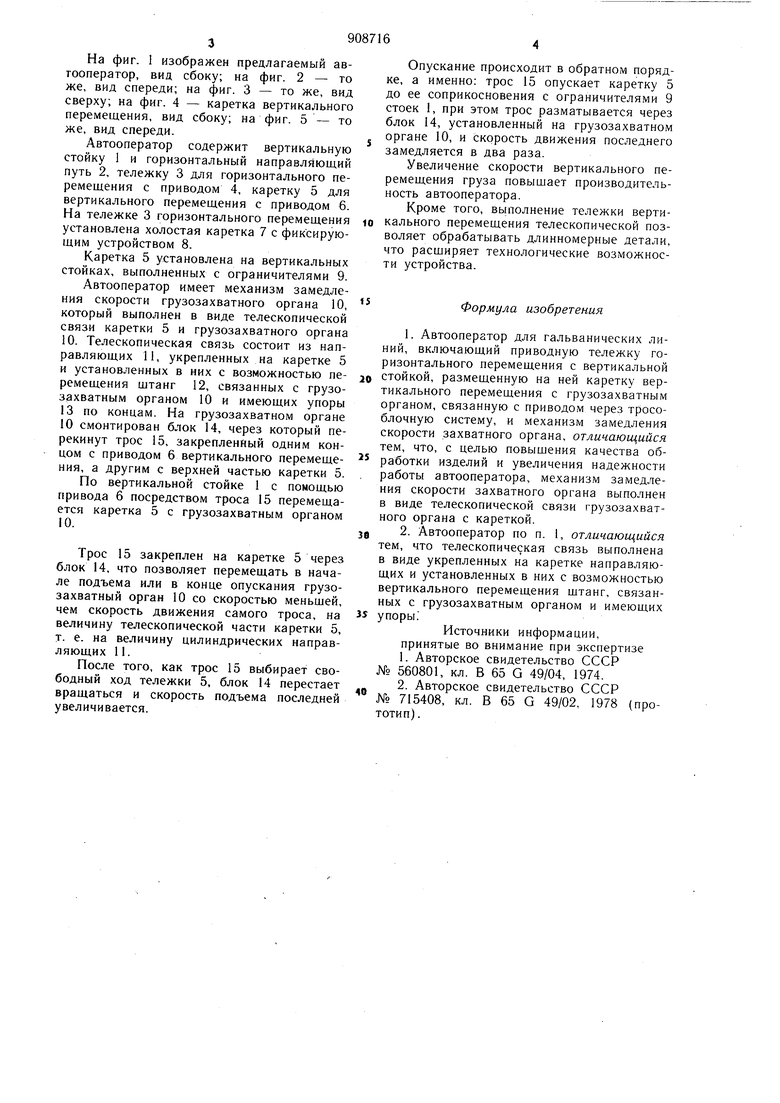
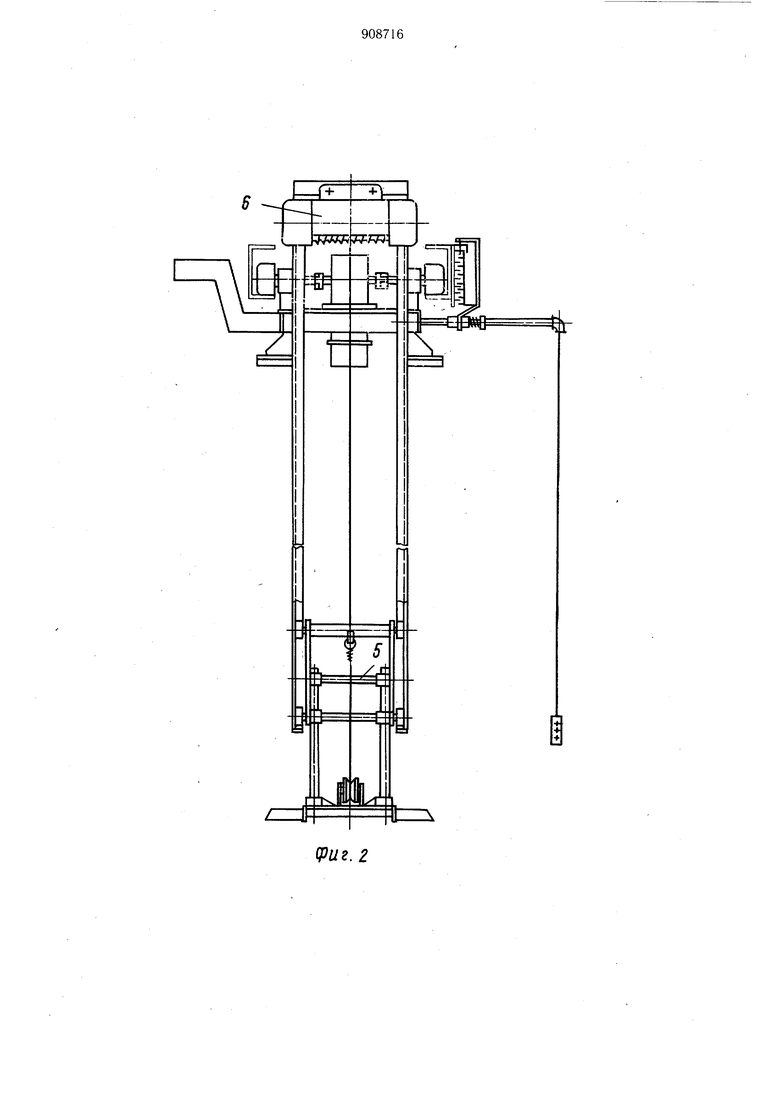
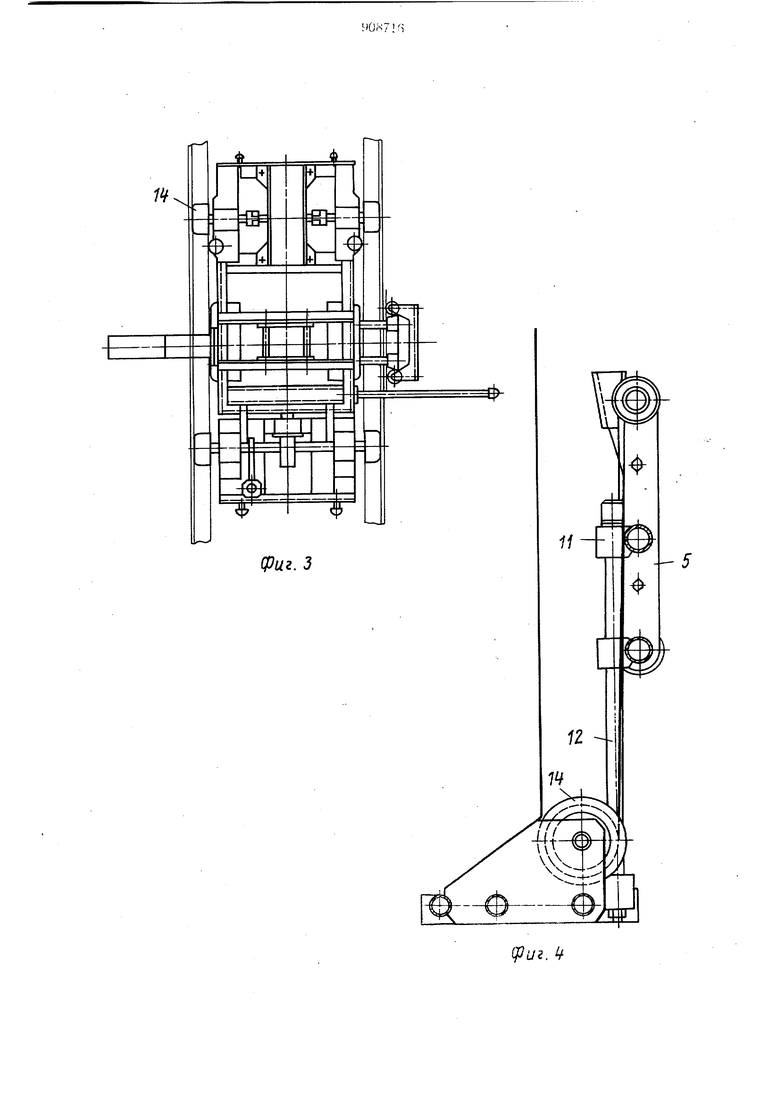
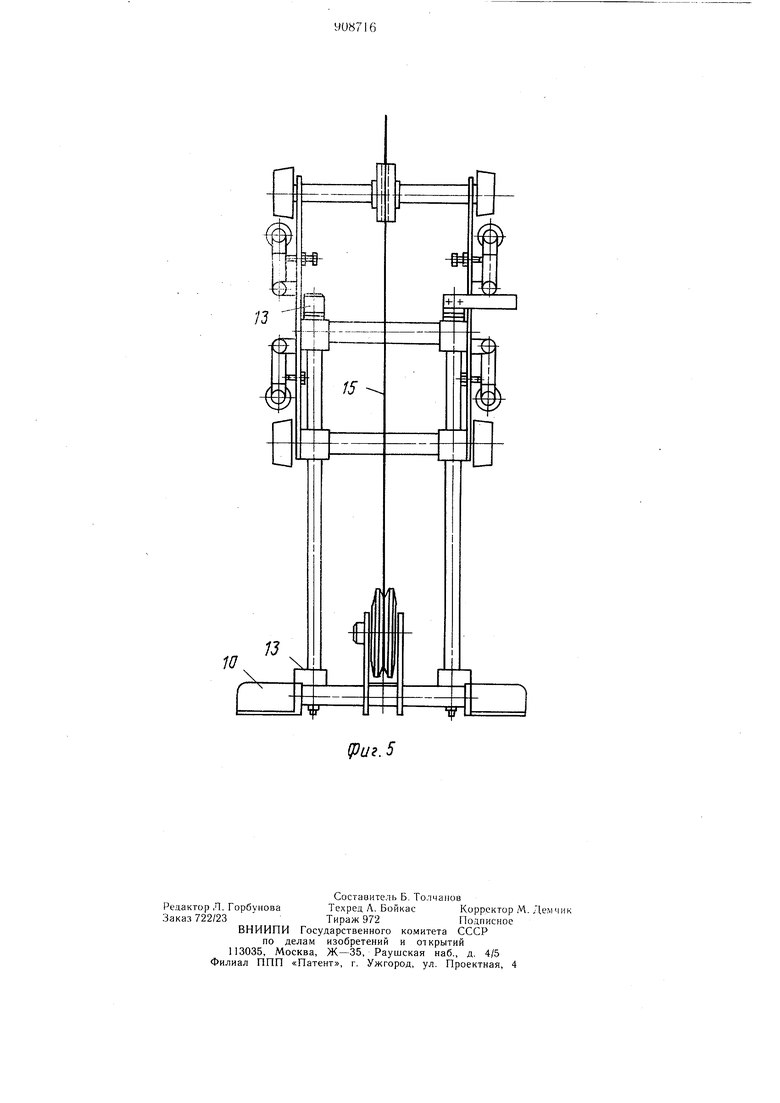
Указанная цель достигается тем, что механизм замедления скорости захватного органа выполнен в виде телескопической связи грузозахватного органа с кареткой. При этом телескопическая связь выполнена в виде укрепленных на каретке направляющих и установленных в них с возможностью вертикального перемещения штанг, связанных с грузозахватным органом и имеющих упоры. На фиг. 1 изображен предлагаемый автооператор, вид сбоку; на фиг. 2 - то же, вид спереди; на фиг. 3 - то же, вид сверху; на фиг. 4 - каретка вертикального перемещения, вид сбоку; на фиг. 5 - то же, вид спереди. Автооператор содержит вертикальную стойку 1 и горизонтальный направляющий путь 2, тележку 3 для горизонтального перемещения с приводом 4, каретку 5 для вертикального перемещения с приводом 6. На тележке 3 горизонтального перемещения установлена холостая каретка 7 с фиксирующим устройством 8. Каретка 5 установлена на вертикальных стойках, выполненных с ограничителями 9. Автооператор имеет механизм замедления скорости грузозахватного органа 10, который выполнен в виде телескопической связи каретки 5 и