Изобретение относится к оборудованию для упаковки полупроводниковых приборов с предварительной формовкой выводов перед автоматизированным монтажом на печатные платы, в частности приборов, имеющих цилиндрическую форму корпуса и однонаправленные выводы, расположенные в одной плоскости и может быть использовано в радиоэлектронной промышленности.
Известны установки роторного типа для упаковки между перфорированной основной и липкой лентами изделий электронной техники с однонаправленными выводами, в которых изделия из вибробункера по лотку загружаются в гнезда ротора, совершающего дискретное вращение. На различных позициях осуществляются операции по формовке выводов и упаковке изделий между лентами при остановке ротора.
В качестве прототипа выбрана эксплуатируемая в отрасли японская установка TWA505K для упаковки между лентами полупроводниковых приборов с однонаправленными выводами, лежащими в одной плоскости. Установка содержит вибробункер, лоток, механизм загрузки приборов, роторный захват, механизм формовки выводов, привод и прижимной ролик. Сориентированные в вибробункере приборы из лотка загружаются и фиксируются в гнездах роторного захвата, который совершает дискретное вращение от привода. На различных позициях осуществляются операции по формовке выводов и упаковке между лентами изделий, находящихся непосредственно в гнездах роторного захвата при его остановке.
Однако производительность этой установки ограничена из-за необходимости остановки роторного захвата для осуществления формовки выводов прибора в его гнезде.
Установка довольно сложна по конструкции из-за наличия сложных кинематических связей, обеспечивающих синхронное дискретное срабатывание отдельных исполнительных механизмов, в том числе дискретное вращение роторного захвата от одного привода.
Целью изобретения является упрощение конструкции устройства и повышение его производительности за счет обеспечения непрерывности вращения роторного захвата.
Поставленная цель достигается тем, что в устройстве для упаковки между лентами полупроводниковых приборов, содержащем вибробункер, лоток, механизм формовки выводов, роторный захват, привод и прижимной ролик для ленты с термоклеющим слоем, механизм формовки выводов смонтирован на лотке, имеет свой привод и снабжен подпружиненным клиновым фиксатором и призматическим фиксатором, связанным с пуансоном формовки упругой кинематической связью, причем оба фиксатора смонтированы с возможностью возвратно-поступательного перемещения в пазу, выполненном в лотке перпендикулярно направляющему пазу, а над роторным захватом после лотка смонтирован механизм базирования приборов, выполненный в виде закрепленных на кольцевом секторе упругих пластин, торцы которых расположены параллельно оси роторного захвата с шагом, не превышающим диаметр прибора, и последняя пластина заходит за линию, соединяющую центры прижимного ролика и роторного захвата.
Поскольку механизм формовки выводов смонтирован на лотке и имеет свой привод, то формовка выводов осуществляется вне роторного захвата, что дает возможность применить для формовки быстродействующий привод, а роторному захвату обеспечить непрерывное вращение и упростить конструкцию устройства, т.к. не нужны сложные кинематические связи для обеспечения синхронного дискретного срабатывания отдельных исполнительных механизмов от одного привода.
Подпружиненный клиновой и призматический фиксаторы, совершающие возвратно-поступательное движение в пазу, перпендикулярном направляющему пазу, обеспечивают соответственно фиксирование корпуса прибора в зоне формовки и в момент формовки, что сохраняет направление приборов от вибробункера до роторного захвата.
При непрерывном вращении роторного захвата корпуса приборов свободно заходят в его пазы, а упругие пластины механизма базирования поджимают их к одноименным поверхностям пазов, надежно базируя приборы к моменту упаковки.
