Изобретение относится к гальванотехнике, в частности к автооператорам для гальванических линий обработки печатных плат.
Целью изобретения является снижение металлоемкости.
На фиг.1 изображен предлагаемый автооператор в исходном состоянии, общий вид; на фиг.2 - то же, вид сбоку; на фиг.З - то же, автооператор в крайнем нижнем положении; на фиг.4,5 - датчик положения каретки вертикального перемещения в двух видах.
Автооператор содержит (фиг.1) каретку 1 горизонтального перемещения, каретку вертикального перемещения в виде рейки 2 и размещенным внутри нее штангой 3 с ловителями 4, при- водной механизм в виде электродвигателей 5 и 6 и зубчатых колес 7 - 10, монорельс 11, с которым взаимодейству катки 12. Для исключения опрокидывания каретки I автооператор имеет ка- ток 13, взаимодействующий с монорельсом 14.
Приводной механизм имеет датчик положения каретки вертикального перемещения в виде зубчатого диска 15 с установленным на его торце магнито 16 и герконов 17, расположенных в плоскости вращения диска 15, связанного с зубчатым колесом 8 приводного механизма.
Штанга 3 соединена с кареткой 1 горизонтального перемещения гибкой связью 18 через блок 19, зафиксированный на рейке 2.
5
5
0
Q 5
g
5
Автооператор работает следующим образом.
На ловителях 4 закрепляют обрабатываемый печатный узел 20. При поступлении сигнала с пульта управления (не показан) на приводной электродвигатель 6 каретка 1 горизонтального перемещения посредством зубчатых колес 9 и 10 и катков 12 передвигается по монорельсу 11, 14 и устанавливается штангой 3 с ловителями 4 и обрабатываемым печатным узлом 20 над соответствующей ванной 21 с рчбочим раствором 22. Далее по команде блока программ сигнал поступает на приводной электродвигатель 5, вращение зубчатого колеса 7 передается зубчатому колесу 8 и преобразуется в поступательное перемещение рейки 2 вниз. При этом штанга 3 с ловителями 4 и печатным узлом 2 также начнет опускаться, так как блок 19 опускается совместно с рейкой 2. Поскольку гибкая связь 18 одним концом зафиксирована на каретке 1, а другим - на штанге 3, скорость перемещения последней вдвое превышает скорость перемещения рейки 2 за счет изменения длин ветвей гибкой связи 18. Одновременно вращение зубчатого колеса 8 сообщается зубчатому диску 15. Магнит 16, закрепленный на диске 15, воздействует на контакты геркона 17, замыкая их. При замыкании контактов геркона 17 из программного блока поступает сигнал на отключение электродвигателя 5 - печатный узел 20 занимает положение, показанное на фиг.З сплошными линиями. Проис515
ходит обработка печатного узла 20 в рабочем растворе 22 ванны 21. Далее по сигналу программного устройства на электродвигатель 5 поступает сигнал реверсирования - штанга 3 посредством зубчатых колес 7 и 8 и рейки 2 поднимается. Печатный узел 20 бла- даря зубчатой передаче 8,15, взаимодействию магнита 16 и очередного гер- кона J 7 (как это было описано выше) занимает положение, показанное на фиг.1 пунктирными линиями. Происходит дополнительная более эффективная очистка печатного узла 20 в парах рабочего раствора. По окончании обработки по сигналу из блока программ срабатывает двигатель 5 и штанга 3, продолжая подъем, занимает исходное верхнее положение, фиксируемое датчиком вертикального-перемещения (фиг.4) Автооператор подготовлен для переноса печатного узла 20 в следующую ванну 21. Цикл работы автооператора повторяется.
Предложенные автооператоры на 500 мм (на размер печатного узла) оказываются ниже известного, высоту которого пришлось бы увеличивать на данную величину для обработки печатного узла в паровой фазе рабочего раствора. Кроме компактности автоопе4
ратор приобретает динамическую устойчивость за счет надежного контактирования монорельсов с кареткой горизонтального перемещения из-за снижения общей высоты при сохранении опорной базы.
Формула изобретения i. Автооператор для гальванических линий, содержащий корпус, монорельс, каретки горизонтального и вертикального перемещения, штангу с ловителями к приводной механизм, о т л и- чающийся тем, что, с целью снижения металлоемкости, он снабжен датчиком и блоком, а каретка вертикального перемещения выполнена телескопической в виде рейки с размещенной в ней штангой с ловителями, соединенной гибкой связью с кареткой горизонтального перемещения через блок, при этом блок зафиксирован на рейке.