грузозахватного органа 10. Телескопическая связь состоит из направляющих И, укрепленных на каретке 5 и установленных в них с возможностью перемещения щтанг 12, связанных с грузозахватным органом 10 и имеющих упоры 13 по концам. На грузозахватном органе 10 смонтирован блок 14, через который перекинут трос 15, закрепленный одним концом с приводом 6 вертикального перемещения, а другим с верхней частью каретки 5. По вертикальной стойке 1 с помощью привода 6 посредством троса 15 перемещается каретка 5 с грузозахватным органом 10. Трос 15 закреплен на каретке 5 через блок 14, что позволяет перемещать в начале подъема или в конце опускания грузозахватный орган 10 со скоростью меньщей. чем скорость движения самого троса, на величину телескопической части каретки о, т. е. на величину цилиндрических направляющих 11. После того, как трос 15 выбирает свободный ход тележки 5, блок 14 перестает вращаться и скорость подъема последней увеличивается. Опускание происходит в обратном порядке, а именно: трос 15 опускает каретку 5 до ее соприкосновения с ограничителями 9 стоек 1, при этом трос разматывается через блок 14, установленный на грузозахватном органе 10, и скорость движения последнего замедляется в два раза. Увеличение скорости вертикального перемещения груза повыщает производительность автооператора. Кроме того, выполнение тележки вертикального перемещения телескопической позволяет обрабатывать длинномерные детали, что расщиряет технологические возможности устройства. Формула изобретения 1. Автооператор для гальванических линий, включающий приводную тележку горизонтального перемещения с вертикальной стойкой, размещенную на ней каретку вертикального перемещения с грузозахватным органом, связанную с приводом через трособлочную систему, и механизм замедления скорости захватного органа, отличающийся тем, что, с целью повышения качества обработки изделий и увеличения надежности работы автооператора, механизм замедления скорости захватного органа выполнен в виде телескопической связи грузозахватного органа с кареткой. 2. Автооператор по п. I, отличающийся тем, что телескопическая связь выполнена в виде укрепленных на каретке направляющих и установленных в них с возможностью вертикального перемещения щтанг, связанных с грузозахватным органом и имеющих упоры. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 560801, кл. В 65 G 49/04, 1974. 2.Авторское свидетельство СССР № 715408, кл. В 65 G 49/02, 1978 (прототип).
(риг.1
I
чДЛТТ ТТ
-rJ
в
ь
30
(риг. 2
.
(Риг. 5