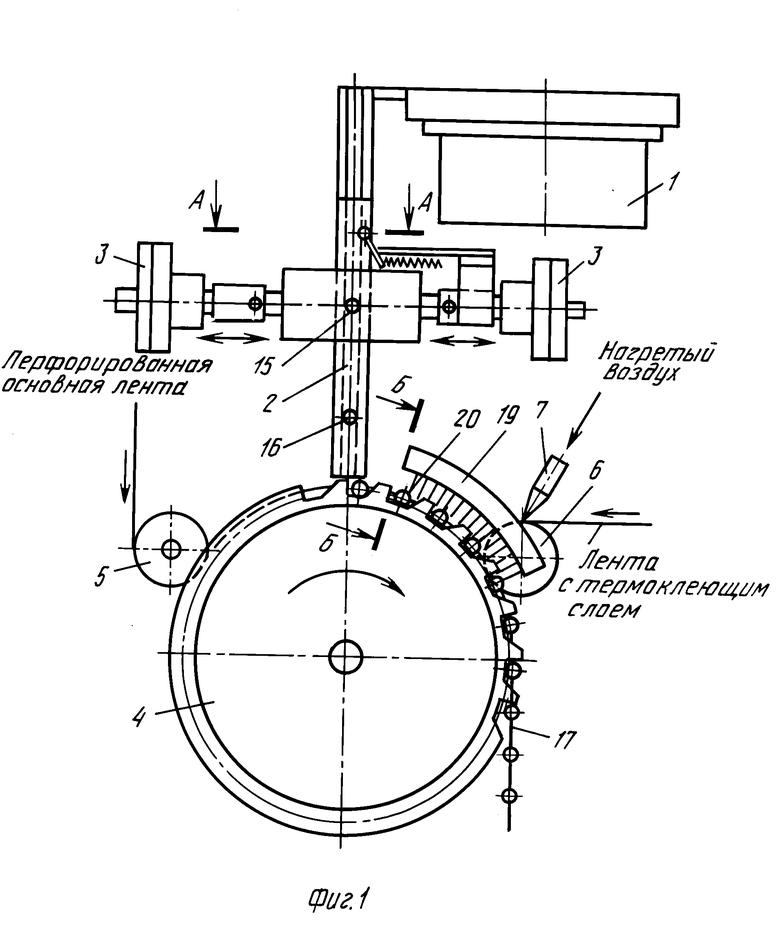
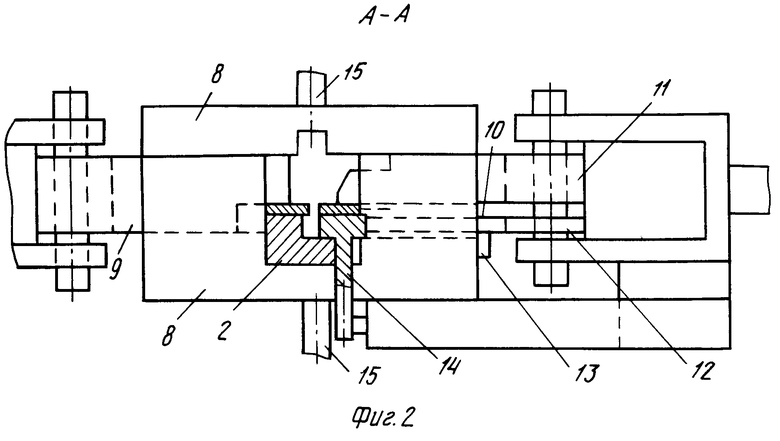
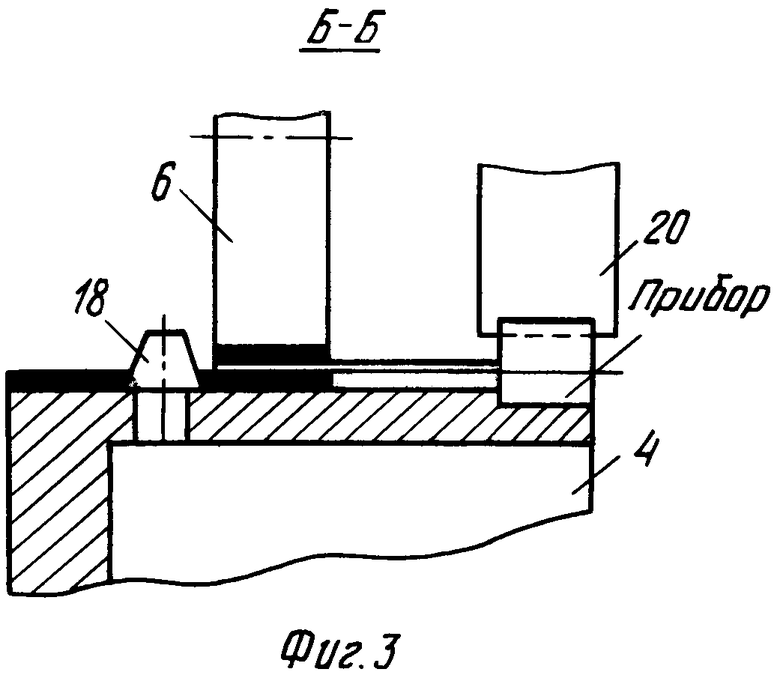
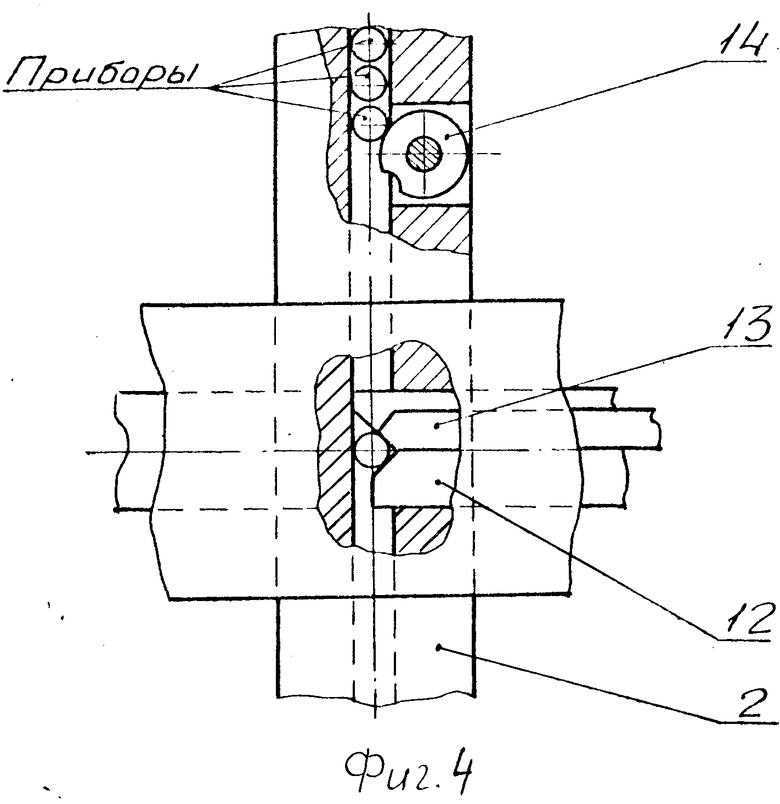
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - схема фиксации корпуса прибора в механизме формовки выводов.
Устройство содержит вибробункер 1, лоток 2, на котором смонтирован механизм формовки выводов с приводом 3, роторный захват 4, вращающийся от привода (не показан), механизм базирования корпусов приборов, ролик 5 для направления перфорированной основной ленты, прижимной ролик 6 и сопло 7 для подачи горячего воздуха.
Механизм формовки выводов содержит основание 8, в котором совершают возвратно-поступательное движение от привода 3 матрица 9, прижим 10 для выводов, пуансон 11 и связанный с ним упругой кинематической связью призматический фиксатор 12. Этот фиксатор 12 и подпружиненный клиновой фиксатор 13 смонтированы в пазу, выполненном в лотке 2 перпендикулярно направляющему пазу. Над механизмом формовки в лотке расположен дисковый отсекатель 14, кинематически связанный с приводом 3 и служащий для поштучной подачи приборов.
На лотке 2 смонтированы датчик 15 наличия прибора в зоне формовки и датчик 16 уровня накопительного столба приборов перед роторным захватом.
Роторный захват 4 представляет собой диск, на цилиндрической поверхности которого выполнены пазы 17 под корпус прибора и закреплены зубья 18 для зацепления перфорированной основной ленты. Ширина пазов 17 больше диаметра корпуса прибора. Механизм базирования смонтирован над роторным захватом 4 после направляющей и выполнен в виде