2, Автооператор по п.1, о т л и- чающийся тем, что датчик выполнен в виде зубчатого диска с магнитами на его торце и герконами, расположенными в плоскости вращения диска, связанного посредством зубчатого колеса с приводным механизмом, причем датчик размещен в корпусе автооператора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для нанесения гальванических покрытий | 1989 |
|
SU1696612A1 |
| Кареточная автоматическая линия для нанесения покрытий | 1985 |
|
SU1306985A1 |
| Автооператор для гальванических линий | 1980 |
|
SU889752A1 |
| Линия для химического фрезерования крупногабаритных изделий | 1987 |
|
SU1497278A1 |
| Автооператор для гальванических линий | 1980 |
|
SU901370A1 |
| Тележка для перевозки штучных грузов | 1985 |
|
SU1348253A1 |
| Автооператор для гальваноавто-MATOB | 1979 |
|
SU850761A1 |
| Автоматическая линия для металлизации плоских деталей | 1987 |
|
SU1507883A1 |
| Устройство для нанесения покрытий | 1982 |
|
SU1070221A1 |
| Автооператор | 1985 |
|
SU1247435A1 |

Изобретение относится к гальванотехнике, в частности к автооператорам для гальванических линий обработки печатных плат. Целью изобретения является снижение металлоемкости. При подаче сигнала с пульта управления автооператор с обрабатываемым изделием устанавливается над соответствующей ванной 21. После подачи очередного сигнала, поступающего на приводной двигатель 5, вращение зубчатых колес 7 и 8 преобразуется в поступательное перемещение рейки 2 вниз. Штанга 3 опускается вниз, так как блок 19 опускается совместно с рейкой 2. При этом одновременно вращение зубчатого колеса 8 передается зубчатому диску 15 с магнитами на его торце, которые воздействуют на контакты геркона 17 и после замыкания которых обрабатываемое изделие фиксируется в ванне с раствором. После обработки детали подается сигнал с программного устройства на двигатель 5 и штанга 3 посредством зубчатых колес 7 и 8 и рейки 2 поднимается вверх. По окончании дополнительной очистки обрабатываемого изделия, происходящей над поверхностью раствора в его порах, штанга 3 фиксируется в верхнем положении датчиком вертикального перемещения. Предложенный автооператор является более компактным по сравнению с базовым объектом, а также приобретает динамическую устойчивость из-за снижения общей высоты при сохранении опорной базы. 1 з.п. ф-лы, 5 ил.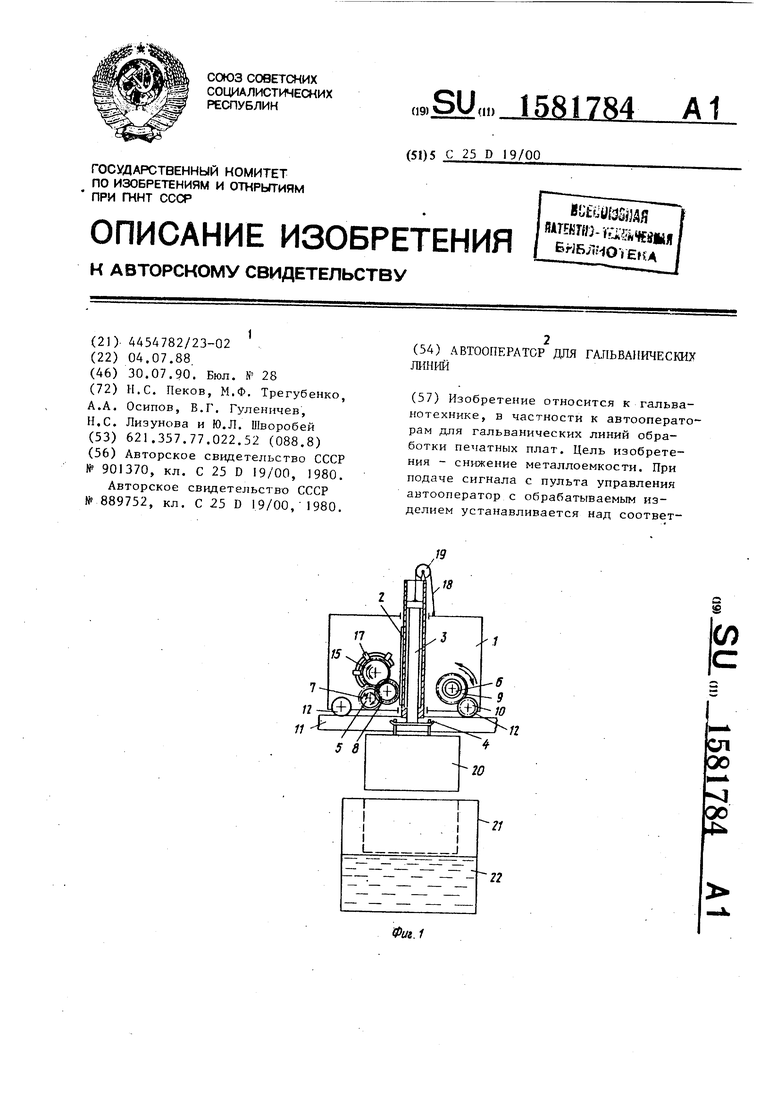
К
Фиг. 2
Фиг.
Редактор Т..Лаэоренко
Составитель Ю. Болобан Техред Л.Сердкжова
Заказ 2069
Тираж 549
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фиг.5
Корректор М. Шароши
Подписное
| Автооператор для гальванических линий | 1980 |
|
SU901370A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Автооператор для гальванических линий | 1980 |
|
SU889752A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