закрепленных на кольцевом секторе 19 упругих пластин 20, торцы которых расположены параллельно оси роторного захвата с шагом, не превышающим диаметр прибора, а последняя пластина заходит за линию соединения центров прижимного ролика 6 и роторного захвата 4. Обод ролика 6 выполнен из эластичного материала.
Устройство работает следующим образом.
Перфорированная основная лента проходит по направляющему ролику 5 и, зацепляясь зубьями 18, обхватывает роторный захват 4.
Сориентированные в вибробункере 1 приборы поступают в лоток 2. Дисковый отсекатель 14 получает от привода 3 колебательное движение, обеспечивая подачу приборов по одному в механизм формовки выводов. Клиновой фиксатор 13 удерживает корпус прибора в зоне формовки, при этом срабатывает датчик 15, подающий сигнал на поступательное движение привода 3, при котором происходит поступательное движение в основании 8 матрицы 9 до жесткого упора, призматического фиксатора 12, прижима 10 и пуансона 11. В процессе движения фиксатора 12 корпус прибора своей цилиндрической поверхностью отталкивает фиксатор 13. За счет наличия упругой кинематической связи между фиксатором 12 и пуансоном 11 корпус прибора поджимается в лотке 2 фиксатором 12 и при этом обеспечивается дальнейшее поступательное движение пуансона 11. Прижим 10 прижимает выводы у корпуса прибора и пуансон 11 затем в совокупности с матрицей 9 формует вывода. При возвратном движении привода 3 матрица 9, пуансон 11, прижим 10 и фиксатор 12 возвращаются на исходную позицию, а подпружиненный фиксатор 13 нижней поверхностью клина принудительно толкает прибор вниз.
Сигналом от датчика 16 путем включения и отключения привода 3 поддерживается заданный уровень накопительного столба приборов в лотке 2, что обеспечивает непрерывную подачу приборов в пазы 17 непрерывно вращающегося роторного захвата 4. Поскольку ширина пазов 17 больше диаметра корпуса прибора, то корпуса свободно нагружаются в них, а формованные выводы при этом ложатся на перфорированную основную ленту. Далее корпуса соприкасаются с торцами упругих пластин 20 и поскольку шаг их расположения не превышает диаметра корпуса, а последняя пластина заходит за линию соединения центров прижимного ролика 6 и роторного захвата 4, то в любой момент не менее одной пластины соприкасается с корпусом, надежно удерживая его в пазу 17 и перемещая к опорной поверхности паза. Таким образом, к моменту упаковки приборов между лентами корпуса занимают фиксированное положение в пазах 17, соответствующее шагу упаковки. Роликом 6 липкая лента прижимается к выводам прибора и перфорированной ленте, через сопло 7 осуществляется подача нагретого воздуха для подогрева липкой ленты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подготовки радиоэлементов с однонаправленными выводами к монтажу | 1983 |
|
SU1164798A1 |
| ШТАМП-АВТОМАТ | 2000 |
|
RU2193941C2 |
| Автомат для сборки болтов с шайбами | 1985 |
|
SU1349953A1 |
| Линия для пайки | 1986 |
|
SU1433665A1 |
| Устройство для сборки корпусных деталей с комплектующими | 1988 |
|
SU1511042A1 |
| Автомат для сборки хомута из ленты | 1972 |
|
SU562358A1 |
| Установка для изготовления изделий из ленты | 1981 |
|
SU1178556A1 |
| Установка для сборки перед пайкой корпуса с выводами | 1982 |
|
SU1050824A1 |
| Линия для подготовки микросхем к монтажу | 1978 |
|
SU788464A1 |
| Роторная машина для подгибки бокового электрода запальных свечей | 1974 |
|
SU541537A1 |
Изобретение относится к упаковочному оборудованию, в частности к устройствам для упаковки полупроводниковых приборов между основной и липкой лентами. Цель изобретения - повышение производительности устройства. Устройство для упаковки между лентами полупроводниковых приборов с однонаправленными выводами, расположенными в одной плоскости, содержит вибробункер, лоток, механизм формовки выводов, транспортирующий привод и прижимной ролик. Новым в устройстве является то, что механизм формовки выводов смонтирован на лотке, имеет свой привод и снабжен подпружиненным клиновым фиксатором и призматическим фиксатором, связанным с пуансоном формовки упругой кинематической связью, причем оба фиксатора имеют возможность совершать возвратно-поступательное движение в пазу, выполненном в лотке перпендикулярно направляющему пазу, а над роторным захватом после лотка смонтирован механизм базирования приборов, выполненный в виде закрепленных на кольцевом секторе упругих пластин, торцы которых расположены параллельно оси роторного захвата с шагом, не превышающим диаметр прибора, и последняя пластина заходит за линию, соединяющую центры прижимного ролика и роторного захвата. 4 ил.
УСТРОЙСТВО ДЛЯ УПАКОВКИ МЕЖДУ ЛЕНТАМИ ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ С ОДНОНАПРАВЛЕННЫМИ ВЫВОДАМИ, РАСПОЛОЖЕННЫМИ В ОДНОЙ ПЛОСКОСТИ, содержащее вибробункер, загрузочный лоток с направляющим каналом, механизм формовки выводов приборов с пуансоном, транспортирующий ротор с гнездами для приборов и прижимной ролик, отличающееся тем, что, с целью повышения производительности, оно снабжено размещенным над транспортирующим ротором механизмом базирования приборов, выполненным в виде закрепленных на кольцевом секторе упругих пластин, торцевые поверхности которых расположены параллельно оси вращения транспортирующего ротора с шагом, равным наружному диаметру корпуса прибора, последняя пластина расположена за линией соединения центров прижимного ролика и транспортирующего ротора, а механизм формовки выводов установлен на загрузочном лотке и снабжен автономным приводом и кинематически соединенными с его пуансоном подпружиненным клиновым и призматическим фиксаторами, установленными с возможностью возвратно-поступательного перемещения в пазу, выполненном в стенке загрузочного лотка перпендикулярно его направляющему каналу.
| Способ получения целлюлозы из стеблей хлопчатника | 1912 |
|
SU505A1 |
| Техническое описание | |||
| фирма Takyoweld Cof to (Япония) | |||
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
